A guide to selecting
a manual hydraulic
directional control
valve
Characteristics and congurations of manual directional
control valves used in hydraulic systems - selecting the right
valve for the job.
Directional control valves are probably the most common of
all hydraulic components and are used to control the starting,
stopping and reversal of ow in a system. ey are oen
associated with the control of a hydraulic actuator, such as a
cylinder or motor, to select either ‘forward, reverse or stop’ but
can also be used anywhere in a system where ow needs to be
switched between alternative paths.
Author:
Steve Skinner
therefore control both the inlet and exhaust ow from a
double acting cylinder or motor.
e second factor in the valve selection process is the
number of spool positions required. Normally this will be
a choice between a two-position or three-position valve
and will depend upon the requirements of the system.
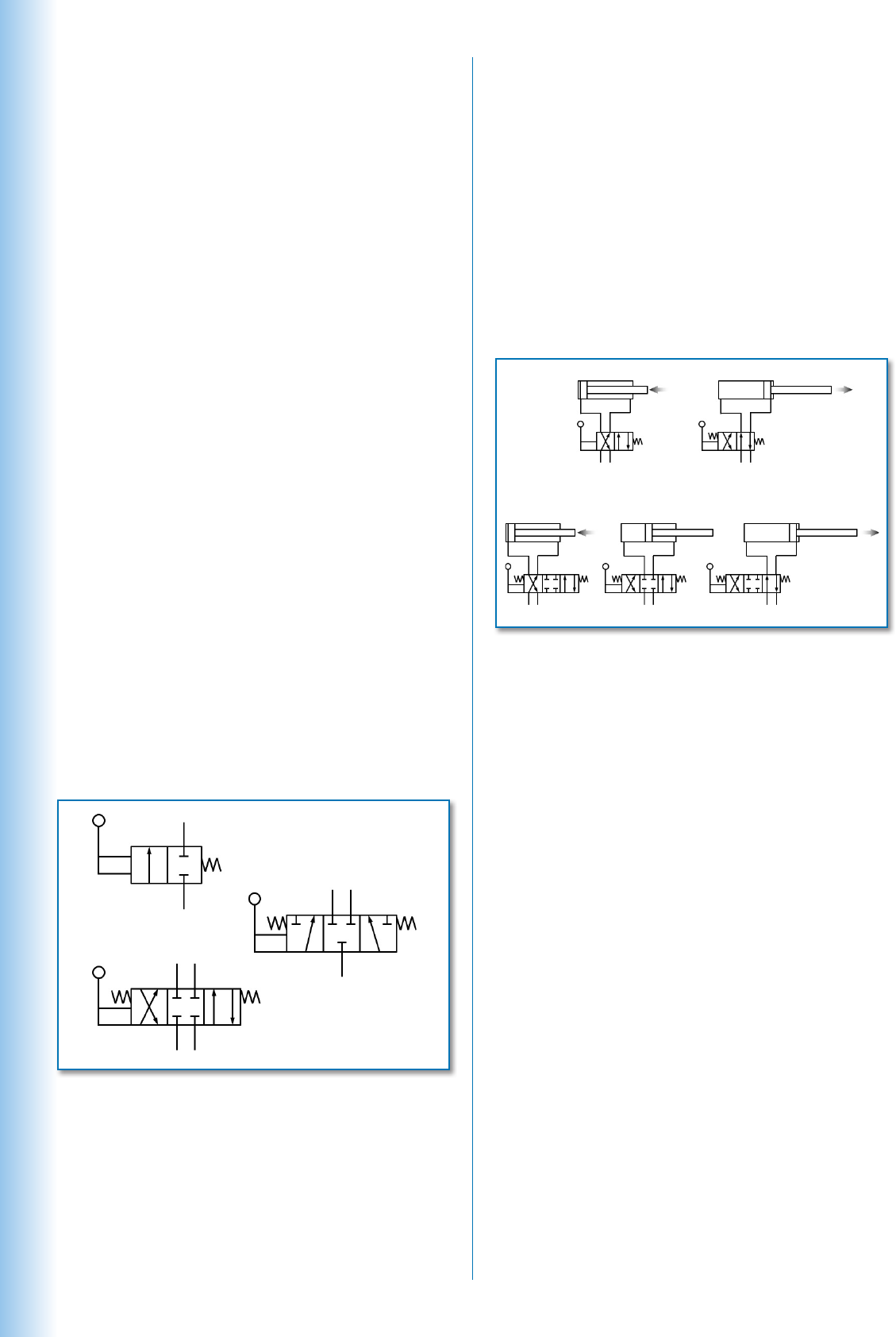
Considering a four-port valve controlling a cylinder as
shown in gure 2, a two-position valve will be able to direct
the uid ow to either fully extend or fully retract the piston
depending upon the spool position. With the three-position
valve however it is also possible to centre the valve and thus
stop the piston at any point along its stroke.
e conguration of two-position valves can be either
spring-oset or detented. A spring-oset valve, as its
name suggests, will be biased by means of a spring to one
position or another such that when the valve operating
lever or plunger is released the valve will automatically
return to its oset position. In some applications this could
be used to return an actuator to its normal or ‘parked’
position when the operator releases the lever or to prevent
a machine operation unless the valve is actuated. From a
safety point of view however, consideration must be given
to the consequences of a spring failure in the valve.
A detented valve has no spring return or oset feature
and having moved the valve lever and spool it will simply
stay in position when released. Normally there will be
some form of detent or friction grip mechanism included
to ensure that the valve cannot then move inadvertently
(due to vibration for example).
