Foundationally Verified
Data Plane Programming
Qinshi Wang
A Dissertation
Presented to the Faculty
of Princeton University
in Candidacy for the Degree
of Doctor of Philosophy
Recommended for Acceptance
by the Department of
Computer Science
Adviser: Prof. Andrew W. Appel
September 2023
© Copyright by Qinshi Wang, 2023.
All rights reserved.
Abstract
P4 is a major standardized programming language for programming and specifying
the network data plane. P4 is widely used in a variety of network functionalities, in-
cluding monitoring, traffic management, forwarding, and security. Recently, stateful
applications have been emerging in this area, as supported by programmable hard-
ware. Typical stateful applications include network telemetry (heavy hitters, dis-
tributed denial-of-service (DDoS) detection, performance monitoring), middleboxes
(firewalls, network address translation (NAT), load balancers, intrusion detection),
and distributed services (in-network caching, lock management, conflict detection).
Their complexity and rich properties are beyond the ability of existing P4 verifiers.
In this thesis, we propose Verifiable P4: a new framework for P4 program verifica-
tion based on interactive theorem proving that is (1) capable of proving multi-packet
properties, (2) modular in terms of the structure of P4 programs, and (3) foundation-
ally sound with respect to a mechanized formal semantics of P4. In order to achieve
these goals, we built (1) a mechanized formal semantics of P4 more comprehensive
and convenient than existing formal semantics, (2) a set of program logic rules that
are proven sound, and (3) an interactive verification system based on the program
logic and Coq tactic mechanism. We verified a stateful firewall fully implemented in
P4 using a sliding-window Bloom filter with Verifiable P4 and evaluated its utility.
3
Acknowledgements
It was a long and challenging journey to pursue a Ph.D. degree, and it is my
fortune to have received support from so many people.
First, I would like to express my gratitude my advisor, Andrew W. Appel, who led
me to the fantastic field of software verification, and provided great guidance during
my Ph.D. studies. In Spring 2018, when I was looking for a research direction that
is both theoretically interesting and practically useful, I took his course on theorem
proving and programming languages and fell in love with this field. As my advisor,
he is a smart guide on research, a patient mentor on writing, and an invaluable
cornerstone in my academic journey.
I appreciate my thesis committee, Nate Foster, David Walker, Jennifer Rexford,
and Zachary Kincaid. Their insightful feedback and constructive criticism have sig-
nificantly enhanced my research and the quality of this thesis.
I am grateful to Qinxiang Cao, who has been a great model of success and mentor
for me in both competitions and research since my high school days.
I would like to acknowledge my collaborators, Andrew W. Appel, Lennart
Beringer, Qinxiang Cao, Joshua Cohen, Ryan Doenges, Mengying Pan, Rudy Pe-
terson, Vilhelm Sj¨oberg, and Shengyi Wang. It was my honor and pleasure to have
worked with them.
I am thankful to my friends, Tingting Cai, Xiaoqi Chen, Jiaxin Guan, Guanhua
He, Zhongtian He, Junnan Hu, Renzhi Jing, Changshuo Liu, Shang Mu, Yuqi Nie,
Liqun Peng, Zhiyi Ren, Weiyi Tang, Chenggong Wang, Lianyong Wang, Gaoyuan
Wu, Yantao Wu, Zhelun Wu, Dazhi Xi, Zhaojian Xu, Weikun Yang, Conghao Yi,
Qiang Zhang, Wenda Zhang, Zidong Zhang, Yuyan Zhao, and Yuqing Zhu, who have
made my life brighter and more colorful.
4
I would like to express my gratitude to my family friends Lan Bin and Fred Ling,
who have offered guidance and care as if I were their nephew.
Finally, I wish to express my most profound appreciation to my parents, Qian
Xu and Weibing Wang. Their unwavering love, boundless support, endless patience,
and constant belief in my dreams have been the cornerstone of my academic jour-
ney. Especially when the COVID-19 pandemic brought unprecedented challenges that
destabilized my life, their guidance and reassurance were a beacon of hope, enabling
me to persevere and continue pursuing my goals with determination in those trying
times.
This material is based upon work supported by the Defense Advanced Research
Projects Agency (DARPA) under Contract No. HR001120C0160.
5
Contents
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1 Introduction 12
1.1 Introduction to P4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.2 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.2.1 Early P4 Verifiers . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.2.2 Aquila . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.2.3 Π4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.2.4 Petr4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.3 Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6
2 P4 Semantics 28
2.1 P4light and the front end . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2 Instantiation phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.1 Function lookup . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.2.2 Abstract methods . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.3 Execution phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.3.1 Uninitialized bits . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.3.2 Nondeterministic semantics . . . . . . . . . . . . . . . . . . . 41
2.3.3 Semantic rules . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.4 Comparison with Petr4 . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2.5 Architecture specification . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.6 Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3 Program Logic 60
3.1 Hierarchical extern predicates . . . . . . . . . . . . . . . . . . . . . . 62
3.2 Program logic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.2.1 Program logic rules . . . . . . . . . . . . . . . . . . . . . . . . 72
4 Tactic-Based Verifier 75
4.1 Walkthrough . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.2 Tactics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.3 Automated proof of MOD-clauses . . . . . . . . . . . . . . . . . . . . 83
7
5 Application Demonstration: Sliding-Window Bloom Filter 86
5.1 Sliding-window Bloom filter . . . . . . . . . . . . . . . . . . . . . . . 87
5.1.1 P4 implementation . . . . . . . . . . . . . . . . . . . . . . . . 90
5.2 Verification organization . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.2.1 Axiomatic interface of SBF . . . . . . . . . . . . . . . . . . . 97
5.3 Verification of sliding-window Bloom filter . . . . . . . . . . . . . . . 99
5.3.1 Concrete functional model . . . . . . . . . . . . . . . . . . . . 99
5.3.2 Function specifications . . . . . . . . . . . . . . . . . . . . . . 101
5.3.3 Verification of abstract methods . . . . . . . . . . . . . . . . . 102
5.3.4 Abstract functional model . . . . . . . . . . . . . . . . . . . . 104
5.3.5 Refinement proof . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.4 Verification of stateful firewall . . . . . . . . . . . . . . . . . . . . . . 109
5.4.1 Verifying the P4 program of stateful firewall . . . . . . . . . . 110
5.4.2 Switch model . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
5.4.3 Flow property proof . . . . . . . . . . . . . . . . . . . . . . . 111
6 Conclusion 113
6.1 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
A Programs Omitted in the Main Text 116
A.1 P4 implementation of sliding-window Bloom filter and stateful firewall 116
A.2 Concrete functional model . . . . . . . . . . . . . . . . . . . . . . . . 130
Bibliography 145
8
List of Figures
1.1 Very Simple Switch (VSS) architecture . . . . . . . . . . . . . . . . . 16
1.2 Architecture header file of VSS . . . . . . . . . . . . . . . . . . . . . 17
2.1 Example of instantiation . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.2 Pseudocode of instantiation . . . . . . . . . . . . . . . . . . . . . . . 35
2.3 Semantics rules for function lookup . . . . . . . . . . . . . . . . . . . 38
2.4 An example of abstract method . . . . . . . . . . . . . . . . . . . . . 39
2.5 L-value evaluation, read and write rules of P4light . . . . . . . . . . . 45
2.6 Semantics rules for argument evaluation . . . . . . . . . . . . . . . . 46
2.7 Semantics rules for statements . . . . . . . . . . . . . . . . . . . . . . 47
2.8 Semantics rules for function call expressions . . . . . . . . . . . . . . 48
2.9 Semantics rules for functions . . . . . . . . . . . . . . . . . . . . . . . 49
2.10 Petr4’s Core P4 semantic rules for objects . . . . . . . . . . . . . . . 51
2.11 Comparison with Petr4 on location manipulation . . . . . . . . . . . 53
2.12 P4 program in Example 2.1 . . . . . . . . . . . . . . . . . . . . . . . 54
3.1 Simple form of function specification . . . . . . . . . . . . . . . . . . 61
3.2 Inference rules for well-formedness . . . . . . . . . . . . . . . . . . . . 65
10
3.3 Function specification . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.4 Sample program logic rules . . . . . . . . . . . . . . . . . . . . . . . . 72
4.1 An example P4 control block in V1Model . . . . . . . . . . . . . . . . 77
4.2 Function specification of Increment . . . . . . . . . . . . . . . . . . . 77
4.3 Proof script of Increment . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.1 Panes in a sliding window Bloom filter . . . . . . . . . . . . . . . . . 89
5.2 Behavior of execute in RegisterAction . . . . . . . . . . . . . . . . . . 91
5.3 Overview. Rounded rectangles represent blocks of definitions; paral-
lelograms represent blocks of proofs. A solid line indicates that a block
depends on the implementation of another block; a dashed line indi-
cates that a block depends only on the interface of another block. A
proof block usually establishes the relationship between two definition
block and therefore depends on these two blocks. The proof body is ir-
relevant to its usage, so proof blocks are always depended with dashed
lines. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.4 Axiomatic interface of SBF . . . . . . . . . . . . . . . . . . . . . . . . 98
5.5 Function Specifications with concrete functional model . . . . . . . . 101
5.6 Function specifications in RegisterAction . . . . . . . . . . . . . . . . 103
5.7 Function Specifications relating the abstract functional model . . . . 108
5.8 Switch model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
11
Chapter 1
Introduction
Nowadays, computer networking is indispensable almost everywhere. Network hosts
are connected through network switches. Traditionally, network switches are fixed-
function devices, whose behavior is specified and implemented by their manufactur-
ers. In recent years, people have become interested in programming languages for
switches, for two reasons: first, in order to secure the network, it is worth specifying
and reasoning about networks, including the behavior of switches and links; second,
programmable switches are prevalent in scenarios demanding flexibility, especially
since programmable switches have evolved to be as fast as fixed-function switches, we
need a programming language for them.
P4 [5, 12] is the most widespread programming language for specifying and pro-
gramming switches. [22] But P4 is a low-level language, and P4 programs are often
contorted to fit within the constraints of resources in a particular target architecture,
which is designed to process billions of packets per second. So the correctness of
these programs has become a concern. To address that concern, there are several
verification tools for P4 programs (see Section 1.2).
In many classic P4 applications, processing a packet does not typically change
the state of the switch. But recently there are new applications for programmable
12
data planes, in which each packet changes the state of the switch and affects how
the following packets are processed. These applications include network telemetry
systems (SketchLib [31], BeauCoup [9], FlowRadar [27]), network functions (SilkRoad
[30]), and distributed services (NetCache [24], NetLock [46]). Misconfiguration in such
programs may lead to serious network failures. But the existing verification tools
cannot reason about the packet-to-packet state changes of these stateful programs.
For example, consider a stateful firewall that protects the internal network from
unsolicited traffic. External packets should be permitted to enter through the firewall
only if they are responses to recent outgoing requests to the same IP address. The
stateful firewall remembers recent outgoing packet headers. We need to verify a prop-
erty about multiple packets: no valid incoming responses are blocked. A small rate of
false positives is tolerated, i.e., allowing incoming packets that are not responses.
The multi-packet property that we want to verify can be formally written as
follows. Let T be the valid response time window, h be the list of historical packets,
p be the current packet and r be the action on p (forwarding or dropping it). We
want that for every integer i, we have
p.dir = in ∧ h[i].dir = out ∧ h[i].dst = p.src ∧
h[i].src = p.dst ∧ p.t − h[i].t ≤ T =⇒ r = forward.
To verify such programs, we need stateful reasoning. None of the existing veri-
fiers can properly characterize the way the switch’s state changes per packet, either
because they don’t handle state at all, or because their specification languages are
too weak to properly relate the pre-state to the post-state after processing a packet
(see Section 1.2); and none of existing verifiers can reason about such multi-packet
properties.
13

Arbitrary multi-packet properties cannot be proved fully automatically.
1
So we
embed our verifier in an interactive proof assistant (Coq)—this allows a very general-
purpose logic in which almost any kind of mathematics can be expressed. Inevitably,
in such general math one cannot always get 100% proof automation. To minimize
proof workload, we use Coq’s programmability to automate where possible (matching
P4 to functional models) and we use interactive proof where necessary (proving multi-
packet properties from per-packet state changes).
Modular proofs clarify protocols between modules and make modules reusable.
In order to modularize P4 programs with stateful objects, we propose a hierarchical
representation of states used in semantics, specification, and verification that im-
proves modularity; unlike some previous P4 semantics, we enforce a phase distinction
between instantiation (that populates this hierarchy) and run-time packet processing.
All programs, including verification tools, can have bugs. P4 verifiers with bugs
can “verify” something that isn’t true. The correctness concern of P4 verifiers has
not been fully addressed in the previous work (see Section 1.2). Our verifier has a
once-and-for-all machine-checked soundness guarantee: if it can prove a property of
your program, then your program behaves that way in the P4 semantics.
Contributions We have built Verifiable P4, which is a P4 verification system in
Coq that supports very rich specifications, especially for stateful programs. The veri-
fication system also makes modular verification possible, and the verification result is
foundational. We have applied Verifiable P4 to a stateful firewall purely implemented
in P4 using a sliding-window Bloom filter, and proved the multi-packet property that
solicited packets are never dropped. In particular, we make the following technical
contributions:
1
P4 programs does not have loops or recursions for a single packet, so it might be possible to
automatically reason about single-packet processing. But lifting from single-packet processing to
multi-packet processing involves induction, which is known to be difficult.
14
1. We revisit the formal semantics in Petr4 [18], and propose a phase distinction
between instantiation (compile-time allocation) and execution (run-time packet
processing). This phase distinction makes the semantics clearer and easier to
reason about.
2. We built a mechanized semantics for P4 in Coq, guided by the P4
16
Language
Specification [12].
3. We propose a hierarchy for states, semantics, specification, and verification that
improves modular verification. We define hierarchical predicates to specify state
of extern objects.
4. We demonstrate the program logic and verification tool by verifying a high-
performance implementation of a stateful firewall that uses a sliding-window
Bloom filter.
1.1 Introduction to P4
P4 is a standardized programming language for both programming programmable
network switches and specifying nonprogrammable network switches. This section
gives a brief introduction to readers not familiar with P4, by giving a walkthrough
example and pointing out some key aspects of P4.
P4 runs on different hardware/software platforms, each of which is called a P4
target. A P4 architecture is the interface that describes the programming model
of a target. A target may support multiple architectures, which makes the target
compatible with programs written for different architectures. An architecture may
be implemented by multiple targets, too.
Figure 1.1 illustrates the Very Simple Switch (VSS) architecture (adapted from the
P4
16
Specification [12]), which is a P4 architecture for introductory purposes. It has
three P4-programmable components: the parser, the match-action pipeline, and the
15

Parser
Match-action
pipeline
Deparser
input
packet
input
headers
payload
output
headers
output
packet
Control plane
tables
Figure 1.1: Very Simple Switch (VSS) architecture
deparser. The remaining parts of the switch are nonprogrammable. When a packet
is processed by a VSS switch, it is first parsed by the programmable parser, and the
headers are passed to the match-action pipeline while the rest of the packet, called
the payload, is directly passed to the deparser. The match-action pipeline produces
output headers by performing operations determined by the P4 program and tables.
These tables can be dynamically updated by the control plane. The deparser then
reassembles the output headers with the payload to form the output packet.
Figure 1.2 is the architecture header file of the VSS architecture, which should
be included by every P4 program on VSS. For a real architecture, such a file should
be provided by the manufacturer. It defines the interface
2
of each P4-programmable
block, namely Parser, Pipe, and Deparser. Each P4-programmable block is an instance,
which will be introduced later, but its entrance can be viewed as a P4 function,
3
and
its function signature has to match the corresponding interface. These interfaces do
not have return values. In fact, although there are some other functions in P4 that
have return values, a different value-passing mechanism, called copy-in/copy-out, is
consistently used instead of return values.
2
They are called parser types/control types in the P4 specification.
3
We use a more general definition of “function” than the P4 Specification. Any entity callable
at runtime is regarded as a function.
16
#include <core.p4> // P4’s standard core library
struct std meta t {
bit<9> ingress port;
bit<9> egress port;
}
parser Parser<H>(packet in pkt, out H hdrs, inout std meta t std meta);
control Pipe<H>(inout H hdrs, inout std meta t std meta);
control Deparser<H>(packet out pkt, in H hdrs);
package VSS<H>(Parser<H> p, Pipe<H> pipe, Deparser<H> dp);
extern Checksum16 {
Checksum16(); // constructor
void clear(); // reset checksum
void update<T>(in T data); // add data to checksum
void remove<T>(in T data); // remove data from existing checksum
bit<16> get(); // get the checksum for the data added since last clear
}
Figure 1.2: Architecture header file of VSS
In the copy-in/copy-out mechanism, function parameters are usually directed,
including in, out, inout. in parameters are normal parameters passed from the caller
to the function; out parameters are similar to return values and passed from the
function to the caller; inout parameters serve the role of both in and out parameters.
In addition, there are directionless parameters, such as pkt in the interfaces Parser
and Deparser. Directionless parameters are evaluated at compile time, so they must
be compile-time known values. Unlike directional parameters, they can be objects,
such as packet in and packet out, which represent the input packet and the output
packet, respectively. Package interface VSS defines that a P4 program for a VSS
switch consists of a Parser, a Pipe, and a Deparser.
The architecture header file also contains the interface of extern objects and func-
tions available in the architecture. While the expressiveness of P4 is limited, each
target hardware provides various additional functionalities, which are modeled as
17

extern objects and functions in P4. For example, VSS supports an extern object,
Checksum16. The user can create an instance of Checksum16 and use its methods to
calculate the checksum of a header. packet in and packet out are also extern objects,
which are defined in core.p4. The library core.p4 is a standard file. It defines standard
types of P4, and should be included by every P4 program.
The architecture can impose different restrictions on each programmable block,
tailored to the hardware capabilities. For example, in VSS, Checksum16 can only be
used in the parser and the deparser, and tables can only be defined in the match-
action pipeline. Although these restrictions are not described in the header file, the
compiler may reject programs that violate such restrictions. Also, the hardware has
limited resources, so programs may be rejected by the compiler because it cannot find
a layout to fit the program in the hardware.
In the following paragraphs, we show an example P4 program on the VSS archi-
tecture that performs the standard IPv4 forwarding, offering a concrete example for
the fundamental concepts and structure of P4 programs.
1 #include <vss.p4>
2
3 header Ethernet h {
4 EthernetAddress dstAddr;
5 EthernetAddress srcAddr;
6 bit<16> etherType;
7 }
8
9 struct hdrs t {
10 Ethernet h ethernet;
11 IPv4 h ip;
12 }
The P4 program starts by including the architecture description and defining
header types. Ethernet h is the Ethernet header, which consists of three fields. A
header in P4 is like a struct,
4
except that it includes an extra bit indicating its
4
struct in P4 is similar to struct in C.
18

validity. The fields of a header are meaningful only when the header is valid. We
omit the definition of IPv4 header (IPv4 h). The type hdrs t is a struct that includes
the headers to manipulate for a packet.
13 parser MyParser(packet in pkt, out hdrs t hdrs, inout std meta t std meta) {
14 Checksum16() ck; // instantiate checksum unit
15
16 state start {
17 pkt.extract(hdrs.ethernet);
18 transition select(p.ethernet.etherType) {
19 0x0800: parse ipv4;
20 }
21 }
22
23 state parse ipv4 {
24 b.extract(p.ip);
25 ck.clear();
26 ck.update(p.ip);
27 // Verify that packet checksum is zero
28 verify(ck.get() == 16w0, error.IPv4ChecksumError);
29 transition accept;
30 }
31 }
Then comes the parser declaration MyParser. A P4 parser is a state machine in
which each state executes a program block and transitions to another state. It begins
from the state called start. In this example, the parser extracts the Ethernet header
from the packet, and examines the EtherType. It transitions to the parse ipv4 state
if the EtherType is 0x0800. Otherwise, the transition fails and the packet is rejected.
In parse ipv4, it extracts the IPv4 header from the packet and verifies its checksum.
The headers as result of parsing are passed out through the out parameter hdrs.
32 control MyPipe(inout hdrs t hdrs, inout std meta t std meta) {
33 IPv4Address nextHop;
34 action forward(IPv4Address nextHop, bit<9> port) {
35 nextHop = nextHop;
36 std meta.egress port = port;
37 hdrs.ipv4.ttl = hdrs.ipv4.ttl − 1;
19