A three position valve can also be detented to remain in
any one of its three positions or it can be spring-centre
which means that the valve will spring back to its centre
position when the lever is released. Typical graphical
symbols for the two types of valve are shown in gure 3.
In some cases, the directional valve oers minimum
restriction to the ow as it passes through the valve
thus acting simply as a ow ‘switch’. In other situations
the valve can also act as a regulating valve to restrict the
ow rate and thereby control the speed of operation of an
actuator for example. In many applications the transition
from one situation to another, eg. the starting, stopping
or reversal of an actuator and load, will require careful
consideration.
e selection of the correct directional valve for
a particular application is therefore not always a
straightforward process and careful consideration has
to be given to the type and conguration of valve used.
Although solenoid operated valves in industrial systems
and sectional valves in mobile systems are the most
commonly used directional control components, there
are many situations where a simple manually operated
directional valve is also of use. is may be either as the
main directional valve in simpler systems or for a back-
up/emergency operation in more complex ones.
is paper will therefore review the choices and
characteristics of common manual directional valves
available in order to help the applications engineer or
system designer in selecting the correct valve for the job.
BACKGROUND
e rst consideration when selecting a directional valve
for use in a hydraulic system is to determine how many
ports or ow paths are required. Generally speaking,
valves are available with either two, three or four ports as
shown in gure 1.
It could be argued however that a two port valve is more
accurately described as an on/o valve since it does not
control the ow direction but simply switches it on or
o. e three-port valve has an inlet (P) port which
can be switched between two possible outlets (A or B)
depending upon the state of actuation of the valve. e
four-port valve adds a return to tank (T) port and can
2
Fig. 1
Fig. 2
A
P
REVERSE FORWARD
TWO - POSITION
REVERSE STOP FORWARD
THREE - POSITION
A
P
B
T
A
P
B
TWO PORT
THREE PORT
FOUR PORT
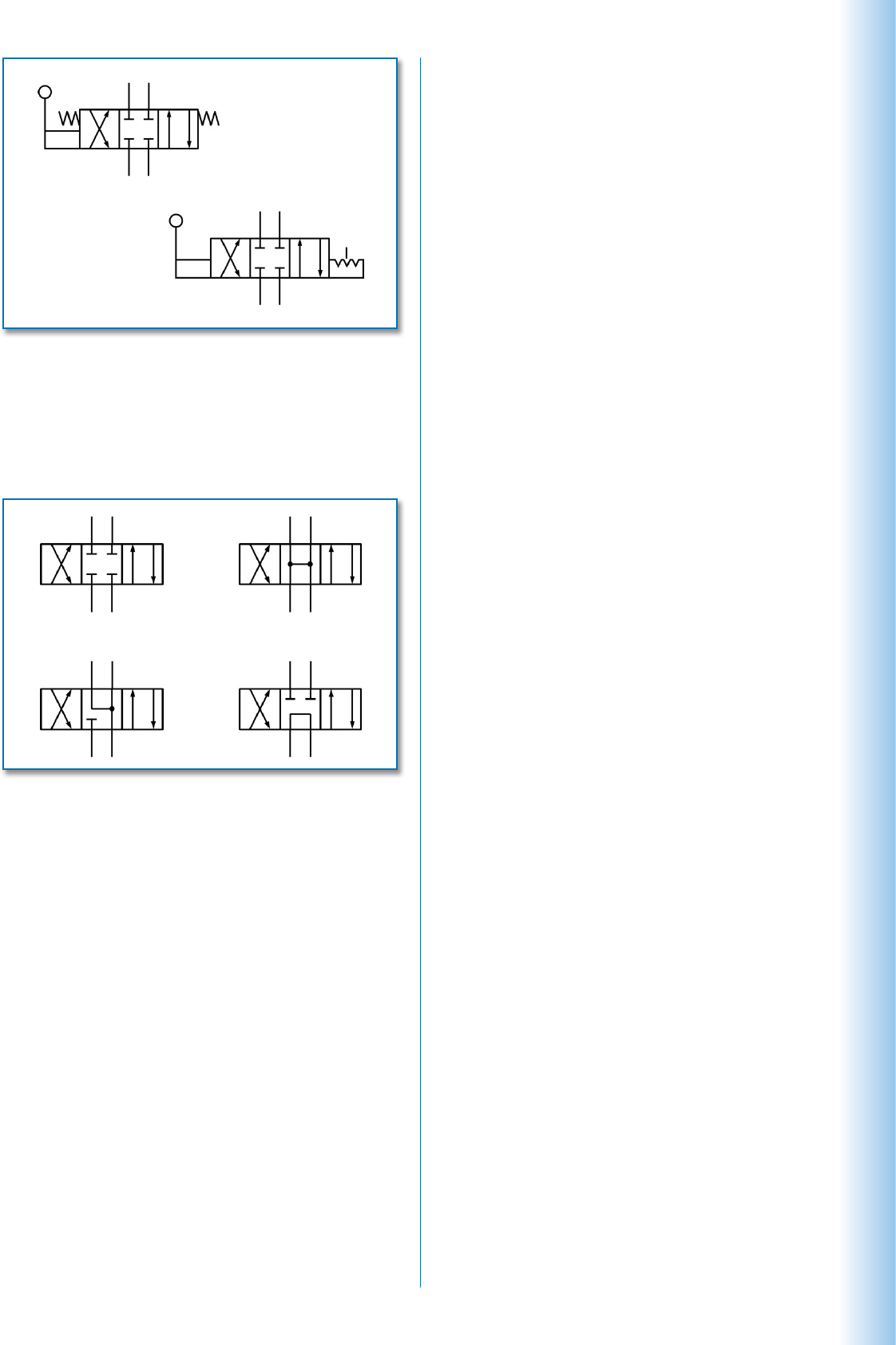
e ow conguration of the valve in the centre position
is something that will oen require careful consideration.