38 }
39
40 action drop() {
41 std meta.egress port = DROP PORT;
42 }
43
44 table routing table {
45 key = {
46 hdrs.ipv4.dstAddr: lpm;
47 }
48 actions = {
49 forward();
50 drop();
51 }
52 default action = drop();
53 }
54
55 apply {
56 if (hdrs.ip.ttl ≤ 1)
57 drop();
58 routing table.apply();
59 dmac table.apply();
60 smac table.apply();
61 }
62 }
We then have a control declaration MyPipe, which programs the match-action
pipeline block. It analyzes the input headers and determines the packet’s forwarding
behavior. While it is simple in this example, this block is where the core logic is
implemented in more sophisticated applications.
The match-action pipeline consists of match-action tables. Each table contains
some entries, and invoking a table involves finding the entry that matches the keys,
and executing the action specified by the entry. The entries may be either maintained
dynamically by the control plane, or hardcoded in the P4 program as constants. In
this example, routing table is the conventional IPv4 routing table, whose entries are
maintained by the control plane, so the entries are not in the P4 program and may be
dynamically changed by the control plane between packets. The table examines the
20

destination address in the IPv4 header (as specified on line 46), and executes either
the action forward or the action drop. The parameters of the action forward do not
have direction annotations, which means they are given by the matched entry when
the table invokes forward. At the end of MyPipe is the apply block (line 55), which
is the main body of MyPipe. It also invokes tables dmac table and smac table, whose
definitions in MyPipe are omitted.
63 control MyDeparser(packet out pkt, in hdrs t hdrs) {
64 Checksum16() ck;
65 apply {
66 pkt.emit(hdrs.ethernet);
67 if (hdrs.ip.isValid()) {
68 ck.clear(); // prepare checksum unit
69 hdrs.ip.hdrChecksum = 16w0;
70 ck.update(p.ip); // compute new checksum according to RFC 791
71 hdrs.ip.hdrChecksum = ck.get();
72 }
73 pkt.emit(p.ip);
74 }
75 }
We then have a control declaration MyDeparser, i.e. the deparser block. It takes
the headers determined by the match-action pipeline to construct the output packet.
In this block, the function pkt.emit inserts a header into the packet.
76 VSS(MyParser(), MyPipe(), MyDeparser()) main;
The code blocks MyParser, MyPipe, and MyDeparser are declarations, they need
to be instantiated before being invoked. For example, the expression “MyParser()”
creates an instance of MyParser, and this instance is used in the instantiation of the
main package “VSS(...) main”, which represents the switch in the P4 program. So the
switch can invoke MyParser as its Parser block.
A parser or control declaration can be instantiated multiple times, so the instanti-
ation mechanism allows the code to be reused modularly to create more complicated
21
programs. In order to understand instantiation, we can compare to object-oriented
programming (OOP). Parser or control declarations are similar to classes in OOP,
and instances are similar to objects. In this thesis, we use classes to refer to parser
or control declarations, and use objects to refer to instances. We will discuss more
details about instantiation in Section 2.2.
In summary, the aspects in which P4 differs from conventional imperative pro-
gramming languages are: instantiation, copy-in/copy-out mechanism, parsers, tables,
extern objects and functions.
We have given a brief introduction for readers unfamiliar with the P4 language
to understand the content of this thesis smoothly. For more details about the P4
language, we refer to the P4 Specification [12]. For more applications of P4, we refer
to a comprehensive survey paper [22].
1.2 Related Work
In this section, we summarize existing works on P4 program correctness. We will
make more detailed comparisons of our results to other works in specific chapters of
the thesis from the programming language and verification perspective.
1.2.1 Early P4 Verifiers
Bugs in P4 programs have been of concern since the invention of the language. Three
first generation verifiers were built in 2018, including p4v [28], Vera [40], and ASSERT-
P4 [33]. These three verifiers are generally similar: they are all automatic and mono-
lithic tools to check properties less complex than full functional correctness for stateful
programs.
22

For example, if a P4 program accesses a field of an invalid header or drops a
packet due to a bug mishandling a packet field, these verifiers can identify the bug
and generate a counterexample. However, these verifiers are not capable to express
or verify properties that involve multiple packets, which are fundamental properties
of stateful applications.
p4v is an automatic verifier for P4
14
.
5
It verifies relatively simple properties,
including general safety properties (e.g. header validity), architectural properties (e.g.
parser roundtripping, which means the composition of deparsing and reparsing is the
identity function), and simple application-specific properties that are expressible by
Boolean logic and linear integer arithmetic. p4v translates P4 into guarded command
language [17]. The translation procedure unrolls P4 parsers into straight-line code and
rejects programs that contains unproductive cycles that do not extract any headers.
From guarded command language, p4v generates verification conditions and checks
them using Z3 [15].
The interesting technique is the treatment of tables that are filled by the control
plane. The entries of these tables are not given in the P4 program. Instead, the
control plane can modify them to change the packet processing policy, so we cannot
determine the action invoked by the table. To address this problem, p4v uses a
control plane interface to characterize the possibilities of each table, and includes all
the possible execution traces for the verification. Vera also uses this technique, where
it is called symbolic entries.
Vera is also an automatic verifier for P4
14
programs. It translates a P4 program
into the SEFL language in Symnet [41], which is a symbolic execution system for net-
work systems. It then uses Symnet to examine all possible execution paths of the P4
5
P4
14
is the predecessor language to P4
16
.
23
program. Vera automatically detects common mistakes and hazards, including im-
plicit drops, manipulating dropped packets, invalid header access, out-of-bounds ar-
ray accesses, and arithmetic overflows. Packets may be recirculated in the switch, i.e.
the P4 program may send a packet back to some earlier stages to process the packet
again. To reason about packet recirculation, Vera detects loops without progress, and
supports specifications in a subset of computation tree logic (CTL).
ASSERT-P4 is a verification tool for P4
16
, which translates the P4 program into
a C program together with the specification to analyze using KLEE [6]. However, as
we will show in Section 2.3, the semantics of C and the semantics of P4 are different,
making this encoding inaccurate and probably causing false reports of bugs.
These three verifier have made their contributions to the correctness of P4 pro-
grams, but they do not handle stateful objects well. Although p4v supports stateful
objects, we did not find any evidence that p4v can relate initial and final states. For
example, it cannot express that the final state of a register is obtained by modifying
a particular position from the initial state. Vera [40] uses an extremely expensive
encoding that is proportional to the size of registers (impractical when the regis-
ter contains an entire hash table). ASSERT-P4 does not claim to support stateful
objects.
1.2.2 Aquila
Aquila [42] supports a more convenient assertion language, multi-pipeline control,
more time-efficient verification, and bug localization when the verification claims a
bug. But Aquila oversimplifies registers into fields without indexes, so it could not
verify programs such as the stateful firewall. Aquila also reduces the risk of bugs in the
verifier by translation validation—checking whether its intermediate representation is
equivalent to the counterpart generated by Gauntlet [38] (which is a tool for finding
24
bugs in P4 compilers). But that does not address other software bugs, e.g. the bugs
in manipulating assertions, especially when we need a rich and modular assertion
language.
1.2.3 Π4
Π4 [20] is a research language and dependent refinement type system designed for a
subset of P4. This subset involves headers, parsers, deparsers, but not extern objects
and persistent state. The type system uses refinement types to represent constraints
on values. For example, {y : τ | 0 ≤ y.a < N} represents that variable a is in [0, N).
A dependent type of the form (x : τ
1
) → τ
2
is used to define a type for a program
segment, which means when starting with a state x that satisfies type τ
1
, the program
segment is safe and resulting state satisfies τ
2
. In particular, x may be referred to in
τ
2
to connect the initial and final states, e.g. τ
2
being {y : τ | y.a = x.a} means a’s
value stays the same.
Type checking in this system is similar to a verification task. Refinement types
are assertions, and dependent types for program segments are function contracts. Π4
also uses an SMT solver to check these types. So Π4 is similar to a verifier. Compar-
ing with previous verifiers, Π4 is compositional: once a program segment satisfies a
function contract, one can use the contract to verify the whole program that uses the
program segment. For example, this allows a device vendor to specify a fixed-function
component such that it can be compositionally verified with user-defined components,
and the vendor can modify the fixed-function component without breaking the veri-
fication, as long as the function contract of the fixed-function component still holds.
Π4 does not consider stateful objects, e.g. registers, so it cannot be used to reason
about stateful behaviour. Also, it does not have scopes to keep variables private in
modules.
25
1.2.4 Petr4
Petr4 [18] is a study of P4’s formal semantics, which gives us an important reference.
But Petr4’s semantics does not have a machine-checkable formalization, and mixes
instantiation and execution, which means it “instantiates at runtime” and has to de-
fine each control instance as a closure. This makes the semantics less straightforward
and makes it much more challenging to prove the program logic and the type system
sound. We improve this with a phase distinction between instantiation (Section 2.2)
and execution. We will compare our formalization with Petr4 in much more detail in
Section 2.4. We also identify and fix some bugs in Petr4 during the formalization in
Coq.
Summary Although there are several previous P4 verifiers, none of them address
the problem of writing and verifying nontrivial stateful programs, such as programs
based on data structures (sliding-window Bloom filter, count-min sketch, etc.).
1.3 Organization
It is assumed that the reader has basic knowledge about formal operational semantics
and program logic (e.g. Hoare logic). Readers may refer to textbooks [37, 36] for an
introduction to these concepts.
The rest of the thesis is organized as follows. Chapter 2 presents our formalization
and mechanization of P4’s operational semantics (by the author and Mengying Pan).
Chapter 3 shows the design of the Verifiable P4 program logic and its soundness (by
the author, with assistance of Shengyi Wang). Chapter 4 describes the verification
system based on the program logic and implemented using Coq’s Ltac (by the author,
with assistance of Mengying Pan and Shengyi Wang). Chapter 5 demonstrates an
end-to-end verified stateful firewall that combines the P4 program verification using
26
Chapter 2
P4 Semantics
The term “foundationally verified” means that the correctness or desired properties
of a program is verified with respect to its formal semantics. So the first step towards
foundationally verifying P4 programs is to define the operational semantics of the
P4 language. The authority document of P4 semantics is the P4
16
Specification [12]
written by the P4 Committee. But it is a document written in natural language and
pseudocode, instead of formal language. In order to clear the jungle, Doenges et al.
made an important initiative with Petr4 [18], a pen-and-paper formalization of P4’s
operational semantics. But Petr4 is not implemented in a proof assistant, so it does
not support mechanized proofs. Petr4 semantics also left some unresolved ambiguities
and unsupported P4 features.
In this chapter, we describe how we built a mechanized formalization of P4 se-
mantics by inheriting and improving Petr4. We introduce a phase distinction in P4’s
semantics that separates it into the instantiation phase (Section 2.2) and the exe-
cution phase (Section 2.3). This phase distinction mimics the actual deployment of
P4 programs: the compiler evaluates the P4 program itself, allocates hardware re-
sources, and produces a hardware program, and the hardware processes the packets
without higher-order computation and resource allocation. The instantiation phase
28
and the execution phase correspond to the compiler and the hardware, respectively.
Section 2.4 compares with Petr4’s semantics and explains the benefit of this approach.
P4 does not have C-style undefined behavior that permits completely arbitrary
results. Instead, it produces unspecified values when reading from uninitialized fields.
However, an easily overlooked point in P4’s semantics is that reading an uninitialized
field twice may yield different values [12, Section 8.23]. We implemented this feature
in the execution phase (Section 2.3).
P4 is a language for programming and specifying a variety of hardware and soft-
ware targets. A P4 architecture is a model for a set of compatible targets. The inter-
nal language constructs of P4 are independent from architectures, but P4 supports
architecture-specific extern objects and methods, and the switch’s global behavior
depends on the switch model. Section 2.5 shows how to write a formal architecture
specification and how our operational semantics is linked to an architecture specifica-
tion. An actual target may reject some programs during compilation due to resource
constraints. Our operational semantics does not specify any of these constraints but
what the program means when it can compile.
2.1 P4light and the front end
The formalization of P4 semantics is based on an abstract syntax tree (AST). But
which AST should we use in order to define formal semantics and verify programs
smoothly? According to the experience from CompCert Clight [3] and VST-Floyd [7]
on the C language, it is nicer to elaborate, annotate, and transform the AST before
defining the formal semantics and verifying programs. So we designed P4light, an
AST of P4 such that
• each expression node is annotated with its type and implicit type casts are made
explicit;
29

• each name is annotated with a locator (see below) to distinguish the same names
in different scopes;
• side-effect expressions do not nest as subexpressions;
1
• it is still close to P4 source code and each P4 light program is a legal P4 program.
We adapted the Petr4 front end (including the typechecker) to parse, elaborate,
and typecheck P4 source program into P4light. Two additional transformation passes
are applied to the AST after typechecking in order to make it easier to define the
semantics and analyze the program. The first pass extracts side effects from subex-
pressions such that every every expression with side effects (e.g. function call) must
appear directly on the right hand side of an assignment. For example, a = f(b) + c is
transformed into t1 = f(b); a = t1 + c. So when analyzing the program, we can treat
function calls as a kind of statement and do not have side effects when evaluating
expressions.
The second pass adds locators to names in a P4 program. Names in a P4 program
have multiple layers of scopes and the same identifier may not refer to the same thing.
So a locator is added to each appearance of names to distinguish them. The syntax
of locators is
Locator ::= glob p | inst p,
where p is a path, for names defined in the global scope and instance scopes (or say
class scopes), respectively. Theoretically, one could use identifiers instead of paths in
locators to do the same thing, but using paths makes it easier to track the location
where each name is defined. With locators, there is no need for the semantics to
maintain an environment mapping names to locations. (see Section 2.4)
1
This point simplifies the development of operational semantics and program logic, and improves
the interaction experience of our verifier. But P4 always evaluates expressions from left to right,
not like C, whose evaluation order is unspecified. So this transformation does not add restrictions
to the semantics.
30

2.2 Instantiation phase
P4 programs are often compiled and executed on programmable hardware (in other
cases, compiled to C code, etc.). Such hardware is similar to FPGAs in the way
that each computation unit is only used for one particular computation step once
the program is loaded into the hardware. Hardware resources cannot be dynamically
allocated during execution; programs cannot have loops, either. These constraints
are reflected in the language design of P4. P4 has reusable modules (parser and
control declarations), but the language only allows these modules to be instantiated
with “compile-time known” arguments, so that the compiler can create a copy of
the code for each usage and statically allocate hardware resources. For example,
Figure 2.1 shows a sliding-window Bloom filter
2
implemented modularly in P4. Each
sliding-window Bloom filter instance has 4 panes and each pane has 3 rows. Each row
must have a persistent state that survives between packets, which is implemented as
a “register” in the Tofino architecture
3
[23], the architecture used in this program.
Each of these registers needs to be allocated to a unique location in the hardware.
This is similar to hardware description languages, for example, modules in Verilog
[34], which can be reused by statically allocating copies on hardware, too. But to
my best knowledge, the instantiation phase has not been described in the literature
about Verilog’s formal semantics, nor in discussions of P4 semantics.
In order to have a clear and human-readable semantics and make it easy to ana-
lyze programs’ behavior, we separate the semantics of P4 programs into two phases:
the first is the instantiation phase, which simulates what the compiler should do;
the second is the execution phase, which simulates the hardware processing of each
2
In Chapter 5, we will explain what is a sliding-window Bloom filter, give the full version of
Figure 2.1 and demonstrate how to verify this P4 program using Coq and our Verifiable P4. Here
we only focus on its modular structure.
3
Tofino is a series of high-performance P4-programmable switch chips developed by Intel. With
its performance and flexibility, it is widely used in data centers.
31

package Switch(...); /∗ Prototype of the main package ∗/
control Row(...) { /∗ A Bloom filter row ∗/
Register<...>(...) reg; ...
}
control Pane(...) { /∗ A simple Bloom filter ∗/
Row() row 1; Row() row 2; Row() row 3; ...
}
control SBFilter(...) { /∗ A sliding−window Bloom filter ∗/
/∗ Registers for timing ∗/
Register<...>(...) clear index;
Register<...>(...) timer;
Pane() pane 1; Pane() pane 2; Pane() pane 3; Pane() pane 4; ...
}
Switch(SBFilter()) main; /∗ SBFilter is instantiated here ∗/
Figure 2.1: Example of instantiation
packet. The main benefit of introducing this phase distinction is to separate two
kinds of computation. The instantiation phase needs to handle higher-order objects,
but they are fully determined by the P4 program and independent from the packets
and the switch configuration from the control plane. The execution phase processes
the packets without higher-order objects and object reallocation.
Similar design choices have also been discussed for “instantiation” in other pro-
gramming languages, such as the ML language. ML compilers handle modules and
functors either by closure passing [29] or by defunctorization [8] (i.e. instantiation at
first during compilation). The former is similar to Petr4’s approach and the latter is
similar to ours. The semantics of ML is usually defined by closure passing. It seems
to be because the first a few ML compilers used closure passing and because the
instantiation phase seems to be more complicated for ML than P4. The advantage of
using closure passing in compilers is that a functor in ML can be compiled just once
32

into machine code that serves for all of its instances. But program analysis is easier
after instantiation in ML [8], which is the same as we observe for P4.
Although P4 compilers create a copy of code for each instance, it is not an ideal
approach for the formal semantics, because that means we cannot analyze shared
properties for all the instances of the same class. So, instead, we store the class
name for each instance as the link to the corresponding code. Meanwhile, the formal
semantics should be simple and independent from any hardware architecture, so the
objects (i.e. instances) should be still addressed by names unrelated to hardware
resource allocation. The control plane names described in the P4 Specification [12,
Section 18.3] are perfect for distinguishing objects. The control plane names are fully
qualified names (paths) allocated as follows.
1. The control plane names of an object instantiated at the top level are just its
name. For example, the control plane name of Switch(SBFilter()) main is main.
2. An object instantiated by nameless instantiation (i.e. directly used as a construc-
tor argument when instantiating another object) gets its control plane name by
appending the name of the corresponding formal parameter after the control
plane name of the object to which the parameter is passed, separated by a dot.
For example, the control plane name of SBFilter() in Switch(SBFilter()) main is
main.ig, as ig is the formal parameter’s name.
3. An object instantiated inside a parser/control block gets its control plane name
by appending its local name after the control plane name of the parser/control
block, separated by a dot. For example, if the control plane name of the SBFilter
instance is main.ig, then the control plane name of Pane() pane 1 in this instance
is main.ig.pane 1.
4. P4 allows using @name annotation to overwrite the local names when generating
control plane names as above. This feature is not yet supported in this work.
33
This allocation guarantees the control plane names are distinct, because the local
names are distinct (including parameters and local definitions). These names are
determined at compile time and can be used to describe how the switch or the control
plane handles these objects (e.g. the control plane may modify registers and table
entries). Also, this allocation forms a hierarchy in which all the objects instantiated
in an instance (e.g. an SBFilter) have the same prefix, and the suffix of these objects
are the same between different instances of the same parser/control block. This
benefit will be discussed in more detail in Chapter 3.
Technically, the instantiation phase produces a global environment Γ that does
not change during the execution phase. Γ consists of six parts:
• Γ
func
, for function definitions (including all callable objects, e.g. parsers, control
blocks and tables),
• Γ
typ
, for type definitions,
• Γ
senum
, for values of serializable enumeration types looked up by member names,
• Γ
inst
, for class information of instances and references to other instances,
• Γ
const
, for values of constants which may differ between instances, and,
• Γ
ext
, for static information of extern objects.
Γ
func
, Γ
typ
, and Γ
senum
are obtained from a single pass through the program, which
is simple Γ
inst
is the main product of the instantiation phase, while Γ
const
and Γ
ext
are
byproducts during this procedure. Another byproduct is the initial state of extern
objects before processing any packets, denoted by s
init
. Γ
inst
is a partial map Path ⇀
Ident × Path that is used to look up object references. For local name bar in an
object at path foo, Γ
inst
(foo.bar) will be used. Entry p 7→ (n, q) in Γ
inst
means the
object referred by p belongs to the class named n and its actual location is q. Because
q is already the actual location, Γ
inst
always has q 7→ (n, q).
34

global Γ
inst
, Γ
const
, Γ
ext
, s
init
, decl env := []
procedure instantiate(p, e, decl) :=
inst name := decl.name
class name := decl.class name
p
inst
:= p · inst name
e
0
:= e
for each param in decl.params
p
param
:= p
inst
· (param.name)
if param is an instantiation
instantiate(p
inst
, e
0
, declaration form of param)
v := (param.class name, p
param
)
else // param is not an instantiation
// param may evaluate to either a value or an object reference
v := evaluate(e
0
, param)
e := e[param.name 7→ v]
if v is a value
Γ
const
:= Γ
const
[p
param
7→ v]
else
Γ
inst
:= Γ
inst
[p
param
7→ v]
body := decl
env[class name]
Γ
inst
:= Γ
inst
[p
inst
7→ (class name, p
inst
)]
if class name is an extern object class
(v
inv
, v
init
) := construct extern(class name, e)
Γ
ext
:= Γ
ext
[p
inst
7→ v
inv
]
s
init
:= s
init
[p
inst
7→ v
init
]
else // class
name is a parser/control block
for each decl
′
in body
if decl
′
is an instantiation then
instantiate(p
inst
, e, decl
′
)
update e, Γ
const
, Γ
inst
(similar to evaluating parameters)
procedure instantiate prog(prog) :=
e := []
for each decl in prog
if decl is a class then
decl env := decl env(decl.name 7→ decl)
else if decl is an instantiation then
instantiate(ε, e, decl)
e := e[decl.name 7→ (value of the instance)]
Figure 2.2: Pseudocode of instantiation
35

Figure 2.2 shows the pseudocode of the instantiation phase. The operator “·”
(centered dot) is used for concatenating paths. All global variables are initialized as
empty maps. decl env stores declarations of classes. These classes must be declared at
the top level, so there is no need to consider naming scope, and it is fine to use a global
decl env in the pseudocode. But in the Coq implementation, in order to rule out circu-
lar instantiation and guarantee that the instantiation phase terminates, declarations
are stored into decl env as closures: decl env := decl env[decl.name 7→ (decl env, decl)].
The corresponding decl env is used when instantiating the body of each declaration,
so every recursive call of instantiate decreases on decl env. The function instantiate
takes a declaration decl that instantiates an object and the declaration appears in an
object at path p. Local environment e is only used in the instantiation phase. The
path for the newly instantiated object will be p
inst
. The first loop evaluates each pa-
rameter of decl. If a parameter is an instantiation expression, it will be converted to
a declaration named by the name of the corresponding formal parameter. Then this
declaration is instantiated recursively under p
inst
, and it becomes an object of class
param.class name at path p
param
. If the parameter is not an instantiation, it will be
evaluated while the names will be looked up in e
0
. The result v will be stored in e and
in Γ
const
or Γ
inst
depending on whether it is an value or a reference. After evaluating
and instantiating the parameters, the body of decl will be instantiated. If it is an
extern object, the architecture-specific function construct extern is called to produce
the static value (e.g. the size and width of a register) and the initial value. Otherwise,
decl is a parser/control block. In this case, for each decl
′
that is an instantiation, call
instantiate recursively.
The procedure instantiate prog instantiates the whole program. It inserts class
definitions into decl env and calls instantiate with an empty path for each top level
instantiation.
36
2.2.1 Function lookup
The instantiation phase makes the resolution of program constructs independent from
runtime data. Besides the global environment Γ, we only need to know the path of the
current control/parser instance, denoted as p. We will show the detailed resolution
methods in Section 2.3. Here we show the most important part: function lookup.
The judgment of function lookup is of the form
Γ, p ⊢ exp ⇓
lookup
(p
′
, p
func
),
where exp is the function expression, and (p
′
, p
func
) is the result. In the result, p
′
is
either ⋆ or a path: If p
′
is ⋆, the function exp is executed in the current control/parser
instance, such as calling a table or an action defined in the same control block; If p
′
is a path, the function exp is executed in the instance at p
′
, such as calling a global
action/function or another control/parser instance. The difference is that the callee
can access class-scope variables of the caller if and only if p
′
= ⋆. The other part of
the lookup result, p
func
, is the path to look up the function body of exp in Γ
func
.
Figure 2.3 presents the semantic rules for function lookup. The first two rules
handle the case that the function expression is an identifier, and the last three rules
handle the case that the function expression is a member expression (expression with
a dot). We distinguish the origin of identifiers using locators, which annotate the
identifiers in the form n@loc. E-LGlob is used for global actions and functions. E-
LInst is used for local actions and parser states, which are modeled as functions. The
premise Γ
inst
(p) = (n
class
, p) indicates that the current instance p is an instance of class
n
class
. E-LTable is used for calling apply method of tables. We use kind(n
1
@(inst p
′
))
to denote the determination of whether the expression is a table, using the type
annotation generated by the front end (Section 2.1). Tables can access control block’s
local variables, so the first lookup result is ⋆. In the last two rules, E-LMemGlob
37

Γ, p ⊢ n@(glob p
′
) ⇓
lookup
(ε, p
′
)
E-LGlob
Γ
inst
(p) = (n
class
, p)
Γ, p ⊢ n@(inst p
′
) ⇓
lookup
(⋆, n
class
.p
′
)
E-LInst
kind(n
1
@(inst p
′
)) = table Γ
inst
(p) = (n
class
, p)
Γ, p ⊢ n
1
@(inst p
′
).n
2
⇓
lookup
(⋆, n
class
.p
′
.n
2
)
E-LTable
kind(n
1
@(glob p
2
)) ̸= table Γ
inst
(p
2
) = (n
class
, p
3
)
Γ, p
1
⊢ n
1
@(glob p
2
).n
2
⇓
lookup
(p
3
, n
class
.n
2
)
E-LMemGlob
kind(n
1
@(inst p
2
)) ̸= table Γ
inst
(p
1
.p
2
) = (n
class
, p
3
)
Γ, p
1
⊢ n
1
@(inst p
2
).n
2
⇓
lookup
(p
3
, n
class
.n
2
)
E-LMemInst
Figure 2.3: Semantics rules for function lookup
and E-LMemInst, the method name n
2
is prepended with the class name n
class
,
which determined by the locator annotated to n
1
.
The function lookup is fully deterministic and implemented as a function in the
mechanized semantics. This function is used in the same way in the program logic
(Section 3.2), making it an important benefit of the instantiation phase.
2.2.2 Abstract methods
An important feature that has not been formalized previously (including Petr4’s im-
plementation) is abstract methods. Formalizing abstract methods is necessary for
verifying stateful programs on Tofino. An abstract method is a short P4 program
segment provided to an extern object to customize its behavior. The extern object’s
internal logic may call these abstract methods. The syntax of abstract methods is
38
Register<bit<32>, bit<16>>(32w65536, 0) reg;
RegisterAction<bit<32>, bit<16>, bit<32>>(reg) regact = {
void apply(inout bit<32> value, out bit<32> rv) {
rv = value;
if (value == N − 1) {
value = 0;
}
else {
value = value + 1;
}
}
};
...
regact.execute(0);
Figure 2.4: An example of abstract method
similar to object-oriented languages. The extern object classes defined by the architec-
ture may declare abstract methods and the abstract methods must be implemented
for each instance during instantiation.
Abstract methods are necessary in P4 for at least one reason: on Tofino, each
register is allocated in a pipeline stage, so it can be only accessed once per packet
(unless recirculating, which is costly). So any read-then-write operation (such as in-
crementing a register cell) must be done in a single operation. The abstract method
provides an interface that allows the programmer to specify how the value to write
is computed from the original value. Figure 2.4 shows an example that uses abstract
method to read and then update a register in the Tofino architecture. reg is a register
and regact defines an action that modifies reg’s value. apply is an abstract method,
whose prototype is defined in the extern type RegisterAction and whose implemen-
tation for regact is as shown in Figure 2.4. Later, the P4 program may use, e.g.,
regact.execute(0) to update the 0-th cell’s value. Inside the execute method, the ab-
stract method apply will be invoked and the old value of the 0-th cell will be passed
in as value while value after the function call will be written into the 0-th cell.
39
The P4 specification only allows abstract methods to “use the supplied arguments
or refer to values that are in the top-level scope” [12]. Since it is independent from
any local variable, the semantics of an abstract method can be represented by a
relation of initial extern state, list of input arguments, final extern state, list of output
arguments, and signal. This relation is determined during instantiation from the
semantics of normal functions and statements and stored in Γ
ext
as a constant data
of the extern object.
The Tofino architecture allows more general forms of abstract methods. For ex-
ample, abstract methods with @synchronous annotation may access local variables.
This feature is nonstandard P4, in that it has not been accepted by the P4 Lan-
guage Consortium. The formalization of more general abstract methods will require
investigation in more applications.
2.3 Execution phase
The instantiation phase generates the static global environment Γ. Then the execu-
tion phase executes the program according to Γ. Because P4 programs do not have
loops and recursions, it is not necessary to consider nonterminating programs. So the
execution phase is defined as a big-step operational semantics. The basic expressions
and statements are treated similarly as in Petr4. The most important difference is
the treatment of uninitialized bits.
2.3.1 Uninitialized bits
Unlike C, where reading an uninitialized variable may cause undefined behavior, the
P4 Specification states such read yields an unspecified value, including reading an
uninitialized variable and reading a field of an invalid header [12, Section 8.23]. Also,
40
bit<8> x, y, z;
y = x;
z = x; /∗ z may differ from y ∗/
reading twice may yield different values. The following program gives an example.
So it is not enough to characterize P4’s behavior by assigning an arbitrary value
when a variable is uninitialized. Further, P4 supports bit access, e.g. x[5:2] = y,
so each bit is virtually a field and has its own initialized-or-not status. Therefore
in the operational semantics, we consider that each bit in storage can be either 0,
1, or uninitialized, represented by 0, 1, ⊥. A value with such three-valued bits is
called a storable value. When a variable is declared without initialization, a storable
value filled with ⊥ is stored, unless the P4 Specification specifies something different
in particular. For example, the validity bit of a uninitialized header is 0 (invalid),
not ⊥. On the other hand, the result of any expression evaluation, including single-
variable expressions, is a normal value without uninitialized bits. So storable values
are first converted to normal values nondeterministically when used in an expression,
including being used as operands of arithmetic operations or the right-hand side of
an assignment and being passed as arguments. When storing an evaluation result, it
is converted to a storable value without uninitialized bits. For example,
bit<8> x, y, z, w;
y = x; /∗ The storable value is converted to normal value before writing into y ∗/
z = y;
w = y; /∗ w and z must be the same ∗/
2.3.2 Nondeterministic semantics
Because storable values need to be converted to normal values nondeterministically,
P4’s semantics is nondeterministic. Consider an abstract semantic judgment a ⇓ b,
41

where a is the input and b is the output. For example, a may be a program statement
and the initial state while b may be the final state of executing the statement. In
a nondeterministic semantics, a ⇓ b means a possible result of executing a is b, and
a ⇓ b
1
, a ⇓ b
2
, a ⇓ b
3
may be all valid judgments. If a ⇓ b does not hold for any b,
a cannot be executed at all, instead of undefined behavior. Correctness of compiling
source program a into target program a
′
is that any behavior of a
′
is a valid behavior
of a: ∀b, a
′
⇓ b =⇒ a ⇓ b.
4
When proving program a satisfies some property P , the
formalization is ∀b. a ⇓ b =⇒ P (b), which reads as every possible result b satisfies
P .
2.3.3 Semantic rules
The syntax of values and l-values is as follows:
Value := BasicValue (e.g. signed/unsigned integers and Booleans)
| List(Ident × Value) (structs)
| Bool × List(Ident × Value) (headers; Boolean is the validity bit)
| · · · (other values not used in this thesis)
Lvalue := Path (local variable)
| Lvalue × Ident (field of a struct, header, or union)
| Lvalue × Int × Int (bit-slice)
| · · · (other l-values not used in this thesis)
Values include basic values, structs, and headers, but unlike previous work [18], we do
not use closures. L-values are assignable variables or fields, including local variables,
fields, and bit-slices. There are some more kinds of values and l-values, but they are
4
The target program does not need to exhibit every possibility of the source program. It only
needs to be within the possible execution of the source program.
42
not interesting enough to be covered in the thesis. The program state, usually denoted
by s, consists of two parts: a stack frame for local variables within a control/parser
block, and an extern state for extern objects.
StackFrame := Path ⇀ Value
ExternState := Path ⇀ ExternObject
State := StackFrame × ExternState
extern objects are as defined by the architecture. A table whose entries can be con-
figured by the control plane is also considered as an extern object, because they are
accessible from the outside of the P4 program.
Let Γ be the global static environment generated in Section 2.2. As P4 program
statements are mostly inside classes (i.e. parsers and control blocks) and the instan-
tiation phase does not duplicate the program for each instance, we need to know
in which instance the current statement is executed in order to correctly interpret
names. So we use a path p to indicate the path of the object that the program is
currently in (p is an empty path if not in any object). Names are handled using p
and locators (generated in Section 2.1). Local variables are always defined in classes,
therefore a name referring to a local variable always has a locator of the form inst p
′
:
they are looked up in the stack frame using p
′
. A new empty stack frame will be
used when calling a method in a different instance, since stack frames are not shared
between different instances, and the old stack frame will be reused when returning
from the call, so scope of local variables is resolved. A name referring to an instance
may have a locator of the form glob p
′
or inst p
′
. In the first case, it will be looked
up in Γ
inst
using p
′
, and in the second case, it will be looked up in Γ
inst
using p · p
′
,
because p
′
is the relative path from the current path p.
43

We adopt the following notations in the semantic rules. We use italic font for vari-
ables, such as exp for an expression and stmt for a statement, and use sans serif font
for constants, such as normal and return for signals. We use [v]
sv
to denote convert-
ing a normal value v to a storable value, and use [v]
v
to denote nondeterministically
converting a storable value to a normal value. Overline is used to indicate a list of
items, such as v.
The big-step semantic judgments are written as six auxiliary judgments
s ⊢ lv ⇓
read
v (l-value read, 6 rules)
s ⊢ lv := v ⇓
write
s
′
(l-value write, 9 rules)
Γ, p, s ⊢ exp ⇓ v (expression, 18 rules)
Γ, p, s ⊢ exp ⇓ (lv, sig) (l-expression, 5 rules)
Γ, p, s ⊢ (d, exp) ⇓ (v, lv ) (argument list, 5 rules)
Γ, p ⊢ exp ⇓
lookup
(p
′
, p
func
) (function lookup, 5 rules)
and three main judgments
Γ, p, s ⊢ stmt ⇓ (s
′
, sig) (statement, 16 rules)
Γ, p, s ⊢ exp ⇓ (s
′
, sig) (call-expression, 2 rules)
Γ, p, s ⊢ (f, v
in
) ⇓ (s
′
, v
out
, sig) (function, 3 rules)
For example, the judgment Γ, p, s ⊢ e ⇓ v reads as “in global environment Γ, with
object path p, in state s, the P4 expression e evaluates to value v.” Judgment
Γ, p, s ⊢ stmt ⇓ (s
′
, sig) reads as “for Γ and p, from state s, the execution of the P4
statement stmt results in state s
′
and signal sig.” Signal is used to mark control flow
in the conventional way to handle return and exit statements versus normal control
flow. Call-expressions are treated as a separated judgment for convenience. They are
44

Γ, p, s ⊢ x@(inst p
′
) ⇓ (p
′
, normal)
E-LVar
Γ, p, s ⊢ exp ⇓ (lv, sig)
Γ, p, s ⊢ exp.n ⇓ ((lv, n), sig)
E-LMember
s
local
(p) = v
(s
local
, s
extern
) ⊢ p ⇓
read
v
E-RVar
s ⊢ lv ⇓
read
[. . . , (n, v
′
), . . . ]
s ⊢ (lv, n) ⇓
read
v
′
E-RStruct
s ⊢ lv ⇓
read
(valid := , [. . . , (n, v
′
), . . . ])
s ⊢ (lv, n) ⇓
read
v
′
E-RHeader
(s
local
, s
extern
) ⊢ p := v ⇓
write
(s
local
[p 7→ v], s
extern
)
E-WVar
s ⊢ lv ⇓
read
[. . . , (n, ), . . . ] s ⊢ lv := [. . . , (n, v), . . . ] ⇓
write
s
′
s ⊢ (lv, n) := v ⇓
write
s
′
E-WStruct
s ⊢ lv ⇓
read
(valid := 1, [. . . , (n, ), . . . ])
s ⊢ lv := (valid := 1, [. . . , (n, v), . . . ]) ⇓
write
s
′
s ⊢ (lv, n) := v ⇓
write
s
′
E-WHeader1
s ⊢ lv ⇓
read
(valid := b, [. . . , (n, ), . . . ]) b ∈ {0, ⊥}
s ⊢ (lv, n) := v ⇓
write
s
E-WHeader0
Figure 2.5: L-value evaluation, read and write rules of P4light
used not only in statements with function calls but also in tables. Tables are treated
as functions that first evaluate keys and match them with a table entry, followed by
constructing and executing a call-expression from the matched table entry.
Figure 2.5 shows selected rules for evaluating, reading and writing l-values. Rules
E-LVar and E-LMember evaluate l-expressions based on locators. Rules E-RVar
and E-WVar are the base cases in which the l-value is just a path of a local variable,
so it is directly read from or write to s
local
. E-RStruct (E-RHeader, resp.) reads
a field from a struct (header, resp.). E-WStruct writes to a field of a struct. E-
45

Γ, p, s ⊢ exp ⇓ v
Γ, p, s ⊢ (in, exp) ⇓ ([v]
sv
, )
E-ArgIn
Γ, p, s ⊢ exp ⇓ (lv, normal)
Γ, p, s ⊢ (out, exp) ⇓ ( , lv)
E-ArgOut
Γ, p, s ⊢ exp ⇓ (lv, normal) s ⊢ lv ⇓
read
v
Γ, p, s ⊢ (out, exp) ⇓ ([[v]
v
]
sv
, lv)
E-ArgInOut
Figure 2.6: Semantics rules for argument evaluation
WHeader1 and E-WHeader0 define the semantics of writing to a header field.
The write operation only takes effect when the validity bit of the header is 1 (i.e. the
header is valid), in accordance with the P4 Specification [12, Section 8.23].
It is worth noticing that the rule E-RHeader ignores the header’s validity bit. If
the validity bit is 1, it reads the field as expected. If the validity bit is 0 or ⊥, it still
works because we designed the semantics to maintain an invariant that all the bits
of the header’s fields are ⊥ if the validity bit is 0 or ⊥. So reading from an invalid
header according to the rule E-RHeader will yield ⊥s, precisely following the P4
Specification.
Figure 2.6 displays the rules for argument evaluation. Each argument is evaluated
to a pair of a storable value and an l-value. Either part of the pair might be empty,
denoted by “ ”. Rules are presented for a single argument, and its lifting to multiple
arguments is conventional. Handling of nonnormal signals in l-value evaluation is
omitted. The rule E-ArgIn evaluates an in parameter to the storable value corre-
sponding to v, and the l-value part is empty. Similarly, the rule E-ArgOut evaluates
an out parameter, and the result is only an l-value. The rule E-ArgInOut evaluates
an inout parameter. The semantic rules for argument evaluation is essentially the
same as Petr4’s copy-in and copy-out rules, except handling nondeterministic bits.
But we prefer calling them “argument evaluation”, because copy-in and copy-out
happen during argument passing, not argument evaluation. (see E-CallFunc rules
and E-Internal)
46
Γ, p, s ⊢ stmt
1
⇓ (s
′
, normal) Γ, p, s
′
⊢ stmt
2
⇓ (s
′′
, sig)
Γ, p, s ⊢ stmt
1
; stmt
2
⇓ (s
′′
, sig)
E-Seq
Γ, p, s ⊢ stmt
1
⇓ (s
′
, sig) sig ̸= normal
Γ, p, s ⊢ stmt
1
; stmt
2
⇓ (s
′
, sig)
E-Seq2
Γ, p, s ⊢ exp ⇓ true Γ, p, s ⊢ stmt
1
⇓ (s
′
, sig)
Γ, p, s ⊢ if (exp) stmt
1
else stmt
2
⇓ (s
′
, sig)
E-IfT
Γ, p, s ⊢ exp ⇓ false Γ, p, s ⊢ stmt
2
⇓ (s
′
, sig)
Γ, p, s ⊢ if (exp) stmt
1
else stmt
2
⇓ (s
′
, sig)
E-IfF
Γ, p, s ⊢ exp ⇓ v
Γ, p, s ⊢ return exp ⇓ (s, return v)
E-Return
kind(exp
2
) = expr Γ, p, s ⊢ exp
1
⇓ (lv, normal)
Γ, p, s ⊢ exp
2
⇓ v s ⊢ lv := [v]
sv
⇓
write
s
′
Γ, p, s ⊢ exp
1
:= exp
2
⇓ (s
′
, normal)
E-Assign
Γ, p, s ⊢ exp
1
⇓ (lv, normal)
Γ, p, s ⊢ exp
2
(exp
3
) ⇓ (s
′
, return v) s
′
⊢ lv := [v]
sv
⇓ s
′′
Γ, p, s ⊢ exp
1
:= exp
2
(exp
3
) ⇓ (s
′′
, normal)
E-AssignCall
Figure 2.7: Semantics rules for statements
The selected semantics rules for statements are shown in Figure 2.7. These rules
are mostly standard. In the rule E-Seq, the execution continues to stmt
2
if the signal
from stmt
1
is normal. In the rule E-Seq2, stmt
2
is skipped as stmt
1
has changed
the normal control flow: e.g., the signal will be “return v” if stmt
1
executes a return
statement. The rules E-IfT and E-IfF handle if-statements. The rule E-Return
handles return statements. The rule E-Assign handles simple assignment statements
without function calls. The rule E-AssignCall handles statements with function
calls.
Figure 2.8 shows the rules for function call expressions. E-CallBuiltin handles
built-in function calls, e.g. h.setValid(), where h is a header. Normal function calls are
47