Just about any conguration is possible from all ports
blocked to all ports connected together but gure 4
illustrates some of the more common arrangements.
An all ports blocked conguration (a) will block o the
pump ow at the ‘P’ port (thus enabling the pump ow
to be used in other parts of the system) and at the same
time block ow into or out of an actuator thus locking
it in position. It should be remembered however that,
depending upon the type of valve used, it may still be
possible to have leakage from any port to any other port
when in this position which could allow the actuator to
creep. Also of course with a hydraulic motor, there will
inevitably be leakage internally in the motor across the
ports and possibly into its external drain connection so
even a leak-proof valve will not positively lock a motor
in position. In some applications however, a leak-
proof valve will be a distinct advantage, for example in
clamping applications or where pressure on a cylinder is
maintained by means of an accumulator.
An open centre valve (b) will unload the pump ow freely
back to tank in the central position, while allowing the
actuator to ‘oat’ i.e. move virtually freely under the action
of an external force. Unloading the pump may reduce the
amount of waste heat generated in the system but it also
means of course that the pump ow is not available to
operate other functions while the valve is centred.
To enable a oat condition of the A and B ports but
retain use of the pump ow for other functions, the
conguration shown in gure 4c could be used which
has the ‘P’ port blocked but maintains the ‘A’ and ‘B’ ports
open to tank.
Alternatively, if it is required to unload the pump but
prevent movement of the actuator the ‘tandem’ centre
condition can be used as shown in gure 4d. As before
however, depending upon the type of valve used, leakage
may still take place into or out of the ‘A’ and ‘B’ ports
when the valve is centred.
As mentioned previously, many dierent congurations
are possible in the valve centre position but the four
illustrated in gure 4 are the most common. Which
conguration is most suitable will depend therefore on
the whether the pump ow needs to be unloaded or not
and the characteristics and requirements of the actuator
and its associated load.
Certain types of manual directional valve enable the
ow paths to be opened and closed progressively thus
providing a degree of ow control in combination with
the basic directional valve function. is can provide
the operator with a means of controlling the speed of
an actuator and also control of its rate of stopping and
starting (acceleration and deceleration).
Finally the pressure and ow ratings of the valve need
to be determined. is is normally a straightforward
process once the system design parameters have been
calculated with respect to ow and pressure. When
controlling dierential area cylinders however, it must
be remembered that the area and volume on either side
of the piston will be dierent which means that the ow
rates through the two ow paths of the directional valve
will also be dierent. For example, if the cylinder has a
full bore to annulus area ratio of 2 to 1, the exhaust ow
from the annulus side will be half the inlet ow to the full
bore side when extending. More signicantly however,
the exhaust ow from the full bore side when retracting
will be twice the inlet ow to the annulus side. For this
reason the ow rating of the directional valve chosen
may have to be greater than the pump ow alone.
Similarly, when determining the pressure rating of a valve
controlling a dierential area cylinder, potential pressure
intensication must be taken into account. Pressure
intensication oen occurs when restricting the exhaust
ow from the annulus side of a cylinder, especially when
3
Fig. 3
A
SPRING CENTRED
P
DETENTED
T
B
Fig. 4
A
P
B
T
A
A
P T
B
A
P
B
T
A
P
B
T
A
P
B
T
a) CLOSED
CENTRE
b) OPEN
CENTRE
c) FLOAT
CENTRE
d) TANDEM
CENTRE
As with any sliding spool valve however, sealing between
ports is achieved by the closeness of the spool t within
the body. e size of the clearance between spool and
body is always a compromise between enabling the spool
to slide freely without sticking (especially important for
spring return spools) and reducing the leakage through
the clearance to a minimum. In practice therefore, for a
75 l/min (20 gpm) rated ow valve, leakage rates (from P
port to T port) of the order of 150 – 200 mL/min (10 – 12
in
3
/min) would be typical when operating at maximum
pressure.
e spool to body clearance of this type of valve also
makes it susceptible to contamination particles being
forced into the clearance by the pressure dierence
causing wear and possible malfunction (failure to spring
return). Even particles smaller than the spool to body
clearance can over time build up and jam the spool (a
phenomenon known as ‘silting’).
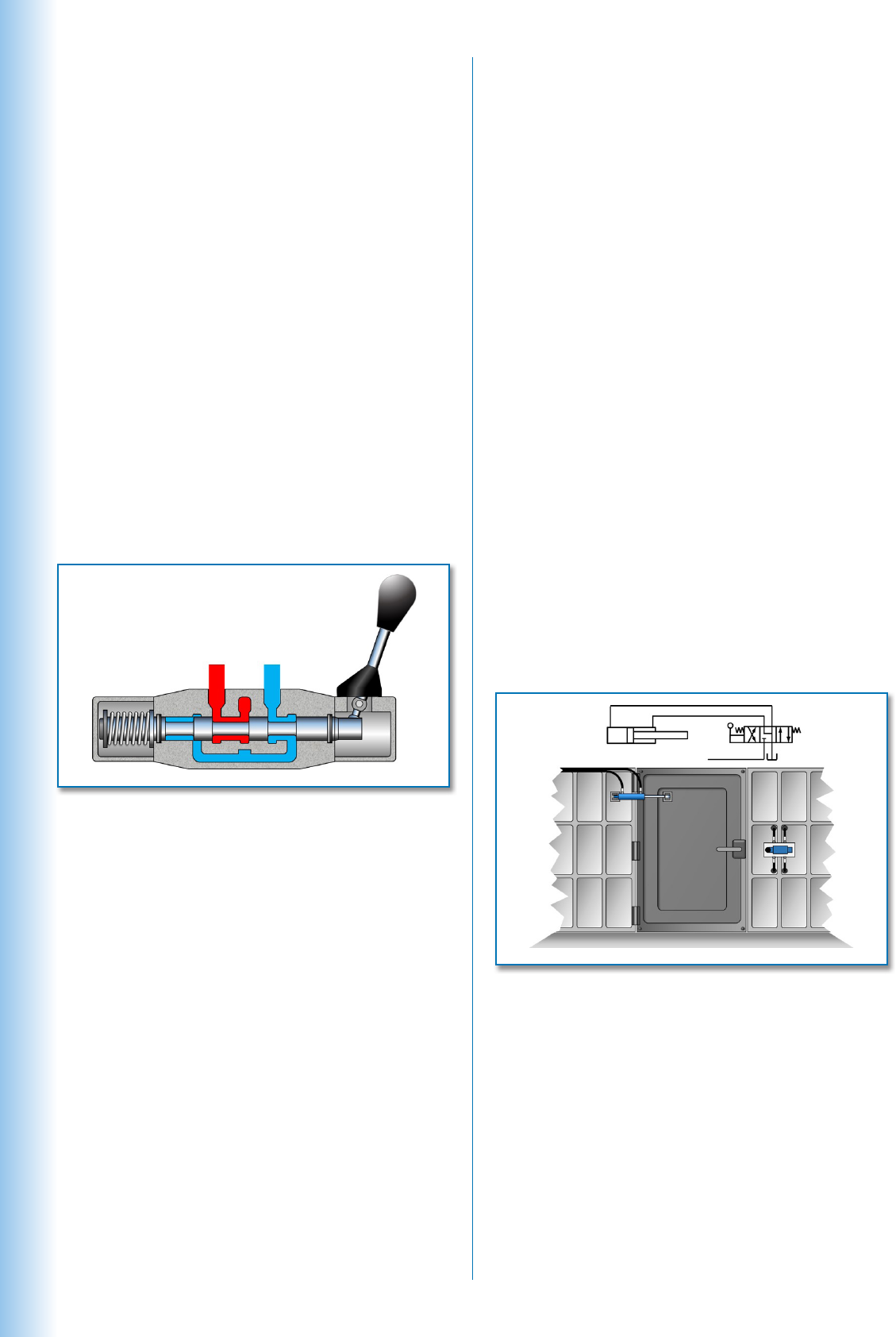
Where a leak-proof valve is not required however (e.g.
in motor drive applications) and for pressures up to
approximately 350 bar (5000 psi) the sliding spool valve
can oer a low-cost solution and is available in a relatively
large range of sizes. Typical applications include the
direction control of hatches, doors, ramps etc. where
load holding is not required or where additional valves
are included to provide load holding (gure 6).
ROTARY SPOOL VALVES
Rotary spool valves also use a spool tted in a sleeve but
in this case the spool is rotated to select the ow paths
rather than sliding (gure 7).
the cylinder is subjected to a negative (‘runaway’) load,
or decelerating a high inertia load. A valve may therefore
have to be selected with a pressure rating higher than the
normal system operating pressure at the pump outlet.
VALVE OPTIONS
Having determined the basic specication for the
directional valve, the next step involves determining
what type of valve will best meet the specication. e
options for valve construction include:
l Sliding spool valves
l Rotary spool valves
l Ball valves
l Poppet valves
l Rotary shear valves
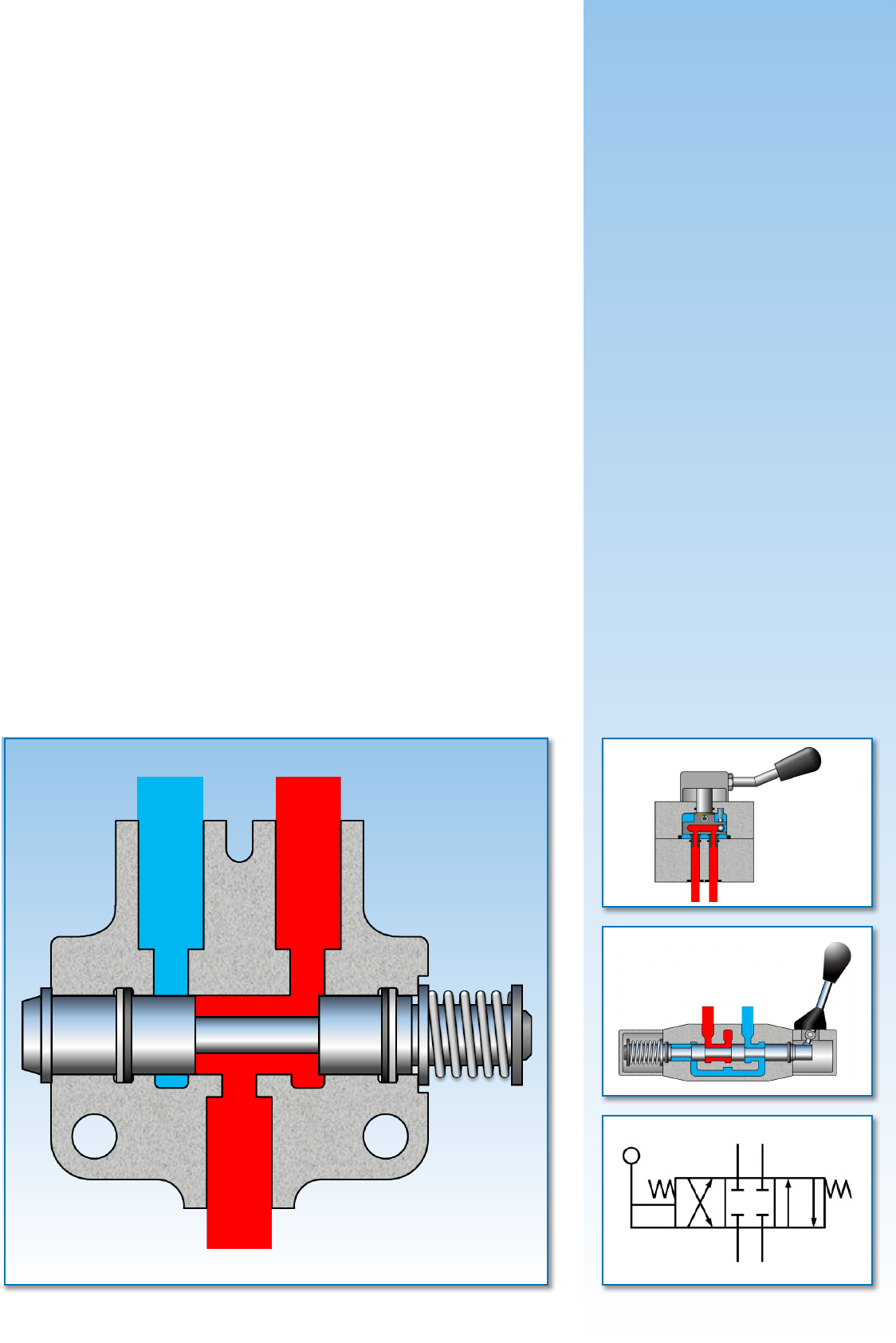
SLIDING SPOOL VALVES
As their name suggests, sliding spool valves operate by
moving a spool linearly within a closely tting body in
order to connect or block ports machined within the
body as shown in gure 5.
is type of valve is available in many dierent
congurations such as two or three position, spring-
oset, spring-centred and detented. Also, numerous
options are available for the spool centre condition. Such
valves can be individually mounted, normally onto a
standard ISO 4401 / CETOP / NFPA manifold interface,
or mounted together as valve segments when two or
more valves are required. Manifold mounted valves oen
use parts common to the equivalent solenoid valves
which are produced in very large numbers by many