kind(exp
1
.n) = builtin
Γ, p, s ⊢ exp
1
⇓ (lv, normal) d = dirs(exp
1
.n)
Γ, p, s ⊢ (d, exp
2
) ⇓ (v, lv
′
) Γ, p, s ⊢ (lv, n, v) ⇓
builtin
(s
′
, sig)
Γ, p, s ⊢ exp
1
.n(exp
2
) ⇓ (s
′
, sig)
E-CallBuiltin
kind(exp
1
) = func Γ, p ⊢ exp
1
⇓
lookup
(⋆, p
func
)
f = Γ
func
(p
func
) d = dirs(exp
1
) Γ, p, s ⊢ (d, exp
2
) ⇓ (v, lv)
Γ, p, s ⊢ (f, v) ⇓ (s
′
, v
′
, sig) s
′
⊢ lv := v
′
⇓
write
s
′′
Γ, p, s ⊢ exp
1
(exp
2
) ⇓ (s
′′
, sig)
E-CallFunc1
kind(exp
1
) = func Γ, p ⊢ exp
1
⇓
lookup
(p
′
, p
func
)
f = Γ
func
(p
func
) d = dirs(exp
1
) Γ, p, s ⊢ (d, exp
2
) ⇓ (v, lv)
Γ, p
′
, ([], s
extern
) ⊢ (f, v) ⇓ (( , s
′
extern
), v
′
, sig)
(s
local
, s
′
extern
) ⊢ lv := v
′
⇓
write
s
′′
Γ, p, (s
local
, s
extern
) ⊢ exp
1
(exp
2
) ⇓ (s
′′
, sig)
E-CallFunc2
Figure 2.8: Semantics rules for function call expressions
handled by E-CallFunc1 and E-CallFunc2. These two rules are applied based
on the function lookup result in Section 2.2.1, which are Γ, p ⊢ exp
1
⇓
lookup
(⋆, p
func
)
and Γ, p ⊢ exp
1
⇓
lookup
(p
′
, p
func
), respectively. In E-CallFunc1, the function body
is executed in the same path p and the same state s. In E-CallFunc2, the function
body is executed in path p
′
and local variables are cleared in the state, and the
original local variables, stored in s
local
, are unchanged until copying the out parameters
as (s
local
, s
′
extern
) ⊢ lv := v
′
⇓
write
s
′′
. In both E-CallFunc1 and E-CallFunc2,
direction information of the arguments, d, is extracted from the type annotation of
the function expression exp
1
. We assume the argument evaluation result, (v, lv),
is automatically split into two lists, v and lv, such that v contains in and inout
parameters, and lv contains out and inout parameters.
Figure 2.9 shows the rules for functions. E-Internal is for normal P4 functions.
At the beginning, the in parameters are “copied in” using l-value write. Because the
parameter names are annotated with locators, there no concern of scope. At the end,
48

s ⊢ p
in
:= v
in
⇓
write
s
′
Γ, p, s
′
⊢ stmt ⇓ (s
′′
, return v) s
′′
⊢ p
out
⇓
read
v
out
Γ, p, s ⊢ (internal (p
in
, p
out
, stmt), v
in
) ⇓ (s
′
, v
out
, return v)
E-Internal
Γ, p, s ⊢ key ⇓ v C(p · n) = entry (v, kind, entry) ⇓
match
n
′
(exp
2
)
action = [. . . , n
′
(exp
1
), . . . ] Γ, p, s ⊢ n
′
(exp
1
, exp
2
) ⇓ (s
′
, return null)
Γ, p, s ⊢ (table (n, key, kind, action), []) ⇓ (s
′
, [], null)
E-Table
Figure 2.9: Semantics rules for functions
the out parameters are “copied out” as l-value read. E-Table is the more interesting
rule, which is for tables. The function body of a table essentially has four fields:
• n, the local name of the table;
• key, the keys, which is a list of expressions;
• kind, a list of match kinds of the same length as key;
• action, a list actions pending to be called based on table matching result.
Table evaluation first evaluates key into values, v. The condition C(p · n) = entry
means retrieving table entries from control plane information, denoted by C, using
the table’s fully qualified name p · n. Then, (v, kind, entry) ⇓
match
n
′
(exp
2
) indicates
the procedure of finding the matching entry n
′
(exp
2
) of v in entry. This procedure is
primarily determined by the architecture, because the architecture may define custom
match kinds. Then, the rule finds the corresponding action n
′
(exp
1
) in action. The
arguments exp
1
and exp
2
are combined together in order to execute the action.
In this presentation of the E-Table rule, certain technical details have been
omitted. First, a table has its return value that enables the retrieval of the matched
action after the table.apply(). The expression of E-Table ignores this complexity
and returns null. Second, instead of having entries determined by the control plane,
there is another kind of table whose entries are hardcoded in the P4 program. These
tables do not need the step C(p · n) = entry.
49
2.4 Comparison with Petr4
This section compares our semantics with Petr4’s [18] semantics and explains our
design choices. Petr4 was the first formal semantics for P4. It gave two representations
of the P4 semantics: one is called Core P4, for a subset of P4 with formal semantics
and pen-and-paper soundness proof; the other is the interpreter, which is an OCaml
program and supports almost all P4 features such as parsers and extern functions and
objects.
Figure 2.10 shows the semantic rules handling objects in Petr4’s Core P4 seman-
tics. It is adapted for better presentation: first, it is simplified by removing support
for the features that are not related to the comparison; second, Petr4’s Core P4 se-
mantics does not include extern objects, so we extracted the semantic rules for extern
objects from Petr4’s interpreter and added to Figure 2.10.
Petr4’s Core P4 semantics uses closures intensively to handle function-like objects
with local scopes in P4, so it is in a more standard way of defining semantics. But since
P4’s scopes are statically allocated, we find that defining the semantics based on the
phase distinction is more convenient for program reasoning, as we will demonstrate
in Example 2.1.
In Petr4 semantics, statements and declarations are treated similarly without
phase distinction, so here we consider both kinds as statements. The form of semantic
judgment is
⟨C, ∆, σ, ϵ, stmt⟩ ⇓ ⟨∆
′
, σ
′
, ϵ
′
, sig⟩,
where σ is a global storage that maps locations to values, ϵ is a local environment
that maps currently visible names to locations. Locations are allocated dynamically.
The judgment ℓ fresh is used to obtain a previously not used location ℓ.
The states of extern objects are persistent between packets, unless the switch
specification resets them outside of the P4 program. So in order to make sure extern
50

E-CtrlDecl
ℓ fresh val = cclos(ϵ, ctrl(d x : τ)(x
c
: τ
c
) {decl stmt})
⟨C, ∆, σ, ϵ, ctrl X(d x : τ)(x
c
: τ
c
) {decl stmt}⟩ ⇓ ⟨∆, σ[ℓ 7→ val], ϵ[X 7→ ℓ], normal⟩
E-CtrlInst
⟨C, ∆, σ, ϵ, X⟩ ⇓ ⟨σ
1
, cclos(ϵ
cc
, ctrl(d x : τ )(x
c
: τ
c
) {decl stmt})⟩
ϵ(path) = p ⟨C, ∆, σ
1
, ϵ, exp⟩ ⇓ ⟨σ
2
, val
c
⟩
ℓ
c
, ℓ fresh val = clos(ϵ
cc
[path 7→ p.x][x
c
7→ ℓ
c
], d x : τ , {}, {decl stmt})
⟨C, ∆, σ, ϵ, X(exp) x⟩ ⇓ ⟨∆, σ
2
[ℓ
c
7→ val
c
][ℓ 7→ val], ϵ[x 7→ ℓ], normal⟩
E-ExtnInst1
⟨C, ∆, σ, ϵ, X⟩ ⇓ ⟨σ
1
, extern Y ⟩ ϵ(path) = p
(p.x 7→ ) /∈ σ
1
⟨C, ∆, σ
1
, ϵ, exp⟩ ⇓ ⟨σ
2
, val
c
⟩ ⟨C, Y, val
c
⟩ ⇓
extern
val
⟨C, ∆, σ, ϵ, X(exp) x⟩ ⇓ ⟨∆, σ
2
[p.x 7→ val], ϵ[x 7→ p.x], normal⟩
E-ExtnInst2
⟨C, ∆, σ, ϵ, X⟩ ⇓ ⟨σ
1
, extern Y ⟩ ϵ(path) = p (p.x 7→ ) ∈ σ
1
⟨C, ∆, σ, ϵ, X(exp) x⟩ ⇓ ⟨∆, σ
1
, ϵ[x 7→ p.x], normal⟩
Figure 2.10: Petr4’s Core P4 semantic rules for objects (simplified for demonstration)
objects are always allocated to the same locations, their control plane names are
used as their locations, which are computed rather than arbitrarily allocated. These
names, if computed correctly, are exactly the paths that we use in our semantics (see
Section 2.2). Together with internal locations allocated during execution, they make
up locations in this version of Petr4 semantics. In order to maintain these names
without introducing a new context in the semantic judgment, a special field called
path is added to the environment ϵ (as shown in Figure 2.10).
Rule E-CtrlDecl means, when evaluating a control declaration, the semantics
allocates a fresh location ℓ and stores the declaration into ℓ as a closure with the
current local environment ϵ. Rule E-CtrlInst evaluates a control instantiation. It
first retrieves the closure from the environment and the storage, followed by find-
51

ing p, which is the path of the current environment, and evaluating the constructor
arguments exp.
Fresh locations ℓ
c
are allocated for the constructor arguments, and fresh location
ℓ is for the control instance. Then the closure val representing the control instance
is created by binding the parameter names to locations ℓ
c
and path to p.x, which is
the path of the control instance, respectively. Finally, the constructor arguments are
stored in fresh locations ℓ
c
and val is stored in ℓ. In our semantics, these two rules are
handled by the instantiation phase without dynamic allocation or closure passing.
For extern object instantiation, Petr4 semantics needs to consider whether the
object has already been initialized. If it has not been initialized, the rule ExtnInst1
is applied. In ExtnInst1, ⟨C, ∆, σ, ϵ, X⟩ ⇓ ⟨σ
1
, extern Y ⟩ means evaluating the
name X gives an extern object class Y . It finds the path p of the current environment
and tests p.x is uninitialized. Then ⟨C, Y,
val
c
⟩ ⇓
extern
val means according to the
architecture, initializing an extern object of class Y with parameters val
c
gives val. In
this rule, the location for the new instance is given by p.x instead of allocating a fresh
one. Otherwise, the rule ExtnInst2 will be applied. In ExtnInst2, p.x is already
in σ so already initialized, therefore the value from previous packet processing should
be used without reinitialization. In our semantics, extern objects are allocated in the
instantiation phase, so there is no need to consider whether an object is initialized or
not.
Another comparison between Petr4 and our semantics is on location manipulation,
as shown in Figure 2.11. The two E-VarAssign rules handle exactly the same
assignment statement whose left hand formula is just a variable.
5
For assignment
x := exp, Petr4 semantics needs to first looks up in the environment ϵ to find ℓ
before writing into it. In contrast, our semantics is facilitated with the locator, and
5
They are special cases of the complete assignment rules. For example, E-VarAssign in this
thesis is derived from E-Assign, E-LVar, and E-WVar. These simple rules are more accessible
for comparison.
52

E-VarAssign (Petr4)
ϵ(x) = ℓ ⟨C, ∆, σ, ϵ, exp⟩ ⇓ ⟨val⟩
⟨C, ∆, σ, ϵ, x := exp⟩ ⇓ ⟨∆, σ[ℓ 7→ val], ϵ, normal⟩
E-VarAssign (This thesis)
Γ, p, (s
local
, s
extern
) ⊢ exp ⇓ val
Γ, p, (s
local
, s
extern
) ⊢ x@(inst p
′
) := exp ⇓ ((s
local
[p
′
7→ val], s
extern
), normal)
Figure 2.11: Comparison with Petr4 on location manipulation
the assignment statement becomes x@(inst p
′
) := exp.
6
So the result is directly
written in p
′
. The same look-up procedure also occurs when evaluating variables in
the expression exp. This significantly reduces the work of designing and proving the
program logic. The following example illustrates how our design facilitates reasoning
about program execution.
Example 2.1. Figure 2.12 shows an example P4 program written in a simplified
version of the V1Model architecture, and whose ingress block gets input a and outputs
x.
In our semantics, the program in Example 2.1 first goes through the instantiation
phase. We get the objects
main.ig 7→ (ctrl MyIngress, main.ig)
main.ig.c1 7→ (ctrl C, main.ig.c1)
main.ig.c2 7→ (ctrl C, main.ig.c2)
main.ig.c1.reg 7→ (register : [8w0])
main.ig.c2.reg 7→ (register : [8w0])
Then the switch starts processing packets. In this procedure, the object structure does
not change—only the values in registers may change and be kept between packets.
6
Variables can only be local, so their locators must be inst p.
53
control C(out bit<8> x) {
register<bit<8>>(1) reg;
apply {
bit<8> y;
reg.read(y, 0);
y = y + 1;
reg.write(0, y);
x = y;
}
}
control MyIngress(in bit<8> a, out bit<8> x) {
C() c1;
C() c2;
apply {
if(a == 0) {
c1.apply(x);
}
c2.apply(x);
}
}
Main(MyIngress()) main;
Figure 2.12: P4 program in Example 2.1
In contrast, Petr4’s semantics uses a special field cnt with initial value 0 in σ to
count the location to allocate. It first loads control definitions into the storage
ϵ = [C 7→ 0; MyIngress 7→ 1]
σ = [cnt 7→ 2; 0 7→ (body of C); 1 7→ (body of MyIngress)].
Petr4’s semantics does not support nameless instantiation MyIngress(), but we can
follow the implementation of the interpreter to see that, after the instantiation of
54

main, the program environment and storage will be
ϵ = [C 7→ 0; MyIngress 7→ 1; main 7→ 3]
ϵ
ig
= [C 7→ 0; path 7→ main.ig]
σ = [cnt 7→ 4; 0, 1 7→ . . . ; 2 7→ (ϵ
ig
, body of MyIngress); 3 7→ package[ig 7→ 2]].
Then the MyIngress control block is executed with actual packet data. It knows
that the closure stored at location 2 should be executed, by looking up ϵ(main) = 3,
σ(3)(ig) = 2. As it is inside MyIngress, ϵ
ig
is used. It starts with instantiating two
instances of C, namely c1 and c2. The rule E-CtrlInst is used and there is
ϵ
ig
= [C 7→ 0; path 7→ main.ig; c1 7→ 4; c2 7→ 5]
ϵ
c1
= [path 7→ main.ig.c1]
ϵ
c2
= [path 7→ main.ig.c2]
σ = [cnt 7→ 6; 0, 1, 2, 3 7→ . . . ; 4 7→ (ϵ
c1
, body of C); 5 7→ (ϵ
c2
, body of C)].
Then the program’s behavior depends on the value of a. If a = 0, then c1 is called
and a fresh location is allocated for x in C. (x is not copied in because it is an out
parameter.
ϵ
c1
= [path 7→ main.ig.c1; x 7→ 6]
σ = [cnt 7→ 7; 0, 1, 2, 3, 4, 5 7→ . . . ; 6 7→
].
Then reg let instantiated and initialized from rule E-ExtnInstInit.
ϵ
c1
= [path 7→ main.ig.c1; x 7→ 6; reg 7→ main.ig.c1.reg]
σ = [cnt 7→ 7; 0, 1, 2, 3, 4, 5, 6 7→ . . . ; main.ig.c1.reg 7→ [0]].
55
Then, the rest of C is executed:
ϵ
c1
= [path 7→ main.ig.c1; x 7→ 6; reg 7→ main.ig.c1.reg; y 7→ 7]
σ = [cnt 7→ 8; 0, 1, 2, 3, 4, 5 7→ . . . ; 6 7→ 1; 7 7→ 1; main.ig.c1.reg 7→ [1]].
Then x will be copied out and c2 will be executed. In c2, x and y will be allocated
at 8 and 9 respectively. But this allocation depends on the actual data. The case
discussed above is a equals 0. If a is not equal to 0, c1 will not be executed and c2
will start with cnt 7→ 6. x and y will be allocated at 6 and 7 instead.
From this example, we can see that our semantics is much easier to manipulate.
This advantage will be more apparent in the program logic (Chapter 3) and the
verification (Chapter 5). It is also important for proving correctness of a P4 compiler,
which is beyond the scope of this thesis. First, instantiation and execution (pure
data processing) are mixed and executed intermittently in Petr4’s semantics. In
the design of the P4 language, the restrictions are designed to force instantiation to
be done statically and the cost of implementing the program on actual hardware is
determined only by instantiation. So it is better to point out this idea in its formal
semantics.
The second benefit is that locations are statically determined and easy to be sep-
arated in our semantics. Petr4’s semantics allocates fresh locations during execution.
In practice, a counter is used to track the next location to allocate. However, that
means we need to reason about this counter, even as the behavior of the program
is totally irrelevant to the counter. And the locations are, in other words, dynami-
cally allocated pointers, so we need to consider that the locations are nonoverlapping
and constants are never modified when defining the semantics of the program logic
judgments and proving soundness of the logic.
Program analyzers also need to be careful to avoid name capturing. The usage of
locators in our semantics simplifies the variable disambiguation procedure. Context
56
does not change within a control/parser object, so it does not need to be maintained
in the type system, soundness proof, and the analyzer.
Function call interface Finally, there is another difference between Petr4 and our
semantics that is noteworthy but perpendicular with the instantiation-versus-closure
discussion. Function parameters are passed as a list of values in our semantics rather
than a named mapping as in Petr4, because the names of formal parameters are
internal for the callee, so the caller should not refer to these names for copying-
in and copying-out. In particular, control/parser instances may be parameterized
with other control/parser instances as constructor parameters. These host instances
can call these parameter instances or pass them to other instances as constructor
parameters. In either case, only the type signatures of the callees are relevant, not
the names. In modular reasoning, we want to reason about the caller with only the
behavior of the callee but not the implementation, so we want to remove the names
of formal parameters in the semantics of function call.
2.5 Architecture specification
Architecture-specific components are not part of P4’s core semantics, but they are
very important in order to formalize programs’ behavior. The formal specification
of a P4 architecture consists of three parts: the extern objects and methods, table
match kinds, and the switch model. The P4 semantics is parameterized by such an
architecture specification.
The specification of extern objects and methods consists of an initialization
function for each class of objects and an execution relation for each method. The
initialization function is used in the instantiation phase. Its input is a 5-tuple
57

(Γ
ext
, e
extern
, type, p, (p
param
| v
param
)), where Γ
ext
and e
extern
are the static environ-
ment and the dynamic state for extern objects in the ongoing instantiation phase,
respectively. The list of type parameters is denoted as type. The path p indicates
where the extern object is instantiated. The last element, (p
param
| v
param
), is a mixed
list of paths and values, which is the constructor parameters The paths in the list
represent parameters that are objects. The output of the initialization function is a
pair (Γ
′
ext
, e
′
extern
).
The execution relation is used in the execution phase. It is a relation on an 8-tuple
(Γ
ext
, e
extern
, p, type, v
param
, e
′
extern
, v
′
param
, sig),
where Γ
ext
is the static extern environment, p is the path of the extern object, e
extern
is
extern state before the call, type and v
param
are type and in parameters, e
′
extern
is the
extern state after the call, v
′
param
is out parameters, sig is the signal.
An architecture may define custom match kinds, so their interpretation needs to
be specified by the architecture. Technically, it defines a function that takes a list
of values of keys with their match kinds and a list of table entries and returns the
matched table entry.
The switch model is the behavior of the whole switch. P4 programmable hard-
ware consists of P4 programmable components and fixed-function components, and
a P4 program defines the programmable components. But still it is necessary to
define other components and the connection between them. So in an architecture
specification, there is a inductive relation that defines how the architecture execute a
packet. This relation invokes the P4 semantics for the P4 programmable components.
Currently, it only processes one packet at a time without queueing and concurrency.
58
2.6 Implementation
This section briefly describes the implementation of the semantics in this chapter.
P4light and front end The P4light syntax and the front end consist of four parts:
P4light syntax, parser (including lexer) and typechecker (including elaborator), two
transformation passes (as described in Section 2.1), and pretty printer. The P4light
syntax is written in Coq and extracted to OCaml to connect with OCaml code. The
parser and typechecker are written in OCaml. The two transformation passes are
written in Coq and extracted to OCaml, so it is possible to prove their correctness in
the future. The pretty printer is an OCaml program that prints the P4light AST as
Coq source code, in order to handle P4 programs in Coq.
Instantiation The instantiation phase is implemented as a computable function
in Coq. One may use Coq’s built-in Compute mechanism to generate the global
environment.
Execution Normal values and storable values are implemented as a data type pa-
rameterized by different bit representations (bool and option bool, respectively), This
makes some proofs applicable for both representations. The execution phase judg-
ments are defined as (mutually) inductive relations.
Artifact The artifact from this chapter is distributed via a GitHub repository [43].
59