dierent manufacturers and so benet from the reduced
manufacturing costs that large scale production provides.
ey are therefore one of the lowest cost alternatives of
manual directional valves. Typically, valve sizes range
from 30 L/min (8 gpm) up to 120 L/min (32 gpm) and
higher. For valves designed to t onto a standard interface
the maximum pressure rating will be determined by the
interface itself and will be in the range 250 to 350 bar
(3600 to 5000 psi).
4
Fig. 5
A
P
T
B
Fig. 6
P
Inlet ow is normally at the end of the spool and passes
through a passageway along the centre of the spool. Holes
and slots in the spool are then either opened up or blocked
o from the ports in the body as the spool is rotated by the
hand lever to create the required ow paths.
Rotary spool valves are frequently manufactured as
‘screw-in cartridge’ valves which enables them to be
either incorporated into manifold blocks along with other
control valves or mounted in their own individual body.
In some applications a rotary lever is less susceptible to
inadvertent operation and also when panel mounting
the valve the pipe connections and valve body can be
mounted behind the panel leaving just the operating
lever on the panel front.
Leakage and contamination sensitivity will be similar
to sliding spool directional valves so the valves are not
suitable on their own for applications requiring a leak-
proof function. Pressure ratings also will be similar to
those of sliding spool valves but ow ratings tend to be in
the range up to 50 L/min (13 gpm) although some may
go to larger sizes. Figure 8 illustrates a typical application
for a rotary spool valve used to control the direction of
rotation of a hydraulic motor powering a concrete core
drill. e valve would typically be a three-position valve
(to provide forward, reverse and stop functions of the
motor) and be detented to avoid the need for the operator
to continuously hold it in position.
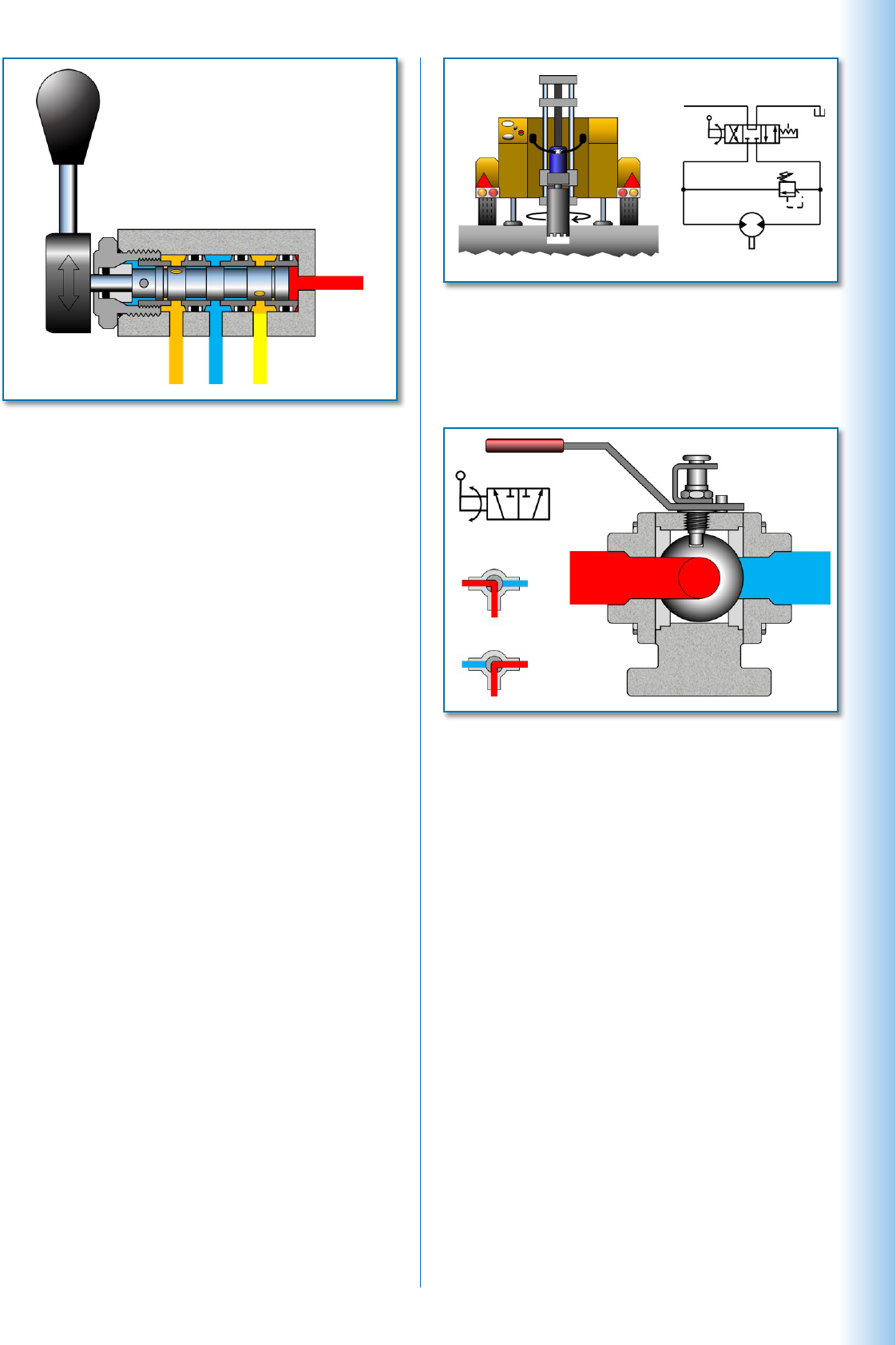
BALL VALVES
A ball valve is also a rotary valve but in this case passageways
are provided through a spherical ball which can be rotated
inside a ball seat by means of a handle (gure 9).
Ball valves are normally two or three-port valves with
ow taking place when the passageways through the ball
line up with the ports in the valve body and seat. ey
are very simple components and are available in a very
large range of sizes, congurations and pressure ratings
(up to 1000 bar or 15000 psi). Although the valve can
be partially opened to provide a basic ow throttling
function, one of the main advantages of a ball valve is
the fact that when fully open they oer very little ow
restriction i.e. the ow path is virtually a straight-through
connection. is makes them ideal for use in such areas
as pump suction lines where they can isolate the pump
for maintenance purposes but oer very little resistance
to pump inlet ow when open and hence reduce the
likelihood of pump cavitation (gure 10).
5
Fig. 7
P
A T B
Fig. 8
Fig. 9
P
2 3
1
3 2
1
3 1 2
3 2
1
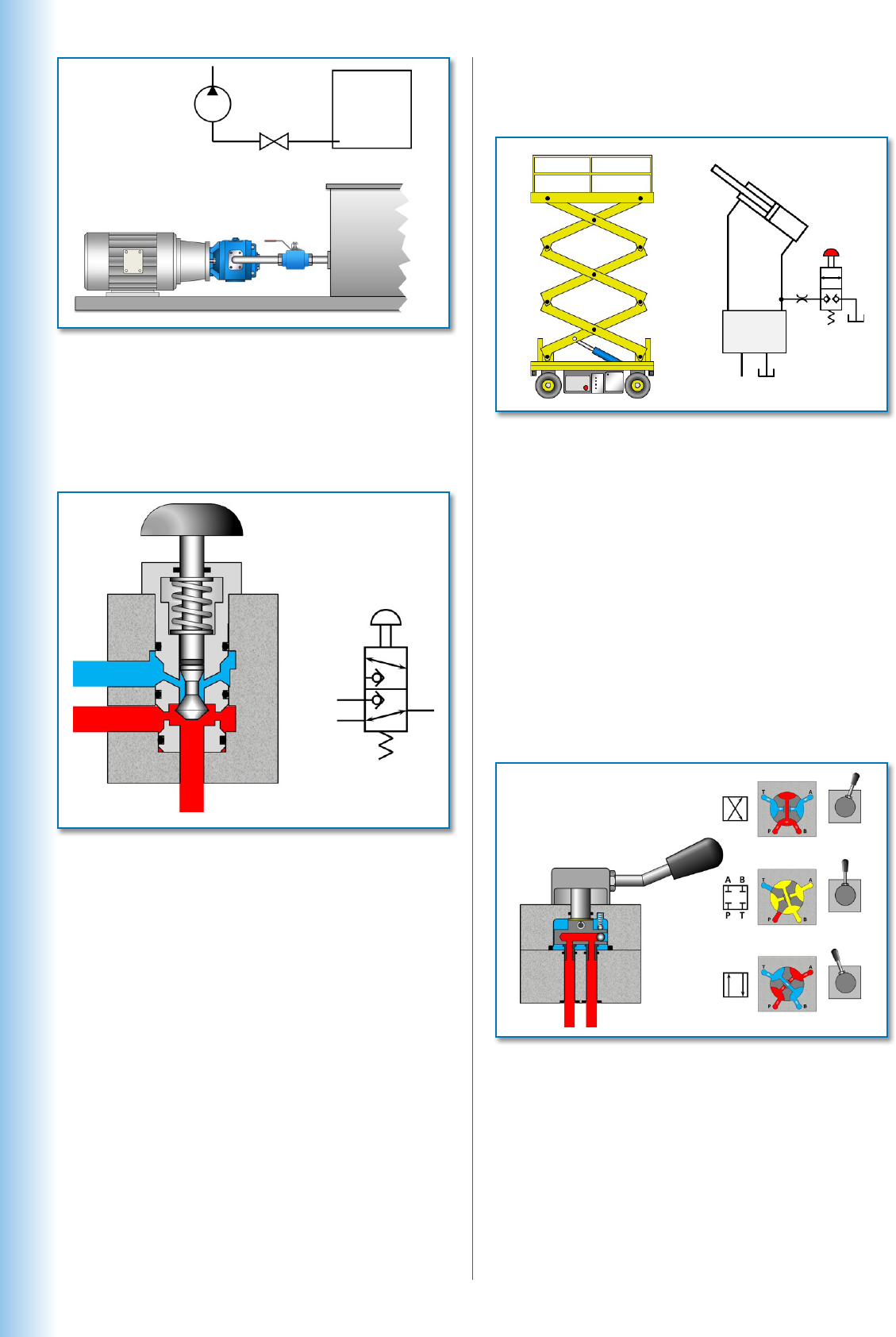
Figure 12 shows a 2-way poppet valve used for emergency
lowering of a scissor li (for example for use in the event
of an electrical power failure).
In this application is it obviously important to use a
valve with a virtually leak-proof characteristic to prevent
leakage from the li cylinder during normal operation.
However, poppet valves tend to be either open or closed
so little control over the amount of ow is possible
to regulate the speed of lowering. If this is required
therefore, an additional restrictor or needle valve may be
required in the system.
ROTARY SHEAR VALVES
Rotary shear valves use connections through a at plate
to transmit ow from one port to another as shown in
gure 13.
A seat tted to each port is hydraulically pressed against