Chapter 3
Program Logic
Program logics, especially Hoare logic and separation logic, are widely used for rea-
soning about imperative programs in languages such as C and Java.
1
In this chapter,
we introduce our “Verifiable P4” program logic for semi-modular verification of P4
control blocks. The basis of Verifiable P4 logic is Hoare logic with function calls [25].
It uses modification sets, as in Dafny [26] and ACSL [14], to track heap-like shared
state between functions. We propose hierarchical extern predicates that provide a bet-
ter encapsulation of state representation and modification sets in P4 control blocks,
utilizing the hierarchical structure of the state as designed in Chapter 2. The syntax
and semantics of function specifications and Hoare triples are based on hierarchical
extern predicates, and then we derive program logic rules from the operational se-
mantics. All the program logic rules are proven sound with respect to the operational
semantics in the Coq proof assistant.
Verifiable P4 logic requires each function to have a function specification in the
same way as many other program logics. Because P4 does not support recursion, the
functions can be proved in the order from the lowest level to the highest level. So an
1
Program logics are not only the standard method for proving functional correctness of imperative
programs, but also the logical basis to justify static analysis algorithms.
60
PATH p, MOD m M
PRE (ARG
⃗
P , MEM
⃗
Q, EXT
⃗
R)
POST (RET v, ARG
⃗
P
′
, MEM
⃗
Q
′
, EXT
⃗
R
′
)
Figure 3.1: Simple form of function specification
environment of function specifications is not necessary in the program logic judgments.
and step-indexing [2] is not needed in the semantics of function specifications.
A simple form of function specification is shown in Figure 3.1. We postpone
detailed explanation until Section 3.2, and only provide an overview to motivate hi-
erarchical predicate. In Figure 3.1, p is the path where the function is executed (the
fully qualified name of the object), which is the same as in the semantics. MOD m M
indicates the sets of local variables and extern objects modified in the function. De-
scribing modified local variables is necessary, because P4 programs have local variables
visible in different functions (actions) in the same class (e.g. a control block, see the
example in Section 3.2). The rest of the function specification is a precondition and
a postcondition. RET v describes the return value. The three remaining parts ARG,
MEM, and EXT are descriptions of in and out arguments, local variables, and extern
objects, respectively.
The extern objects are crucial for stateful applications, and their state is shared
around the whole program. In a function specification, the state of extern objects is
described by EXT
⃗
R, where
⃗
R is a list of hierarchical predicates for extern objects as
defined in Section 3.1. This design allows us to meet two requirements at the same
time: (1) to avoid the difficulty of automating proofs in separation logic, and use
modification set instead to manipulate the predicates, and (2) to still encapsulate the
representation and modification of extern objects inside a control block, which makes
them invisible from outside in the specification, just as they are invisible from outside
in the program. In Section 3.2, we describe the form of function specifications and
program logic rules of our P4 program logic in detail.
61
Verifiable P4 program logic does not handle packet parsers in P4. Parsers have
a different control flow and they are stateless, so it is presumably more suitable for
a different approach of verification. Leapfrog [19] is an automatic verifier for P4
parser equivalence, and it may be extended to more general automatic verification
and verification with soundness proof in the future. So we only focus on control blocks
in the program logic for P4.
3.1 Hierarchical extern predicates
Modularity is just as important in verification as in programming. It saves effort and
enables reusable components. To achieve modularity, we follow the approach used
by most modular verification frameworks, which is using function specifications, each
of which consists of a precondition and a postcondition, to describe a function, in
particular, a control block. As the extern objects in the control block are persistent,
their states need to be maintained in function specifications. However, these extern
objects are invisible from outside of the control block, so we want to encapsulate which
extern objects are used and how they represent the state of the control instance in a
predicate, so that the client of the control block (the code that calls the control block)
can use it modularly (decoupled from its implementation details) and conveniently
(without mentioning each extern object).
Suppose we have a predicate P without its definition and P holds before executing
a program block c. After executing c, whether P still holds or not is unclear, because
the objects that P depends on may be modified by c. One traditional solution is
separation logic, but the complexity and expressive power of separation logic are not
needed for P4, a statically instantiated language without pointers. Another tradi-
tional solution is using modification sets and dependent sets. That is, we characterize
c with its modification set, denoted with M, which is the set of paths of the extern
62

objects that c may modify, and characterize P with its dependent set, denoted with
D, namely the set of paths of the extern objects that P may depend on. If M and
D are disjoint, then P still holds after executing c. But, in this approach, D exposes
the names of objects used internally and breaks modularity.
To address these issues, we introduce hierarchical predicates for extern objects
based on P4’s hierarchical state structure and paths. We also refer to them as extern
predicates in certain contexts. For paths p and q, let p ⊒ q denote that p is a prefix
2
of q.
3
According to the allocation of control plane names, if the path of a control
instance is p, then each extern object allocated inside the control instance has path q
such that q ⊑ p. When using a predicate P to describe the persistent state in control
instance p, we set the dependent set of P as {p}, and interpret it as P may depend
on extern objects with path q such that q ⊑ p. In general, predicate P and dependent
set D should satisfy that P only depends on the objects with path q such that there
exists p ∈ D such that q ⊑ p. In other words, for any states s and s
′
,
(∀pq. p ∈ D ∧ q ⊑ p =⇒ s(q) = s
′
(q)) =⇒ (P (s) ⇐⇒ P (s
′
)). (3.1)
The modification set M is interpreted in the same way: program c may only modify
extern objects with path q that there exists p ∈ M such that q ⊑ p. If P does not
depend on any objects q modified by c, i.e. there does not exist p, q, r such that
p ∈ D ∧ r ⊑ p ∧ q ∈ M ∧ r ⊑ q, (3.2)
then P still holds after executing c. To simplify (3.2), let
p ∥ q := ∀r. ¬(r ⊑ p ∧ r ⊑ q), (3.3)
2
Here prefix is considered in terms of lists of identifiers. For example, a.b is a prefix of a.b.c, but
not a prefix of a.bb. And p is also a prefix of itself.
3
p ⊑ q, p ⊏ q, and p ⊐ q are defined accordingly.
63
which read as paths p and q are disjoint. In other words, p ∥ q means one cannot
get the same r by appending to p and q, so p and q must branch somewhere. Thus,
p ∥ q has an alternative definition that there exist path r as the common prefix and
identifiers a and b such that
a ̸= b ∧ p ⊑ r.a ∧ q ⊑ r.b. (3.4)
This gives a method to efficiently test disjointness. And we define disjointness between
sets as
D ∥ E := ∀p ∈ D. ∀q ∈ E. p ∥ q,
and (3.2) can be rewritten as D ∥ M.
When handling hierarchical predicates, it is preferable for the dependent sets to
be automatically inferred from the predicates instead of figured out manually. So we
define a syntax of hierarchical predicates, denoted by P :
P ::= P
pure
| p 7→ v | P
1
∧ P
2
| P
1
∨ P
2
| ¬P
| ∃x.P (x) | ∀x.P (x) | wrap
D
(P )
P
pure
::= pure predicate
p ::= path
v ::= object value
D ::= path set.
It includes atoms (pure predicates and singletons), normal logical combinators, and
a wrapper wrap
D
to replace the dependent set with set D that dominates the original
dependent set. The logical combinators and quantifiers are interpreted as usual.
The wrapper wrap
D
does not change the interpretation of the predicate but only the
dependent set. Each hierarchical predicate P has its dependent set δ(P ) determined
64

WF(P
pure
) WF(p 7→ v)
WF(P
1
) WF(P
2
)
WF(P
1
∧ P
2
)
WF(P
1
) WF(P
2
)
WF(P
1
∨ P
2
)
WF(P )
WF(¬P )
WF(P (x)) δ(P (x)) does not depend on x
WF(∃x.P (x))
WF(P (x)) δ(P (x)) does not depend on x
WF(∀x.P (x))
WF(P ) δ(P ) ⊑ D
WF(wrap
D
(P ))
Figure 3.2: Inference rules for well-formedness
by its syntax:
δ(P
pure
) = ∅ δ(p 7→ v) = {p}
δ(P
1
∧ P
2
) = δ(P
1
) ∪ δ(P
2
) δ(P
1
∨ P
2
) = δ(P
1
) ∪ δ(P
2
)
δ(¬P ) = δ(P ) δ(∃x.P (x)) = δ(P (x))
δ(∀x.P (x)) = δ(P (x)) δ(wrap
D
(P )) = D
Predicate P and its syntactic dependent set δ(P ) might not satisfy (3.1). We say P
is well-formed if P and δ(P ) satisfy (3.1), i.e.
wf(P ) := (∀pq. p ∈ δ(P ) ∧ q ⊑ p =⇒ s(q) = s
′
(q)) =⇒ (P (s) ⇐⇒ P (s
′
)). (3.5)
In order to derive wf(P ) from the syntax of P , we introduce a set of inference
rules for syntactic well-formedness WF(P ) as shown in Figure 3.2. The first five rules
do not have side conditions. The rules for quantified predicates require that δ(P (x))
does not depend on the quantified variable x. As the dependent set is calculated
syntactically, this means x either does not appear in the path p in p 7→ v, or the
occurrences in paths are wrapped by wrap
D
where D does not depend on x. The
rule for wrap
D
requires that the original dependent set δ(P ) is covered by the new
65

dependent set D, denoted by δ(P ) ⊑ D. It is defined as
E ⊑ D := ∀p ∈ E. ∃q ∈ D. p ⊑ q.
Theorem 3.1 (Soundness). For any predicate P , if WF(P ) is derivable from the
inference rules in Figure 3.2, then we have wf(P ) as defined in (3.5).
Proof. The proof is by induction on the inference tree. Most of the rules are straight-
forward, except the last rule. Assume we have δ(P ) ⊑ D and WF(P ). The condition
δ(P ) ⊑ D means
(∀pq. p ∈ δ(P ) ∧ q ⊑ p =⇒ s(q) = s
′
(q)) =⇒ (P (s) ⇐⇒ P (s
′
)).
The condition WF(P ) implies wf(P ) by induction. We need to prove wf(wrap
D
(P )),
which is
(∀pq. p ∈ D ∧ q ⊑ p =⇒ s(q) = s
′
(q)) =⇒ (P (s) ⇐⇒ P (s
′
)),
as wrap
D
does not change the interpretation. So it is enough to show
(∀pq. p ∈ D∧q ⊑ p =⇒ s(q) = s
′
(q)) =⇒ (∀pq. p ∈ δ(P )∧q ⊑ p =⇒ s(q) = s
′
(q))
We only need to show, for every path q,
(∃p. p ∈ δ(P ) ∧ q ⊑ p) =⇒ (∃r. r ∈ D ∧ q ⊑ r) (3.6)
Let p be as in the first existential quantifier, so p ∈ δ(P ) and q ⊑ p. By the definition
of δ(P ) ⊑ D, there exists a path r ∈ D such that p ⊑ r. By the definition of ⊑, it is
transitive, so q ⊑ r. So we have (3.6).
66

Recall the program in Figure 2.1. In Section 5.3, we are going to relate the
P4 program with a functional program that serves as its functional model, in order
to prove properties about the program. So we use hierarchical predicates to relate
P4 state with model values. The predicate row repr(p, r) describes that a Row at p
represents a row model value r:
row repr(p, r) := wrap
{p}
(p.reg 7→ r).
Each Pane has three rows, so its representation predicate pane
repr is the conjunction
of row repr on each P4 instance row i and its corresponding model value a[i]:
pane repr(p, a) := wrap
{p}
^
i=1,2,3
row repr(p.row i, a[i])
!
.
Similarly, a filter (the name SBFilter is reserved for later use) consists of four panes
and auxiliary registers clear index and timer, and the predicate filter repr is defined as
filter repr(p, f) := wrap
{p}
p.clear index 7→ · · · ∧ p.timer 7→ . . .
∧
^
i=1,2,3,4
pane repr(p.pane i, f.a[i])
!
.
It is easy to check well-formedness of these predicates. The dependent set of all these
predicates are {p} for their respective p’s. So the client can handle them without
knowing their internal implementation.
A commonly used technique to prove correctness of programs is layer refinement.
That is, a low-level functional model (like above) is related to a high-level functional
model by a simulation relation f R f
′
, where f is a value from the low-level model
and f
′
is a value from the high-level model. They we prove operations preserve the
simulation relation, then we only need to reason about the high-level model instead
67

of the low-level model. When we want to describe the P4 state of a SBFilter with a
high-level functional model, we can define predicate using the quantifier in the syntax:
SBFilter repr(p, f
′
) := ∃f. filter repr(p, f) ∧ f R f
′
.
So the client can use the high-level functional model directly.
3.2 Program logic
Based on hierarchical predicates, we give our Verifiable P4 program logic that is
useful and proved sound with respect to the operational semantics. As mentioned
above, it is a Hoare logic with dependent set and modification set. Given a P4
program, the global environment Γ is directly calculated, so we treat Γ as a known
constant. The form of function specification is as shown in Figure 3.3. First, there
are three layers of quantified variables: WITH ⃗x, WITH ⃗y, and EX ⃗z. All the three
layers of quantified variables can be dependently typed in Coq’s type system, so they
can include propositions. The outer layer WITH ⃗x provides universally quantified
variables ⃗x whose scope is the whole specification. PATH p indicates “when executing
in an instance at path p”. There is a common pattern, for a P4 class Foo,
WITH p ( : Γ(p) = Foo), PATH p, . . .
This pattern gives a specification for every instance p of class Foo, where Γ(p) is an
abuse of notation for “getting the class name of instance p in Γ”. Although it is a
nice form of specification, we have not yet established a method to assist its proof
in our verifier (Chapter 4), so it is currently only used in specifications of extern
methods, whose correctness is directly proved using the semantics without using the
verifier. For internal functions, we use a pragmatic approach that is setting p to be
68
Full form of function specification:
WITH ⃗x, PATH p, MOD m M
WITH ⃗y,
PRE (ARG
⃗
P , MEM
⃗
Q, EXT
⃗
R)
POST (EX ⃗z, RET v, ARG
⃗
P
′
, MEM
⃗
Q
′
, EXT
⃗
R
′
)
Quantifier-free form of function specification:
PATH p, MOD m M
PRE (ARG
⃗
P , MEM
⃗
Q, EXT
⃗
R)
POST (RET v, ARG
⃗
P
′
, MEM
⃗
Q
′
, EXT
⃗
R
′
)
Figure 3.3: Function specification
the path of each instance, respectively, and running the proof script multiple times
(see Chapter 5).
WITH ⃗y and EX ⃗z are standard quantifiers in function specifications, as used in
VST [7], VeriFast, and Dafny. WITH ⃗y means variables ⃗y are shared between the
precondition and the postcondition. They can be any value in a particular function
call, so if the precondition is satisfied with certain ⃗y, the postcondition is satisfied
with the same ⃗y. EX ⃗z are existentially quantified for the postcondition.
In the C language, we do not need to mention local variables in function specifica-
tions, since each function call creates a new stack frame. But P4 has local variables
visible in different functions (actions) in the same class, for example,
control Ingress {
bit<8> x;
action incr() { x = x + 1; }
apply { x = 0; incr(); }
}
The variable x is visible in both the apply block and the incr action. As defined
in our semantics, a P4 function call only creates a new stack frame if it calls to a
69
different instance (which often means a different control block, but not always). So P4
functions that are called in the same control block need to describe local variables that
the functions use in their preconditions and postconditions, specify which variables
they modify.
For clarity, we explain the rest of the function specification in the quantifier-free
form as shown in the second half of Figure 3.3. The MOD-clause MOD m M specifies
the variable modification set m and the object modification set M. m is either a set of
variables (indicated with paths) or “∗”, which means any variable can be modified. M
is the modification set as described in Section 3.1. These two sets are placed outside
of quantified variables ⃗y and ⃗z, so that their validity can be proved and applied
automatically without supplying ⃗y and ⃗z, which depends on symbolic program data
and sometimes requires human effort to figure out.
The precondition of the form ARG
⃗
P , MEM
⃗
Q, EXT
⃗
R, where
⃗
P is a list of values
corresponding to in parameters (including inout parameters) of the function,
⃗
Q is a
list of pairs of paths and values that describes local variables,
⃗
R is a list of well-formed
hierarchical predicates. The postcondition is similar, but with an additional return
value v.
Bitwise abstract interpretation All values used in preconditions and postcondi-
tions, including v and values in
⃗
P and
⃗
Q, are bitwise abstract values. The same applies
for assertions in Hoare triples (see below). Recall that, in Section 2.3, we mentioned
uninitialized variables in P4 need to be treated explicitly, so variables are stored using
storable values whose bits can take values within 0, 1, and ⊥ (uninitialized).
During verification, we have not only uninitialized bits but also unknown bits, for
example, when uninitialized bits are nondeterministically converted to 0/1 during pa-
rameter copy-in/copy-out. Although these bits are “initialized”, it is counterintuitive
70

a
a
a
a
a
a
a
a
a
a
a
a
Abstract value
Storable value
0 1 ⊥
0 T F F
1 F T F
⊥ T T T
Table 3.1: Truth table of bitwise abstract interpretation
for programmers to keep track of their “initialization” and reason about nondetermin-
istically converted values, so our experience shows most P4 programs do not rely on
such quirky behavior. If the program logic directly reflects initialized and uninitial-
ized bits, the verification using the program logic becomes inconvenient. For example,
consider that a struct value with two single-bit fields {|x := 0; y := ⊥|} is passed into
a function as an argument. According to the semantics of argument evaluation, this
value is determinized to ∃b. {|x := 0; y := b|}. Although the programmer is happy
to treat y as uninitialized, it need to be handled explicitly in such a program logic.
It is inconvenient: (1) it requires more often manipulation of quantifiers; (2) all the
assertions need to identify whether each field is initialized or not.
In order to resolve the inconvenience and simplify verification, we apply abstract
interpretation [13] on a simple abstract domain, namely bitwise abstract values. The
construction of bitwise abstract values coincides with storable values, i.e. each bit
takes values within 0, 1, and ⊥, but ⊥ is interpreted as “don’t care”, so it can
correspond with any bit value, as shown in Table 3.1. This is also used to encode
a struct with some of the fields unspecified. This abstract interpretation is usually
unnoticeable by the verifier user.
Hoare triple In Verifiable P4 program logic, a Hoare triple is of the form
{X}stmt{Y, Z}, where Y is the normal postcondition and Z is the return postcondi-
tion. This method of manipulating control flow signals in Hoare logic is the same as
ret assert in VST [1, Chapter 24], so we skip detailed discussion, and only consider the
71