the at plate and by careful manufacturing an optically
at connection between the two components can be
obtained. Although it would be technically incorrect to
describe any type of directional valve as ‘leak-proof’, the
rotary shear valve is probably as close as it is possible to
get to a leak-proof operation. Maximum leakage rates
are quoted as one drop every ten minutes even for larger
POPPET VALVES
Flow through a poppet valve is controlled by means of
a ball or conical poppet being pushed against, or lied
clear of a seat as shown in gure 11.
Typically they are two or three-way valves although two
valves can be incorporated in a common body to provide
a full four-way function. e fact that the valve blocks
ow by the action of a poppet sitting on a seat creating
a metal-to-metal contact, means that poppet valves are
close to being leak-proof and thus separate load holding
valves (for example to prevent creep on a vertically loaded
cylinder) are oen not required. With no clearance
between moving components, poppet valves are also
less susceptible to uid contamination issues although
large contamination particles may still prevent the valve
seating correctly or even damage the poppet or seat. e
fact that the opening the valve oen requires a relatively
large amount of force on the valve stem, (to overcome the
out of balance pressure force) means that rated ows for
poppet valves are relatively low although pressure ratings
up to 350 bar (5000 psi) and higher can be achieved.
6
Fig. 12
Fig. 13
Fig. 10
Fig. 11
P
3
2
1
3
1
2
Some rotary shear valves are able to throttle the ow
by partial opening of the valve (oen referred to as
‘inter-ow’) is provides a useful feature when used
as an emergency lowering valve for example in that the
speed of lowering under gravity can be regulated by the
directional valve itself rather than requiring additional
components.
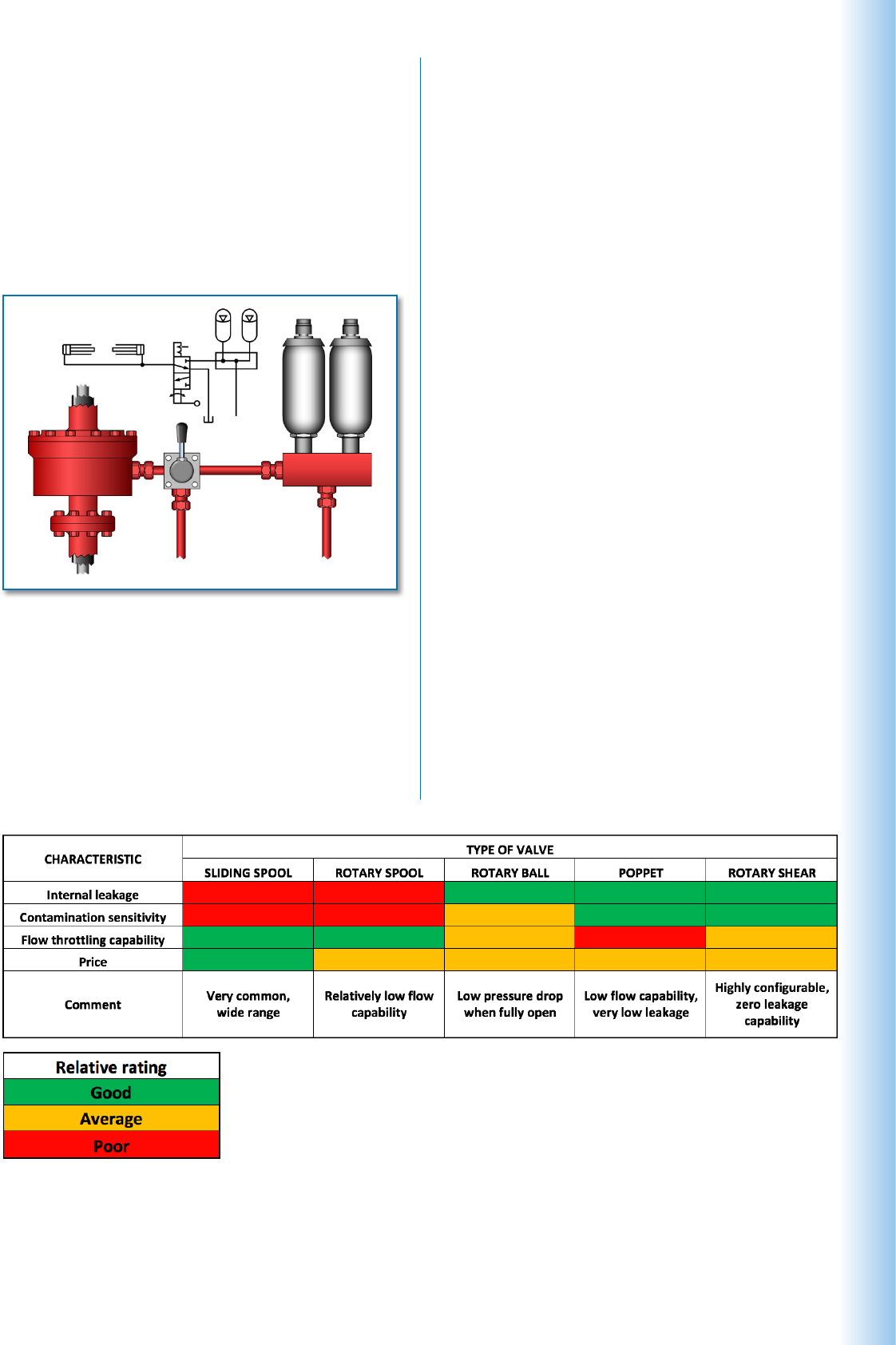
CONCLUSION
As with all hydraulic components, no one type of
manual directional valve will prove suitable for all
applications. It is therefore necessary for system
designers and applications engineers to determine the
key characteristics required of a directional valve and
then choose the most appropriate type for the job. As has
been described, such characteristics may include:
l Flow conguration
l Pressure rating
l Flow rating
l Fluid compatibility
l Contamination sensitivity
l Internal leakage
l Mounting arrangements and options
l Flow throttling capability
l Environmental suitability
e nal consideration of course is cost but this should
really only be taken into account once the technical
requirements have been met.
e table shown in gure 15 summarises the characteristics
of the dierent valves discussed in this paper.
valves up to approximately 40 L/min (10 gpm) rated ow
with smaller valves even less. Pressure ratings up to 700
bar (10,000 psi) are also possible depending upon the
size of valve. Combined with a relatively low sensitivity
to contamination damage, this type of valve is therefore
a very popular choice where zero leakage combined
with high pressure capability are key requirements. An
example application is shown in gure 14 where the valve
is used to control the operation of a blow-out preventer
(BOP) on an oil drilling rig.
Power for the BOP is provided by hydraulic accumulators
so the leak-proof characteristic of the valve ensures
accumulator charge does not leak away over relatively
long periods of time. Manual operation of the valve
also avoids the necessity for expensive ATEX approved
solenoid valves.
7
Fig. 14
P
P
P
DIRECTIONAL
VALVE
BLOW-OUT
PREVENTER
ACCUMULATORS
Fig. 15

Milwaukee, WI 53235, USA
Tel: +1 (414) 769-6400
St. Ives, Cambs. PE27 3LZ, UK
Tel: +44 (0) 1480 397 400
www.webtec.com
8
Designed and produced by Webtec - DIRVAL-ED-ENG-3539.pdf - 07/16
About the Author:
Steve Skinner
Steve Skinner has a degree in Mechanical
Engineering from the University of Bath and
has been involved in hydraulic uid power
systems for over 40 years including working
on circuit design, on-site commissioning,
troubleshooting, sales and marketing.
He is also the author of a number of training
booklets as well as a book entitled, ‘Hydraulic
Fluid Power, A Historical Timeline’, which he
describes as, “a light-hearted ramble through
the history of hydraulic uid power from its
birth at the end of the 18th century up to the
modern day”. To nd out more visit:
www.steveskinnerpresentations.co.uk
About Webtec:
We are specialist manufacturers of hydraulic
measurement and control products helping to
improve the productivity of heavy machinery.
For over 50 years we have been helping
customers worldwide in the Industrial, Mobile,
and Agricultural sectors to diagnose hydraulic
faults, verify hydraulic conditions and achieve
repeatable hydraulic control.
For further details and to discuss your manual
directional control valve application with a
qualied hydraulic sales engineer, please go to
www.webtec.com