Simplified rule for assignment:
Γ, p,
⃗
P ⊢ exp ⇓ v
Γ, p ⊢ {MEM
⃗
P , EXT
⃗
Q}x@(inst p
′
) := exp{MEM
⃗
P [p
′
7→ v], EXT
⃗
Q}
Simplified function call rule (when p = q):
Γ, p ⊢ f() ⇓ (q, func) Γ, func satisfies PATH q, MOD m M, PRE X
f
, POST Y
f
p = q X ⊢ X
f
(X, Y
f
, m, M) ⇓
merge
Y
Γ, p ⊢ {X}f(); {Y }
Figure 3.4: Sample program logic rules
form of {X}stmt{Y }. The assertions X and Y are of the form “MEM
⃗
P , EXT
⃗
Q”,
where the meaning of MEM and EXT is the same as in function specifications.
3.2.1 Program logic rules
Figure 3.4 shows a few simplified program logic rules, which we use to explain the
interesting aspects of the program logic.
The first rule is for assignment, which corresponds to the semantic rule in Fig-
ure 2.12. When the precondition is (MEM
⃗
P , EXT
⃗
Q), we want to find the post-
condition of executing x@(inst p
′
) := exp, where inst p
′
is the locator. The premise
Γ, p,
⃗
P ⊢ exp ⇓ v means the expression exp is evaluated to v if the variables are as
described in
⃗
P . (We omit the conversions between normal values and storable values
that use three-valued bits.) Then the post condition is simply obtained by setting
p
′
7→ v in
⃗
P . Although we do not present the soundness proof here, one can see that if
is almost straightforward because the modification of s
local
in the semantics is directly
reflected in the logic rule. In comparison, using the Petr4 semantic rule in Figure 2.12
will be much more complicated to design a program logic and prove its soundness,
because it is necessary to track location allocation and prove their distinctness.
72
The second rule in Figure 3.4 is for function calls. For simplicity, we present a
special case that function f has no parameters or return value, its specification is
given in quantifier-free form, and p = q (explained below).
The most interesting part is the last premise, (X, Y
f
, m, M) ⇓
merge
Y . It merges
the assertion at the call site with the assertion from the function, using the disjointness
we established in Section 3.1. It is defined as
((MEM
⃗
P
1
, EXT
⃗
Q
1
), (MEM
⃗
P
2
, EXT
⃗
Q
2
), m, M) ⇓
merge
((MEM filter(
⃗
P
1
, m) +
⃗
P
2
, EXT filter(
⃗
Q
1
, M) +
⃗
Q
2
),
where filter(
⃗
P
1
, m) +
⃗
P
2
means to remove local variables in
⃗
P
1
that appear in m since
they are modified (remove everything in
⃗
P
1
if m is ∗) and put together with
⃗
P
2
,
and filter(
⃗
Q
1
, M) +
⃗
Q
2
means to remove every hierarchical predicates Q in
⃗
Q
1
that
δ(Q) ∥ M (the dependent set of Q is disjoint from M) and put together with
⃗
Q
2
.
The meaning of the rest premises in the second rule is as follows. The rule first
looks up f in Γ and finds out f is to execute function body func in path q. (We
ignore the detailed function resolution procedure here.) The second premise states
that func satisfies its function specification. We ignore the ARG part in X
f
and Y
f
,
since there are no parameters. The third premise is p = q, which means the function
body func is executed in the same stack frame where f is called, as defined in the
semantics. In the general case, if p ̸= q, the function body func is executed in a new
stack frame, then the local variable assertions in Y
f
and the modified local variables
in m do not affect the postcondition Y . Then the rule needs the precondition X to
imply function precondition X
f
.
The complete program logic rules are provided as source code in Coq. We proved
all these rules are sound with respect to the operational semantics in Coq. The result
that we proved can be expressed as the following theorem.
73
Theorem 3.2 (Soundness). The semantics of the judgment Γ, p ⊢ {X}stmt{Y } is
for every states s and s
′
, and signal sig, if we have Γ, p, s ⊢ stmt ⇓ (s
′
, sig), and have
X(s), then sig = return and Y (s
′
). All Verifiable P4 program logic rules are proved
in Coq with respect to the operational semantics and semantics of Hoare triples.
74
Chapter 4
Tactic-Based Verifier
The previous chapter presented a sound program logic for P4 programs. But verifying
a program, i.e., proving each function specification, by directly applying those rules
is still a tough and laborious process, which involves picking appropriate rules, in-
stantiating variables, simplifying terms, and resolving entailments between assertions.
In this section, we describe our “Verifiable P4” verifier based on Coq’s Ltac tactic
programming that helps users verify P4 control blocks. The general design of the
tactic-based verifier is similar to VST-Floyd [7], which is a verifier for C programs. It
automatically applies programming logic rules according to the P4 program syntax. It
also includes automatic simplification and resolution of assertions for both efficiency
and readability of intermediate steps. Our verifier gives a practical way to construct
foundational proofs showing that P4 programs implement functional models; but the
amount of work to verify a program depends on how much the natural interpretation
of the program differs from the mathematical language used in its specification.
We first give a simple example as a walkthrough in Section 4.1. Then we in-
troduce the core tactics provided by the verification system and their mechanism
in Section 4.2. After that, we show the automated resolution of MOD-clauses in
Section 4.3.
75
Proof assistant Here we give some additional preliminaries for the readers who are
not familiar with proof assistants. The typical workflow of interactive theorem prov-
ing in a proof assistant like Coq is as follows. The user inputs the theorem/lemma
statement they want to prove, which becomes the initial proof goal in the proof as-
sistant. The proof assistant displays the current proof goal(s), and the user inputs a
command, which is called a tactic, to either resolve the proof goal or reduce it into
one or more easier goals, based on their knowledge about the proof. This procedure
iterates until there are no remaining proof goals, at which point the lemma is proved.
The advantage of interactive theorem proving is it can prove complicated mathemat-
ical properties that are highly unlikely to become automatically provable in the near
future.
A tactic is a program used to construct a proof. Tactics can vary from performing
a simple proof step to automatically searching for a proof using advanced algorithms.
In practice, users can summarize common patterns in proofs and create new reusable
tactics. Program verification proofs often contain many common patterns, making
them an ideal target for building a tactic system. For example, VST-Floyd is a
tactic system for C program verification using separation logic. Coq provides a tactic
language, Ltac [16], for building custom tactics.
4.1 Walkthrough
In this section, we give a simple example of program verification using our Verifiable
P4 verifier. A real, large-scale application of proving a sliding-window Bloom filter
will be presented in Chapter 5.
Consider a P4 control block in the V1Model architecture as shown in Figure 4.1.
The first two lines list the function prototypes of read and write. The program to
verify is in the Increment control block, which maintains a register array reg with a
76

// Function prototypes
void read(out T result, in bit<32> index);
void write(in bit<32> index, in T value);
// Prorgam to verify
control Increment(out bit<8> x) {
register<bit<8>>(1) reg;
apply {
ℓ
1
reg.read(x, 0);
ℓ
2
x = x + 1;
ℓ
3
reg.write(0, x);
}
}
Figure 4.1: An example P4 control block in V1Model
Definition p : path := [”incr”].
Definition Increment spec : func spec :=
WITH,
PATH p
MOD ∗ [p]
WITH (x : Z),
PRE
(ARG [], MEM [], EXT [p.reg 7→ (ObjRegister [P4Bit 8 x])])
POST
(RET Null, ARG [P4Bit 8 (x + 1)], MEM [],
EXT [p.reg 7→ (ObjRegister [P4Bit 8 (x + 1)])])
Figure 4.2: Function specification of Increment
single cell of type bit<8> (8-bit unsigned integer), referred as reg[0]. Line ℓ
1
loads
the value of reg[0] to x. Line ℓ
2
increases x by 1 (modulo 2
8
). Line ℓ
3
writes x back to
reg[0]. Overall, this function increases the value in reg by 1 and passes the new value
out as out parameter x.
Figure 4.2 shows the function specification written in Coq (simplified for pre-
sentation). The value in the register reg before calling apply is represented by a
mathematical integer (x : Z) in the WITH-clause. The state to track in the function
specification is simple: the precondition has neither in arguments (ARG) nor local
77
variables (MEM), and the EXT part contains a singleton extern predicate saying the
register at path p.reg is an 8-bit unsigned integer, which is the 8-bit representation
of x (x does not need to be between 0 and 255); the postcondition contains return
value Null (as the control block does not have a return value), out argument x + 1
(ARG), no assertion on local variables (MEM), and a singleton extern predicate saying
the new value of the register p.reg is x + 1.
The proof of Increment spec using the verifier is a step-by-step forward symbolic ex-
ecution, as in VST-Floyd [7]. Roughly speaking, the user first applies the start function
tactic to reduce from Increment spec to a Hoare triple across the function body, of
the form
{X
0
}ℓ
1
; ℓ
2
; ℓ
3
{Y }.
Then the user uses the step
1
and step call tactics to infer the postcondition of each
statement. It would be ideal if the inferred postcondition is the strongest postcondi-
tion: it is indeed the strongest for assignment statements, but it is not the strongest
for function calls. Because function calls are reasoned using function specifications,
which contain quantifiers, the strongest postcondition of a function call also includes
quantifiers. Those quantifiers are cumbersome in entailment resolution and human
interaction, so an instance of quantifier variables is inferred to generate a postcondi-
tion, which is not the strongest but enough to prove the program in most cases. Let
X
1
be the postcondition of executing ℓ
1
from X
0
. Then the tactic applies program
logic rules to reduce the goal to
{X
1
}ℓ
2
; ℓ
3
{Y }.
1
These tactics are called forward and forward call in VST. We call them step instead, since “for-
ward” is a commonly used term in networking.
78

Proof.
start function.
step. (∗ initialization ∗)
step call register read body.
{ entailer. } (∗ function precondition ∗)
{ simpl. lia. } (∗ resolve arithmetic conditions ∗)
{ simpl. lia. } (∗ resolve arithmetic conditions ∗)
step.
step call register write body.
{ entailer. } (∗ function precondition ∗)
{ simpl. lia. } (∗ resolve arithmetic conditions ∗)
{ simpl. lia. } (∗ resolve arithmetic conditions ∗)
step. (∗ empty statement ∗)
entailer.
Qed.
Figure 4.3: Proof script of Increment
The next two steps reduce the proof goal to {X
2
}ℓ
3
{Y } and then to X
3
=⇒ Y
in a similar way. Finally, the user uses the entailer tactic to resolve the entailment
X
3
=⇒ Y .
Figure 4.3 shows a more concrete version of the Coq proof script to prove
Increment spec. In addition to the aforementioned start function, step, step call,
and entailer tactics, Figure 4.3 uses step two more times to handle an implicit
initialization statement at the beginning and an empty statement at the end, respec-
tively. Also, after applying step call with a function body proof register read body or
register write body, the user uses entailer to prove the function precondition is satis-
fied. The variables in the WITH-clauses in register read body and register write body,
i.e. quantified variables, are also inferred by entailer. Some arithmetic proof goals are
also needed to prove after function calls, which are used to ensure the index to access
the register is in bounds. They can be proved easily by Coq’s built-in automated
tactics simpl and lia, which are not in the interest of this thesis.
The step call tactic requires the user to provide the proof of the callee func-
tion, such as register read body and register write body. In this example, since
79

register read body and register write body are proofs of extern methods, we have
proved them by hand directly with respect to the operational semantics in our
library. These methods are a fixed set for each architecture (such as V1Model and
Tofino), so we can provide as a library. In the case of P4 functions (control blocks,
tables, and actions), the user should first specify and prove the callee function in the
same way as the example. P4 language does not allow recursive functions, so the user
can prove the functions in order from the lowest layer to the highest. The step call
tactic requires the user to provide the proof instead of automatically searching in
a database. This is because functions, especially control blocks, may have separate
specifications for different cases, and automatic search may not find the proof for the
desired specification.
4.2 Tactics
In this section, we give detailed explanation of the structure of the tactic system, func-
tionality of tactics, and their implementation. Besides start function, step, and entailer
mentioned in the previous section, there are two more groups of tactics: predicate
manipulating tactics that perform necessary transformations during the step-by-step
proof, and table tactics that handles P4 tables.
start function tactic (for normal functions) The start function for normal func-
tions is used at the beginning of each normal function proof, including actions and
control blocks. It reduces a function specification to a Hoare triple. It first resolves
the MOD-clause as Section 4.3 will show. Then it simulates the copy-in procedure
by converting the in-argument assertions in the precondition into local variable as-
sertions. It also infers the postcondition of Hoare triple to prove from the function
postcondition by generating the weakest precondition of the copy-out procedure.
80

step tactics There are a three different step tactics used depending on the next
program statement:
• step: Execute the next program statement, including built-in function calls but
not other function calls.
• step if/step if Y : This tactic handles if-statements. Y is the postcondition of
the if-statement, which can be omitted if there are no other statements after
the if-statement. step if makes one subgoal for the then-clause and one for the
else-clause.
• step call lem ⃗v: This tactic processes a call to a function whose specification
is proved by the lemma lem. ⃗v is an optional list of Coq terms to instantiate
the second WITH-clause in the function specification proved in lem. If some
of the WITH-variables are not instantiated (including that ⃗v is not provided,
⃗v is shorter than the list of variables, and some terms in ⃗v are filled with “ ”),
the uninstantiated variables are filled with unification variables, which means
leaving them as values to be determined. These values are often inferable from
the values in the current assertion and function arguments, and automatically
filled by the following entailer tactic. So the user only needs to provide them
manually in some special cases.
All the step tactics include simplifying expressions with best effort.
Predicate manipulating tactics During the proof of a function body, the user
sometimes needs to transform the precondition in the Hoare triple before proceeding
to the next step. For example, suppose the precondition contains a encapsulated
hierarchical predicate, e.g. wrap
p
(P ∧ Q ∧ R), and the next step is a function call
that needs to match the contents inside wrap. Then she wants unpack the predicate
into three single predicates P , Q and R using the normalize EXT tactic below before
calling step call. The list of predicate manipulating tactics is as follows.
81

• normalize EXT: Flatten the hierarchical predicates by breaking wrap and con-
junctions, and then move the members to the top level of the EXT part as much
as possible.
• Intros: Move an existentially quantified variable from the precondition to the
context.
• Intros prop: Move a pure proposition (P
pure
) from the precondition to the con-
text.
• P4assert P : This tactic is used when a pure proposition P is needed for manual
transformation (e.g. rewriting with an equality). After applying P4assert P ,
the user first proves the precondition implies P , then P will be available in the
context for the remaining proof.
entailer tactic The entailer tactic is used to resolve or simplify assertion en-
tailments, mostly in the form of MEM
⃗
Q, EXT
⃗
R =⇒ MEM
⃗
Q
′
, EXT
⃗
R
′
or
ARG
⃗
P , MEM
⃗
Q, EXT
⃗
R =⇒ ARG
⃗
P
′
, MEM
⃗
Q
′
, EXT
⃗
R
′
. These goals appear at
the end of a function, a block, or at a function call (where we need to prove that
the current precondition satisfies the function precondition). This tactic is safe in
most cases: safe means it does not turn a provable goal into any unprovable goals.
The exception is the case where a pure proposition needs to be proved from the
precondition first, before reducing the entailment.
The reduction of entailment in this tactic is done by matching the corresponding
parts in the precondition and the postcondition. Function arguments are matched by
their positions. Local variables are matched by their names. Both function arguments
and local variables are reduced to the order relation (inclusion) in the abstract domain,
and resolve automatically if possible. Singleton extern predicates, which are of the
form p 7→ v, i.e. the value of the extern object p has value v, are matched with any
singleton with the same p. Other extern predicates, if they are not directly resolved,
82

are not be able to be matched. All the resolution steps include instantiation of
unification variables, which are often introduced by postconditions with existential
variables and by function calls for which the user has not (manually) provided an
instantiation for the WITH-clause.
There are some other tactics for resolving entailments. The Exists tactic instan-
tiates existential quantifiers in the postcondition. Predicate manipulating tactics
mentioned above are also applicable on entailments.
Table tactics There are two tactics for tables:
• start function (for tables): This tactic is used at the beginning of proofs of tables,
which are considered as a kind of function. It only supports the case that table
entries are known. It evaluates table key expressions and matches them against
the entries. It reduces the proof goal into each entry’s action call.
• table
action lem: After splitting a table into the cases for each entry, table action
lem is used on each goal to apply the function body proof lem of the action called
by the table in this case and reduce the proof goal into two entailments, before
and after the function call, respectively.
Summary With these five groups of tactics handling P4 execution, users can easily
verify P4 programs without paying further attention to P4 features. They only need to
focus on normal Coq proof specific to their theory and algorithm, such as arithmetic,
data structures, and packet forwarding protocols.
4.3 Automated proof of MOD-clauses
In a function specification, we need to have a MOD-clause of the form MOD m M to
indicate modified local variables and extern objects, so that the function specification
83

can compose with the assertion at the call site. When the start function tactic reduces
a function specification to a Hoare triple, it first proves the MOD-clause. P4 is
a simple language and the phase distinction between instantiation and execution
has eliminated higher-order runtime behavior, so the MOD-clause should be proved
automatically.
To prove a function only modifies m and M, we reason on the syntactic structure of
the function body.
2
The breakdown proof is done by applying proven-sound deduction
rules similar to program logic rules, e.g.
Γ, p ⊢ stmt
1
MOD m M Γ, p ⊢ stmt
2
MOD m M
Γ, p ⊢ stmt
1
; stmt
2
MOD m M .
Simple statements without function calls are also proved by applying such rules.
Function call statements can be proved either by stepping into the function or by
using its function specification. Function specifications designed in Chapter 3 has the
MOD-clauses outside of quantified variables, except the top-level quantified variables
(⃗x), which are expected to be inferable. So instantiating other quantified variables
is not required, making it easy to automatically apply the MOD-clauses in function
specifications.
The proof search is based on Coq’s built-in eauto search engine, so we do not
have to build and optimize a new one. The deduction rules are designed such that
each step has at most one applicable rule, so the proof search does not backtrack and
is reasonably efficient. The eauto search engine also allows the user to add proved
function specifications into the rules, so the caller does not need to step in to the
2
It is possible that a variable is first modified and then modified back. In this case, these syntax-
directed proof rules are incomplete. However, it is uncommon in practical programming, and if it
occurs, it is no harm to add them to the MOD-clause and maintain their value in the precondition
and the postcondition.
84
function. In the large-scale example presented in Chapter 5, the proof search takes
at most about 3 seconds for a function.
Discussion Another approach to prove MOD-clauses automatically is proof by re-
flection, which is the method of proving a property by writing a testing program for
the property and proving its correctness. So the proof is simply by evaluating the
program. We did not use proof by reflection for MOD-clauses because proof by re-
flection is usually considered more heavyweight. It requires more effort to implement
and modify. We refer the reader to a fantastic book [10] for more information about
proof by reflection.
85
Chapter 5
Application Demonstration:
Sliding-Window Bloom Filter
In this section, we present an application case of our verification framework to demon-
strate its utility. Using this example, we show our Verifiable P4 is capable of mod-
ularly verifying P4 programs at a larger scale, and proving stateful properties of
processing a sequence of packets (called flow properties).
Consider a switch that connects an internal network with an untrusted external
network. Adversaries from the external network may perform distributed denial-of-
service (DDoS) attacks on internal hosts. Although the switch is capable of handling
the huge traffic, the internal hosts cannot, because they are based on CPUs. One
policy for protecting internal hosts is to allow incoming traffic recently requested by
internal hosts and block most unsolicited incoming traffic. This is a kind of stateful
firewall, which can be implemented based on a sliding-window Bloom filter (SBF).
SBF is an approximate data structure for maintaining a set whose elements expire
after a fixed amount of time. We take a P4 implementation of such a stateful firewall
on the Tofino architecture with a single pipeline as a case study on verifying stateful
P4 programs. It is acceptable that the stateful firewall allows a small portion of
86
unsolicited traffic that internal hosts can handle, but it is necessary to prove that the
stateful firewall does not block any benign traffic. We formalize this property as a
formula on the history of packets and give an end-to-end verification.
5.1 Sliding-window Bloom filter
Programmable switches have limited resources. Therefore sketching data structures
are used to implement features with tiny space and time (usually in terms of hardware
pipeline stages). The trade-off is tolerating errors with a low probability.
A famous example of sketching data structures is the Bloom filter [4], which
approximately supports querying existence of elements in a set. It supports two
operations: (1) inserting an element, and (2) querying an element and reporting
“likely in the set” (positive) or “definitely not in the set” (negative).
Beyond the Bloom filter, sliding-window Bloom filter (SBF) is the task of main-
taining elements in a set, and automatically removing each element approximately T
time units after its most recent insertion. For fixed time interval T and tolerance pa-
rameter δ, the data structure provides two operations: (1) inserting an element with
a timestamp (timestamps of operations must be nondecreasing), and (2) querying an
element with a timestamp and reporting “likely inserted within time (1 + δ)T ” (pos-
itive) or “definitely not inserted within time T ” (negative). A classic algorithm for
sliding-window Bloom filter is using multiple Bloom filters periodically, which we will
show below. Although there is a more efficient algorithm [32], that algorithm cannot
be implemented on the Tofino architecture (nor on other hardware P4 architectures).
We choose the sliding-window Bloom filter on the Tofino architecture generated
by the CatQL code generator [35] as the verification target. In the following sections,
we will prove that the P4 program always returns a positive result if the element is in
the set. This is called no-false-negative property. On the other hand, it is also desired
87

that the probability of returning a positive result when the element is not in the
set (low-false-positive-rate property). This property requires a probabilistic model of
elements and hash functions used in the Bloom filter, so we leave it as future work.
But the no-false-negative proof includes useful steps for the low-false-positive-rate
property.
A sliding-window Bloom filter (SBF) consists of k Bloom filters, called panes.
Each pane has r rows, each associated with a hash function h
i
. The hash function
array (h
1
, h
2
, . . . ) is the same for all the panes.
1
Each row is a hash table of S bit-
value slots initially filled with 0s.
2
Inserting x into a Bloom filter is to set the h
i
(x)-th
slot to 1 for each row i. Querying x in a Bloom filter is to take conjunction over the
h
i
(x)-th slot of all rows i. If x is already inserted, then querying x must be 1 as the
h
i
(x)-th slot is set to 1 for all i. So if the result is 0, it is “definitely not in the set”.
One can expect the false-positive rate is low: If γ is the density of 1s in each row,
an ideal analysis of hash functions gives the probability of getting 1 on query of a
not-in-the-set x is γ
r
.
An SBF maintains time by dividing it into pieces of the same size, called time
panes, as shown in Figure 5.1. Each time pane is associated with an SBF pane, which
is allocated circularly. In this example, there are k = 4 SBF panes. At any moment,
there are k−1 working panes (denoted by solid boxes) and 1 clearing pane (denoted by
a dashed box). If the present time is in pane3 as shown in the first row of Figure 5.1,
pane1 through pane3 are working panes, and new elements will be inserted into the
latest working pane, pane3. When querying, all working panes are queried and the
overall result is their disjunction. So a query is guaranteed no-false-negative, if the
element has been inserted between the beginning of the earliest working pane and
1
One may choose to use different hash functions for each pane, for example, in order to prevent
some exploitation of the hash functions. These are not considered in this thesis.
2
The implementation of panes (Bloom filters) is slightly different from the standard implemen-
tation, which uses a single hash table for all hash functions. This difference is because the Tofino
architecture only allows one update per register (the underlying implementation of hash table) per
packet. This difference does not affect the essence of the Bloom filter.
88

time
time
pane
pane1 pane2 pane3pane4
pane2 pane3 pane4
present
present
pane2 pane3 pane4 pane1
present
pane1
query window
Figure 5.1: Panes in a sliding window Bloom filter
the present time, which is the query window shown in the figure. When the present
time moves to the next pane, as shown in the second row, pane4 is finished clearing
and reused for new elements. Pane1 is outdated and going to be cleared, and the left
endpoint of the query window becomes the beginning of pane2.
To clear a pane means to set it to all zeros. This cannot be done instantaneously
on Tofino (or similar architectures). Instead, with each packet processed, one more
bit of the clearing pane will be set to zero. This is called the clearing duty. So we
require an assumption in our verification result: there are always at least s packets
in each time pane to serve the clearing duty, where s is the number of slots in each
row. We can guarantee this assumption using the Tofino switch’s packet generator, a
component just before the P4 pipeline that can be configured to insert extra packets
at the desired rate.
Which elements are maintained by this data structure? As shown in Figure 5.1,
the length of the query window varies between (k − 2) and (k − 1) time panes. So
the aforementioned time T is the lower bound of query window size, i.e. (k − 2) time
panes. If an element is inserted within time T , it is guaranteed no-false-negative.
89
Rest of the chapter Next, we will show some key points in the P4 program of
SBF, which provides further illustration of P4 programming, and explains the tricks
used to implement the algorithm efficiently that makes the verification challenging.
Although the P4 program is clumsy, the functional model (Section 5.3.1) and the
axiomatic interface (Section 5.2.1) to characterize SBF are much easier to read and
reason about.
5.1.1 P4 implementation
The P4 program of SBF that we verify is as follows. This program is generated by
the CatQL code generator. This program is the extended version of Figure 2.1. The
program has been significantly simplified for presentation,
3
but it unavoidably remains
very complicated, as it was crafted by CatQL to maximize the efficient utilization of
hardware resources. P4 language features, such as registers, actions and tables, also
add complexity to the program.
This program demonstrates the complexity of P4 programs. Nonetheless, it follows
the natural modular structure of SBF, which contains three layers from bottom to
top: row, pane, and SBF. Each control block corresponds to a layer. So we can verify
it modularly.
1 control Row(in bit<8> api, in bit<18> index, out bit<8> res) {
2 Register<bit<8>, bit<18>>(262144, 0) reg;
The program starts with the P4 implementation of a Bloom filter row. It has
two in parameters: api takes value from NOOP (no operation), INSERT, QUERY, and
CLEAR; it represents the operation to take on the row; index represents the index
of the slot to modify or query, which is a hash value of the key. Row has one out
3
The full version is available in the appendix.
90
U execute(in I index) {
U rv;
T value = reg.read(index);
apply(value, rv);
reg.write(index, value);
return rv;
}
Figure 5.2: Behavior of execute in RegisterAction
parameter, namely res, which is used to pass out the query result. Line 2 defines reg,
which is a Tofino register with 2
18
= 262144 slots, initialized with zeros.
The P4 implementation is a bit more verbose than in conventional imperative pro-
gramming languages, because the P4 implementation is closely related to hardware.
3 RegisterAction<bit<8>, bit<18>, bit<8>>(reg) regact insert = {
4 void apply(inout bit<8> value, out bit<8> rv) {
5 value = 1;
6 rv = 1;
7 }
8 };
9 action act insert() {
10 res = regact insert.execute(index);
11 }
12 action act query() { ... } /∗ Similar to regact insert and act insert ∗/
13 action act clear() { ... } /∗ Similar to regact insert and act insert ∗/
Line 3 defines a register action regact insert on register reg, which is used to up-
date reg when api is INSERT. It contains an abstract method (c.f. Section 2.2.2)
apply, which is called by the register action itself when its execute method is called
on line 10. The behavior of execute is illustrated in Figure 5.2. In particular,
regact insert.execute(index) sets the index-th slot to 1 and returns 1. Line 9 wraps
the register action as an action. The register actions are defined and wrapped as
actions similarly for QUERY and INSERT.
14 table tbl row {
15 key = { api : ternary; }
91

16 actions = {
17 NoAction(); act insert(); act query(); act clear();
18 }
19 const entries = {
20 NOOP : NoAction();
21 INSERT : act insert();
22 QUERY : act query();
23 CLEAR : act clear();
24 }
25 }
26 apply {
27 tbl row.apply();
28 }
29 }
Then we define a match-action table tbl row, which corresponds to a hardware
match-action table. This table is responsible for calling the appropriate action based
on the value of api. The control block’s apply block, which is its entrance, is just
calling tbl row.
30 control Pane(inout pane md t pane md) {
31 Row() row 1; Row() row 2; Row() row 3;
32 apply {
33 row 1.apply(pane md.api, pane md.index 1, pane md.res 1);
34 row 2.apply(pane md.api, pane md.index 2, pane md.res 2);
35 row 3.apply(pane md.api, pane md.index 3, pane md.res 3);
36 }
37 }
The implementation of a pane is simple. It just dispatches the operation to each
of its rows, and returns the result from each row as-is.
38 control SBFilter(in bit<64> key, in bit<8> api, in bit<48> tstamp,
39 out bit<8> res) {
40 sbf md t sbf md; /∗ temporary variables ∗/
41 Register<bit<18>, bit<1>>(1, 0) reg clear index;
42 Register<pair<bit<16>, bit<16>>, bit<1>>(1, {0, 0}) reg timer;
43 Pane() pane 1; Pane() pane 2; Pane() pane 3; Pane() pane 4;
92

The control block for an SBF has three in parameters, key, api, and tstamp, which
represent the key, the operation, and the timestamp, respectively. The operation can
take value from INSERT, QUERY and CLEAR. All the operations involve serving the
clearing duty, and the CLEAR operation does not do anything else. The out parameter
res returns the query result. Line 40 defines a struct to use as temporary variables.
Lines 41, 42 & 43 define the stateful objects that an SBF maintains. Among them,
reg clear index is an 18-bit integer that increments by one in each step and wraps back
to 0 after reaching 2
18
− 1. It determines the position to be cleared in each row of the
clearing pane. reg timer maintains the time information according to the timestamp
of each packet generated by the switch, in nanoseconds, to control which panes are
being used and when to enter a new time pane. pane 1, . . . , pane 4 are 4 instances
of Pane to implement the panes of the SBF.
68 apply {
69 act hash index 1(); /∗ caculate hash functions ∗/
70 act hash index 2();
71 act hash index 3();
72 tbl clear index.apply(); /∗ increment clear index ∗/
73 tbl timer.apply(); /∗ update timer ∗/
74 tbl set panes.apply(); /∗ generate operation for each pane ∗/
75 pane 1.apply(sbf md.pane 1); /∗ invoke each pane ∗/
76 pane 2.apply(sbf md.pane 2);
77 pane 3.apply(sbf md.pane 3);
78 pane 4.apply(sbf md.pane 4);
79 tbl merge panes.apply(); /∗ merge query results of panes ∗/
80 }
81 }
We temporarily skip some lines of code and show the apply block of SBFilter first,
which is the main body of SBFilter. It first calculates the three hash functions used
by the SBF, followed by calling tbl clear index to read and increment reg clear index.
Lines 73 & 74 update reg timer and use it to generate an operation for each pane,
respectively. This part involves some tricks to efficiently maintain the timer, which
93

will be explained below. Then it invokes each pane to process their operation, followed
by merging the query result using a match-action table tbl merge panes.
44 RegisterAction<...>(reg timer) regact timer signal 0 = {
45 void apply(inout pair<bit<16>, bit<16>> val, out bit<16> rv) {
46 if (val.lo != 0) { /∗ increase hi by 1 when setting lo back to 0 ∗/
47 if (val.hi == 4∗PT−1) /∗ test if wrapping back to 0 ∗/
48 { val.lo = 0; val.hi = 0; }
49 else
50 { val.lo = 0; val.hi = (val.hi + 1); }
51 }
52 else
53 { val.lo = val.lo; val.hi = val.hi; }
54 rv = val.hi;
55 }
56 };
57 RegisterAction<...>(reg timer) regact timer signal 1 = { ... }
58 table tbl timer { ... } /∗ select the regact based on the 21st bit of tstamp ∗/
59 table tbl set panes { /∗ assign operations to panes based on timer ∗/
60 const entries = {
61 (INSERT, 0∗PT .. 1∗PT−1) : set api(CLEAR, NOOP, NOOP, INSERT);
62 (INSERT, 1∗PT .. 2∗PT−1) : set api(INSERT, CLEAR, NOOP, NOOP);
63 (INSERT, 2∗PT .. 3∗PT−1) : set api(NOOP, INSERT, CLEAR, NOOP);
64 (INSERT, 3∗PT .. 4∗PT−1) : set api(NOOP, NOOP, INSERT, CLEAR);
65 ...
66 }
67 }
Lines 44–67 briefly show the tricks of maintaining the timer. In order to measure
the time elapsed efficiently, the program counts the number of rounds that the 21
st
bit (the bit representing 2
21
) of the timestamp switches from 0 to 1 and back to 0. We
assume that the packet flow is dense enough that the timestamps are continuous up
to the 21
st
bit. This ensures the timestamp does not leap without being noticed by
the timer. This assumption is easily satisfied by a practical flow, as it only requires
one packet in every 2
21
ns ≈ 2 ms. And it can be further ensured using the packet
generator. Such a round is called a “tick-tock”, so each tick-tock is 2 · 2
21
ns.
Let PT (pane time) be the number of tick-tocks in each time pane. The SBF panes
are used circularly, so its period is k ·PT tick-tocks. The register reg timer keeps track
94

of the position in this period using two integers, lo and hi, which are the 21
st
bit of the
previous timestamp, and the number of tick-tocks modulo k · PT. Line 44 shows the
register action used to update the timer when the 21
st
bit of the current timestamp is
0. Another register action regact timer signal 1 is used when the 21
st
bit is 1. These
two actions are selected by table tbl timer. Then table tbl set panes uses the value of hi
to generate operations of panes. This manipulation of timestamps reduces the usage
of arithmetic operators and uses more tables. This is a common way to efficiently
utilize resources in P4 programming. But it increases the complexity of verification.
5.2 Verification organization
To provide navigation for the remaining of this chapter, we begin by presenting an
overview of the the whole verification process in Figure 5.3. We first compiled the
P4 source program into P4light AST using our front end (Section 2.1). We then
generated the global environment using the instantiation phase program. The rest of
the verification process is separated in two parts shown in gray regions: verification
of the sliding-window Bloom filter (SBF) and verification of the firewall (FW) as a
client of the SBF. We will illustrate them in detail in Sections 5.3 & 5.4, respectively.
The verification of the SBF concerns the implementation of the SBF, in particular,
the SBF instance and its subordinate objects. The verification of the firewall concerns
the client code that calls the SBF, the model of other programmable blocks (parsers
and deparsers), and the Tofino switch model.
We design a narrow interface between these two parts, which only consists of the
interface of the abstract functional model of SBF (but not the implementation) and
two proof blocks: (1) the Verifiable P4 proof of that the SBF P4 program satisfies
the abstract function specification, and (2) the proof of that the abstract SBF model
satisfies the axiomatic interface of SBF. The statements of the latter are shown in
95

subsumption
proof
Con. SBF Model
Abs. SBF Model
Refinement Proof
Con. SBF Func.
Spec.
SBF Objects
P4 Proof
Abs. SBF Func.
Spec.
P4 Proof
FW Model
SBF Axiom. Interf.
FW Func. Spec.
P4 Proof
P4 Program
FW Objects
Depends on contents
Depends on interfaces
Main Theorem
P4 AST
compile
Global Environment
Switch Model
Flow Property
Firewall VerificationSBF Verification
Figure 5.3: Overview. Rounded rectangles represent blocks of definitions; parallelograms represent blocks of proofs. A solid
line indicates that a block depends on the implementation of another block; a dashed line indicates that a block depends only
on the interface of another block. A proof block usually establishes the relationship between two definition block and therefore
depends on these two blocks. The proof body is irrelevant to its usage, so proof blocks are always depended with dashed lines.
96
Section 5.2.1. This narrow interface allows modular verification: a data structure
and its client are verified separately; the data structure proofs can be used for a
different client, and the client proofs can be plugged with a different data structure
implementation that satisfies the interface.
One verification methodology used for SBF is layer refinement, which is similar
to the technique in CertiKOS [21] and verified FEC [11]. We implement two layers of
functional model, called “concrete functional model” and “abstract functional model.”
The concrete functional model is defined closely related to the P4 program, so it is
convenient to prove that the P4 program implements the functional model. However,
the shortcoming of the concrete functional model is that it is too much involved with
the tricks used in the P4 program, making it more difficult to prove desired properties
about the functional model. So we define the abstract functional model of SBF in
a more elegant way. We prove the refinement relation between these two functional
models, and then prove the abstract function specification through subsumption of
specifications. We then prove the axioms in the axiomatic interface, with the benefit
of the abstract functional model.
The next part is the verification of the firewall. We first prove P4 program of
the firewall as a client of the SBF. For the behavior of the switch, we focus on
the part related to the firewall build a switch model that assumes the behavior of
other components (parser and deparser). With the switch model, we prove that the
stateful firewall guarantees “no-false-negative,” in other words, the response packets
to internal hosts are always allowed by the stateful firewall.
5.2.1 Axiomatic interface of SBF
Figure 5.4 shows the axioms to characterize SBF. There are three operations,
SBFinsert, SBFquery, and SBFclear, defined in the abstract SBF model. SBFinsert
97

If state f is OK until (at least) deadline t, and if you insert IP address h at time t
and then look up h at time t
′
no more than T seconds later, it will be present.
QueryInsertSame : ∀ f t t’ h, ok until f t → t ≤ t’ ≤ t+T →
SBFquery (SBFinsert f (t, h)) (t’, h) = Some true.
If you could find IP address h
′
in the state, and you insert (perhaps different)
IP address h, then h
′
is still in there.
QueryInsertOther : ∀ f t t’ h h’, SBFquery f (t’, h’) = Some true →
ok until f t → t ≤ t’ → SBFquery (SBFinsert f (t, h)) (t’, h’) = Some true.
Doing a clear-step won’t affect any query results.
QueryClear : ∀ f t t’ h, ok until f t → t ≤ t’ →
SBFquery f (t’, h) = SBFquery (SBFclear f t) (t’, h).
If state f is OK until deadline t, you can extend its
deadline by up to 100 microseconds (T /C) by [insert].
OkInsert : ∀ f t t’ h, ok until f t → t ≤ t’ ≤ t+T/C →
ok until (SBFinsert f (t,h)) t’.
If state f is OK until deadline t, you can extend its
deadline by up to 100 microseconds (T /C) by [clear].
OkClear : ∀ f t t’, ok until f t → t ≤ t’ ≤ t+T/C → ok until (SBFclear f t) t’.
The initial state is OK until its preset deadline.
OkEmpty : ∀ t, ok until (SBFempty t) t.
Figure 5.4: Axiomatic interface of SBF
inserts a record to the SBF with a timestamp, and serves the clear duty of one slot.
SBFclear only serves the clear duty of one slot. SBFquery queries the SBF with a
timestamp without modification. In order to characterize the requirement of serving
the clear duty, we add a predicate ok until f t to test whether f is in good shape
without clearing before t. The meaning of the axioms is explained in the figure.
These axioms are enough to prove the “no-false-negative” property. (see Section 5.4)
98
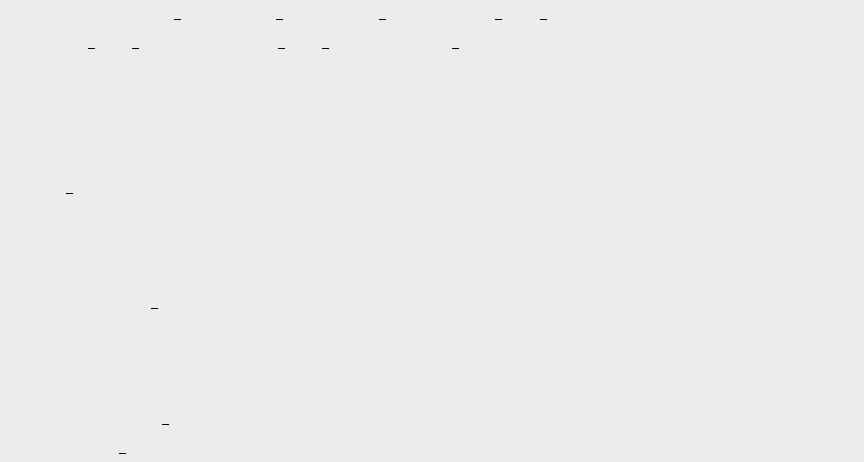
5.3 Verification of sliding-window Bloom filter
This section shows the verification process of the SBF module using Coq and Verifiable
P4.
5.3.1 Concrete functional model
The first step of the verification is defining a functional model of the P4 program in
the Coq proof assistant. Because we are going to define a more abstract functional
model as an intermediate step of the proof, we name this as the concrete functional
model, as it is closer to the original program.
1 Parameter (num slots num rows num panes pane tick tocks : Z).
2 Let cycle tick tocks := pane tick tocks ∗ num panes.
3
4 (∗ a.[i] and a.[i := x] are get and set for lists, respectively. ∗)
5 (∗ map2 applies a binary function on each pair of
6 corresponding elements of two lists and results in a single list. ∗)
7 (∗ fold andb is logical ”and” over a list of Booleans. ∗)
8
9 Definition row := list bool.
10
11 Definition row insert (r : row) (i : Z) : row := r.[i := true].
12
13 Definition pane := list row.
14
15 Definition pane insert (f : pane) (is : list Z) : pane :=
16 map2 row insert f is.
The code above is the first part of the concrete functional model. At the be-
ginning, the dimension and time constants of the SBF are defined as parameters in
the functional model. These constants are hardcoded in the P4 program, as the P4
language is not flexible enough to make all of them parameters. With these constants
parametrized, all the proofs about the functional model itself are for any parameters.
99

And we expect to be able to replay the same Verifiable P4 proof scripts, which con-
nects the program with the concrete functional model, for programs with different
values of the constants.
The functional model is layered in the same way as the P4 program. Types row
and pane represent the persistent states of rows and panes, respectively. The function
row insert defines the operation of inserting an element into a row, with the element
is represented by its hash value for the row. The function pane insert defines the
operation of inserting an element into a pane, with the element is represented by a
list of hash values. The QUERY and CLEAR operations are defined similarly in the
functional model.
18 Record filter := mk filter {
19 fil panes : list pane;
20 fil clear index : Z;
21 fil timer : Z ∗ bool;
22 }.
23
24 Definition update timer (t : Z ∗ bool) (tick : bool) : Z ∗ bool :=
25 if tick
26 then (fst t, true)
27 else if snd t
28 then if (fst t =? cycle tick tocks − 1)
29 then (0, false)
30 else (fst t + 1, false)
31 else t.
32
33 Definition get clear pane (t : Z ∗ bool) : Z :=
34 fst t / pane tick tocks.
35
36 Definition get insert pane (cp : Z) : Z :=
37 if (cp =? 0) then num panes − 1 else cp − 1.
38
39 Definition filter insert (f : filter) (tick : bool) (h : list Z) : filter :=
40 ... (∗ unpack f, calling update timer, get clear pane, get insert pane ∗)
41 let new panes := panes.[cp := pane clear panes[cp] (Zrepeat clear index num rows)]
42 .[ip := pane insert panes[ip] h] in
43 mk filter new panes new clear index new timer.
100
Function specification of Row.apply() for the INSERT operation:
PATH p
MOD ∗ [p]
WITH (r : row) (i : Z) ( : 0 ≤ i < num slots),
PRE (ARG [P4Bit 8 INSERT; P4Bit index w i], MEM [ ], EXT [row repr p r])
POST (RET Null, ARG [P4Bit 8 1], MEM [ ], EXT [row repr p (row insert r i)])
Function specification of action act insert() in Row:
PATH p
MOD [[”rw”]] [p]
WITH (r : row) (i : Z) ( : 0 ≤ i < num slots),
PRE (ARG [ ], MEM [([”index”], P4Bit index w i)], EXT [row repr p r])
POST (RET Null, ARG [ ], MEM [([”rw”], P4Bit 8 1)],
EXT [row repr p (row insert r i)])
Figure 5.5: Function Specifications with concrete functional model
The code above is the SBF layer of the functional model. Type filter repre-
sents the persistent state of an SBF. Because the dimension and time constants are
parametrized, we use division and modulo operations to define the manipulation of
the timer. The function filter insert defines the operation of inserting an element into
an SBF, with the element is represented by a list of hash values. Variables cp and
ip represent the indices of the panes to clear and to insert, respectively. The QUERY
and CLEAR operations are defined similarly.
5.3.2 Function specifications
The function specifications link the functional model with the P4 program state.
For example, Figure 5.5 shows the specification of the control block Row’s apply func-
tion when the operation is INSERT, and the specification of the action act insert() are
as shown in Figure 5.5. The hierarchical predicate row repr, as defined in Section 3.1,
is used to link the functional model value with the state of extern objects in P4. Be-
cause each layer supports different operations, we write a function specification for
each operation and prove them separately, instead of organizing different operations
101

into a single function specification. The specification for other operations and other
layers are defined similarly.
5.3.3 Verification of abstract methods
Abstract methods are an important feature in P4, whose semantics we defined in
Section 2.2.2. For example, when P4 is compiled to hardware in architectures such
as Tofino, there is a significant limitation in the way that the P4 program accesses its
state: only one access (to any particular piece of state) per packet. To work around
that limitation, P4 allows that single access to be a read-modify-write expressed as a
“register action,” in which the custom modification is written by the P4 programmer
as an abstract method.
In this section, we show how to verify P4 extern objects with abstract methods, by
demonstrating Tofino’s register actions. Register actions are widely used in stateful
programs in Tofino, such as the SBF (see Section 5.1.1). A register action contains
an abstract method, apply, that specifies how the register is updated. We have built a
systematic way to modularly verify register actions with respect to functional models,
and built automatic tactics to facilitate the verification procedure. We hope this
approach is general enough for all extern objects with abstract methods.
An abstract method is a code block that does not have access to any variables
beyond the parameters passed into the the abstract method. So, in a naive approach,
an abstract method can be modeled as a pure function from values to values. For
example, when the abstract method has one in parameter and one out parameter, we
can model its behavior as a function f : Val → Val. Its function specification can be
written as below.
PATH p, MOD ∗ [ ]
WITH (v : Val),
PRE (ARG [v], MEM [ ], EXT [ ])
POST (RET Null, ARG [f v], MEM [ ], EXT [ ])
102
Function specification of abstract method apply in RegisterAction:
PATH p, MOD ∗ [ ]
WITH (v : A) (H
v
: P v),
PRE (ARG [r v], MEM [ ], EXT [ ])
POST (RET Null, ARG [r (f v), g v], MEM [ ], EXT [ ]).
Function specification of method execute in RegisterAction:
PATH p, MOD ∗ [p
reg
]
WITH (reg : list Val) (i : Z) (v : A) (H
v
: P v) (H
′
v
: reg[i] = r v),
PRE (ARG [P4Bit w i], MEM [ ], EXT [p
reg
7→ (ObjRegister reg)])
POST (RET (g v), ARG [ ], MEM [ ],
EXT [p
reg
7→ (ObjRegister reg[i := r (f v)])]).
Figure 5.6: Function specifications in RegisterAction
However, this form is not convenient to apply in actual verification tasks. Be-
cause Val contains all kinds of values, including signed and unsigned integers, structs,
headers, etc., the model function f needs to be defined for all the cases, and the func-
tion specification needs to be proved for all the cases. But in fact, these parameters
are not only typed, but sometimes also have more restrictive constraints from the
program design. In order to characterize and utilize those constraints, we allow the
parameters to be represented by a custom type A instead of Val. We use a predicate
P : A → Prop to characterize valid inputs, and use r : A → Val to describe the
representation of A as a value. This approach gives more convenience and flexibility
for treating abstract methods.
For example, consider the abstract method in the register action mentioned in Sec-
tion 2.2.2. Figure 5.6 first shows the general form of function specification of abstract
method apply, where functions r, f and predicate P are as above, and function g re-
lates the input with the out parameter rv for the return value of execute. Our library
provides a general specification of execute parametrized by the apply specification.
Once the user has proved the abstract method satisfies a specification in this form,
the specification of function execute provided in our library can be specialized for the
instance. The specialized form is given in the second part of Figure 5.6, where the
103

parameters A, r, P, f, g are from the apply method of the instance. The specialization
procedure is supported by the fully automatic tactic build execute body, so the user
does not have to handle the details.
Abstract methods are often simple. For abstract methods that do not have con-
straints P on their parameters and do not have branches in the function body, we
have implemented an automatic tactic to infer and prove its function specification.
For example, a simple abstract method used in SBF is
void apply(inout bit<32> val, out bit<32> rv) {
rv = val;
val = (val + 32w1);
}
By automatic inference, we get
A = Z P (a) = true r(a) = P4Bit 32 a
f(a) = a + 1 g(a) = P4Bit 32 a.
5.3.4 Abstract functional model
The concrete functional model is coarse and close to the P4 implementation, therefore
it is not convenient for reasoning about its own properties, such as the axioms shown
in Figure 5.4.
Record SBFilter core : Type := {
t
switch
: Z; t
last
: Z; n
clear
: Z; p : list (list H)
}.
Definition SBFilter = option SBFilter core.
From a mathematician’s perspective, the sliding-window Bloom filter should be
rather defined as above. The elements in each pane should not be represented by
hash tables. Instead, as a mathematical model, we should use the set of elements
104

to represent a pane. And an SBF should not be represented by physical panes used
periodically, but by a list of working panes sorted from the oldest to the newest
(denoted by p). For the clearing pane, we only need to count the number of slots
that have been cleared (denoted by n
clear
). To keep track of time, we use a timestamp
of unlimited integer instead of 64-bit integer, and only keep track of two things: the
time when we will switch to the next pane (t
switch
), which is also the upper bound of
the current query window, and the last timestamp we have seen (t
last
). Also, the SBF
might fall into a corrupted state if the clear duty is not properly completed, or if the
packets are not dense enough for the timer to work. So we define SBF as an option
type, and use None to represent the corrupted state. In summary, we define the
representation of an SBF as SBFilter as above, where H denotes the type of elements.
Definition SBFrefresh (f : SBFilter) (t : Z) : SBFilter :=
match f with
| Some (t
switch
, t
last
, n
clear
, p) ⇒
assert(t ∈ [t
last
, t
last
+ t
tick
]);
if (t > t
switch
) then
assert(n
clear
≤ num slots);
let p
′
:= p[1..(num panes − 1)] ++ [[]] in
Some ((t
switch
+ t
pane
), t
last
, 0, p
′
)
else
Some f
| None ⇒ None
end.
Definition SBFinsert (f : SBFilter) (t, h) : SBFilter :=
match SBFrefresh f t with
| Some (t
switch
, t
last
, n
clear
, p) ⇒
p
′
:= p.[num panes − 2 := p.[num panes − 2] ++ [h]]
Some (t
switch
, t, n
clear
+ 1, p
′
)
| None ⇒ None
end.
Then we can define function SBFinsert that inserts an element to the SBF, which
is used in the SBF axioms in Figure 5.4. We first define function SBFrefresh that
refreshes the SBF up to time t, which includes two parts. The first part is checking
105
the time interval between the last and the current timestamps such that tracking
time by tick is accurate. The second part is, when t > t
switch
, removing the first
pane (i.e. the oldest pane) from p and inserting an empty pane (corresponding to
the fully-cleared pane) at the end, to form p
′
. In SBFrefresh, we use assert to denote
checking a property and returning None if it fails.
In function SBFinsert, after using SBFrefresh to refresh the SBF up to date, we
insert element h into the latest pane, update t
last
with t, and increment n
clear
. The
other operations SBFquery and SBFclear are defined similarly using SBFrefresh. The
abstract operation SBFquery only returns the query result without modifying the SBF
in any ways including serving the clear duty.
5.3.5 Refinement proof
In order to prove that the concrete functional model refines the abstract functional
model, we first define a simulation relation R between them. For a concrete SBF f
and an abstract SBF f
′
, we say f R f
′
if either f
′
is the corrupted state None, or the
following four conditions are satisfied:
1. The working panes of the concrete SBF simulate the working panes in p
′
in the
abstract SBF. The correspondence between concrete panes and abstract panes
is determined by i
c
, which is the index of the clearing pane. i
c
is determined
by the timer record in the concrete SBF. The panes in p
′
are compared with
[p
i
c
+1
, . . . , p
num panes−1
, p
0
, . . . , p
i
c
−1
], respectively, where p
0
, . . . , p
num panes−1
are
panes in the concrete SBF in physical order. The simulation relation between a
concrete pane and an abstract pane is that the hash tables in the concrete pane
is the same as the result of inserting the elements in the corresponding abstract
pane.
106

2. The clearing pane in the concrete SBF is properly cleared with respect to n
clear
in the abstract SBF. That includes two cases: If n
clear
≥ num slots, i.e. the
clearing pane is fully cleared, then all slots of the concrete clearing pane are
0; If n
clear
< num slots, then the n
clear
slots before the next slot to clear in the
concrete are 0, counting from the end if reaching the beginning of the hash
table.
3. The timer of the concrete SBF simulates the timer of the abstract SBF, which
contains the following two conditions:
(a) The time to switch panes in the abstract SBF, t
switch
, is aligned with a tick-
tock in the concrete SBF. This is because the concrete SBF keeps track of
time by examining a particular bit. Each time the bit flips is called a tick,
and a cycle of flipping twice is called a tick-tock. The concrete SBF always
switches panes at the end of a tick-tock, and the abstract SBF must align
with it. Mathematically, that is (2t
tick
) divides t
switch
.
(b) The time interval between the last timestamp t
last
and the time to switch
panes t
switch
matches with the concrete SBF. The concrete SBF tracks
time by counting the number of ticks with modulus, and switches panes
when the number reaches certain points. Let n be the number of ticks
from now till pane switching in the concrete SBF. For example, n = 1
if the current tick is the last one before pane switching. If t
last
is at the
beginning of the current tick, we have t
switch
− t
last
= n · t
tick
. Since t
last
can be anywhere in the current tick, the condition needs to be satisfied is
t
switch
− t
last
∈
(n − 1) · t
tick
, n · t
tick
.
4. The numbers used in the concrete SBF are in their designated range, respec-
tively: fil clear index must fall in [0, num slots). The first element of fil timer
must fall in [0, cycle tick tocks). The second element of fil timer must be 0 or 1.
107

PATH p
MOD ∗ [p]
WITH (h : H) (t : Z) (f : SBFilter),
PRE (ARG [h; P4Bit 8 INSERT; P4Bit 48 t; P4Bit 8 1], MEM [ ],
EXT [SBFilter repr p f])
POST (RET Null, ARG [P4Bit 8 1], MEM [ ],
EXT [SBFfilter repr p (filter insert f (t, h))])
Figure 5.7: Function Specifications relating the abstract functional model
This simulation relation allows us to prove that the three operations (insert, query,
and clear) preserve the simulation relation. For example, the preservation of the insert
operation is as follows.
Lemma 5.1. For any concrete SBF f , abstract SBF f
′
, timestamp t, and element
h, if f R f
′
, then inserting (t, h) preserves the simulation relation, i.e.
filter insert f (⌊t/t
tick
⌋ mod 2) (hash(h))
R
SBFinsert f
′
(t, h)
.
The lemmas for the other two operations, query and clear, are defined similarly.
We proved these three lemmas in the Coq proof assistant, using normal interactive
proof techniques and an automatic solver reasoning about arrays [44].
We utilize this abstraction in the function specifications of SBFilter to encapsulate
SBF’s implementation details. As mentioned in Section 3.1, we define hierarchical
predicate
SBFilter repr(p, f
′
) := ∃f. filter repr(p, f) ∧ f R f
′
.
to relate the abstract model with P4 state. Then we can define function specification
relating P4 program state to the abstract functional model. For example, Figure 5.7
shows the function specification in the case that the operation is INSERT. This specifi-
cation hides all the implementation details of the SBF. As long as the implementation
satisfies the function specification and the SBF axioms, we can prove the client has
108

desire property. We prove the abstract function specifications through the concrete
specifications and the refinement lemma (Lemma 5.1).
Finally, we define the operator ok until and prove the axioms of SBF (Figure 5.4).
For an abstract SBF f and timestamp t, the predicate ok until indicates whether f is
fresh enough if the next operation is at time t. The predicate ok until is defined as, f
and t satisfies ok until if the following conditions hold:
1. The adjacent operations are close enough, i.e. 0 ≤ t − t
last
≤ T/C.
2. The SBF is well-formed. This includes (1) t
last
< t
switch
; (2) |p| = num panes−1;
(3) If the time interval between each pair of consecutive operations afterwards
is not more than (T/C), including the interval between the next operation and
t
last
, then the clear duty will be fulfilled at or before t
switch
. We write it as the
formula
⌊t
switch
− 1 − t
switch
/(T/C)⌋ + n
clear
>= num slots.
We proved that the abstract functional model satisfies the SBF axioms in Coq.
5.4 Verification of stateful firewall
In the previous section, we verified the implementation of a sliding-window Bloom
filter. In this section, we show how we verify the stateful firewall implemented as
a client of the sliding-window Bloom filter, to ensure it satisfies the desired flow
property.
Recall that the task of this stateful firewall is to filter and block unsolicited traffic
from the external network into the internal network, in order to prevent DDoS attack
against internal hosts, whose capacity is far less than the switch. We want to show
109
the “no-false-negative” property: the stateful firewall allows each packet that is the
response of a recent outgoing packet. We express this property as
p.dir = in ∧ h[i].dir = out ∧ h[i].dst = p.src
∧ h[i].src = p.dst ∧ p.t − h[i].t ≤ T
=⇒ r = forward, (5.1)
where h is the history as a list of packets, p is the current packet, and r is the reaction
of the switch for the current packet.
5.4.1 Verifying the P4 program of stateful firewall
The stateful firewall is implemented as a control block, based on the sliding-window
Bloom filter, which we have verified in Section 5.3. The control block reads the
packet’s headers parsed by the parser. It determines whether the packet is outgoing
(from internal to external) or incoming (from external to internal), by testing whether
the source IP address has the prefix of the internal network. For an outgoing packet,
it inserts the pair (p.dst, p.src) into the SBF. For an incoming packet, it queries where
the pair (p.src, p.dst) is in the SBF, and it forwards the packet only if the SBF reports
“positive”. Otherwise, it drops the packet.
Similar to Section 5.3, we build a functional model of this control block, based on
the abstract functional model of SBF. Then we prove the control block satisfies the
functional model using our Verifiable P4 framework. This program is much simpler
than the SBF, and so is the proof.
5.4.2 Switch model
The stateful firewall runs on a switch of the Tofino architecture, which also takes part
in the program’s behavior. So we need a model of the switch’s behavior to reason
about the program. In Section 2.5, we discussed architecture specification.
110
In this application, instead of adopting our full model of Tofino, we adopt a
single-pipeline idealized model for a that axiomatizes the behavior of other pro-
grammable components, so we can focus on the SBF and stateful firewall. The other
programmable components, the parser and the deparser, have very different nature
than the SBF and stateful firewall. The main complexity of the SBF and stateful fire-
wall is the persistent state, while the parser and the deparser are stateless and their
complexity is about packet structure. We leave verification of parsers and deparsers
as a separate future problem. For example, Leapfrog [19] is a verifier for P4 parsers
that we could perhaps integrate with Verifiable P4.
In this idealized switch model, we only consider the IP header of each packet, and
treat the rest as payload. In an IP header, we only care about the destination and
source addresses. So we represent a packet as ((dst, src), payload). The input packet
also comes with a timestamp t. The result is represented as either None to indicate
the packet is dropped or Some ((dst, src), payload) to indicate the forwarded packet.
Let Γ be the global environment of the P4 program, p be the path of the control
instance, and func be the function body of the control’s apply block. The behavior of
the switch is shown in Figure 5.8. The judgment ⇓
packet
describes the processing of a
single packet. The judgment ⇓
flow
describes the processing of a flow, i.e. a sequence
of packets. For simplicity, we use encode to denote encoding the timestamp and the
header into a list of P4 values as arguments. And decode denotes decoding the drop
flag and the header from the arguments.
5.4.3 Flow property proof
Given the execution relation of a flow packets, the flow property that we want to
prove is described as the following theorem.
Theorem 5.1. Let the initial state s
extern
be empty. For any historical packets h,
current packet p, assume we have the following conditions:
111

Γ, p, ([], s
extern
) ⊢ (func, encode(t, (dst, src))) ⇓ ((s
′
local
, s
′
extern
), v
out
, return Null)
decode(v
out
).drop = true
(s
extern
, (t, (dst, src), payload)) ⇓
packet
(s
′
extern
, None)
Γ, p, ([], s
extern
) ⊢ (func, encode(t, (dst, src))) ⇓ ((s
′
local
, s
′
extern
), v
out
, return Null)
decode(v
out
).drop = false
(s
extern
, (t, (dst, src), payload)) ⇓
packet
(s
′
extern
, Some (decode(v
out
).hdr, payload))
(s
extern
, []) ⇓
flow
(s
extern
, [])
(s
extern
, p
0
) ⇓
packet
(s
′
extern
, r
0
) (s
′
extern
, p) ⇓
flow
(s
′′
extern
, r)
(s
extern
, p
0
:: p) ⇓
flow
(s
′′
extern
, r
0
:: r)
Figure 5.8: Switch model
1. Let r be the flow processing result of the current packet p, i.e.
(s
extern
, h + +[p]) ⇓
flow
(s
′
extern
, r
′
+ +[r]).
2. The flow is dense. That means for every i such that 0 ≤ i < |h|,
0 ≤ h[i + 1].t − h[i].t ≤ T /C,
where we consider h[|h|] = p.
Then we have (5.1).
We proved this theorem in Coq, based the proof of the SBF program, the proof
of SBF axioms, firewall program proof, and the switch model. The core of this part
of proof is a mathematical proof separate from the P4 program. Lennart Beringer,
who was expert in Coq but not very knowledgeable about P4 or Verifiable P4 at the
time, completed this mathematical proof in two days. [45]
112
Chapter 6
Conclusion
The foundation and correctness of programs have long been areas of concern. For
the P4 programming language, we built Verifiable P4, which contains the following
components. We improved the previous Petr4 operational semantics by introduc-
ing the instantiation phase separate from the execution phase. We mechanized the
operational semantics in the Coq proof assistant, guided by the P4
16
Specification
(Chapter 2). We defined hierarchical predicates for extern objects, and built a Hoare
logic for P4, which we proved sound with respect to the operational semantics (Chap-
ter 3). We built a tactic system using Coq’s Ltac language to facilitate the verification
process (Chapter 4).
To evaluate the utility of Verifiable P4, we applied Verifiable P4 on a sophisti-
cated stateful program. The program that we verified is a stateful firewall purely
implemented on the data plane. It maintains its internal state using a sliding-window
Bloom filter, which is a sketching data structure. Using Verifiable P4, we proved its
functional property about processing a flow of packets. The proof is fully checked by
Coq and modularly reusable.
In conclusion, we have built a mechanized operational semantics and verification
system for foundationally and modularly verifying stateful P4 programs. On one
113
hand, we hope this work introduces a new verification methodology to the P4 com-
munity. One the other hand, we anticipate this work will bring more applications for
the software verification community.
6.1 Future work
There are several directions for further research in this area.
First, it is beneficial to support more P4 features and more automatic verification.
Currently, Verifiable P4 only weakly supports features such as parsers and tables
with control plane entries. So verification involving those features requires significant
manual manipulation. In order to enhance automation, the approaches to explore
include migrating the techniques from other P4 verifiers, and looking for new methods
for stateful programs.
Second, we plan to achieve modular verification of instantiation. A single class in
P4 may be instantiated to multiple instances. Also, the same class can be instantiated
differently in different P4 programs. In the semantics and the program logic, we
designed the instantiation phase to characterize this behavior, and allowed the path
of the instance to be a variable in a function specification. But in the tactic-based
verifier, we still need to support such variables in the verification procedure, so that
each class only needs to be verified once and applied to all the instances.
Third, we are interested in modeling and verifying the behavior of the whole
switch, not only its P4 match-action pipeline. Since P4 programs only define the
programmable components, the rest of the switch is defined by the switch model.
In a real switch, such as Tofino [23], the full switch model is rather complicated,
with features such as packet recirculation and resubmission, traffic manager, packet
generator, and digest to the controller. We plan to build a language to define and
verify the behavior of the switch.
114
Fourth, it is worth considering programming tools on a level higher than P4. Lucid
[39] and CatQL [35] are high-level tools that generate P4 programs. We plan to define
operational semantics of the languages in these tools, verify the code generators or
secure them by compilation validation, and build verification tools for these high-level
languages.
Fifth, we would like to explore more applications of our verification system. On
one hand, that will produce more secured data plane programs. On the other hand,
that will further evaluate the verification system and lead to directions of future
improvements.
115
Appendix A
Programs Omitted in the Main
Text
A.1 P4 implementation of sliding-window Bloom
filter and stateful firewall
This is the complete version of the program that was excerpted in Section 5.1.1.
1 #define NOOP 0
2 #define CLEAR 1
3 #define INSERT 2
4 #define QUERY 3
5 #define INSQUERY 4
6 #define UPDATE 5
7 #define UPDQUERY 6
8 #define DONTCARE 0
9 #define QDEFAULT 0
10
11 #include <core.p4>
12 #include <tna.p4>
13 #include "common/headers.p4"
14 #include "common/util.p4"
15
16
116

17 typedef bit<8> api t;
18
19 typedef bit<16> window t;
20
21 typedef bit<4> pred t;
22
23 typedef bit<18> bf2 index t;
24
25 typedef bit<8> bf2 value t;
26
27 typedef bit<64> bf2 key t;
28
29 struct bf2 win md t {
30 api t api;
31 bf2 index t index 1;
32 bf2 index t index 2;
33 bf2 index t index 3;
34 bf2 value t rw 1;
35 bf2 value t rw 2;
36 bf2 value t rw 3;
37 }
38
39 struct bf2 ds md t {
40 window t clear window;
41 bf2 index t clear index 1;
42 bf2 index t hash index 1;
43 bf2 index t hash index 2;
44 bf2 index t hash index 3;
45 bf2 win md t win 1;
46 bf2 win md t win 2;
47 bf2 win md t win 3;
48 bf2 win md t win 4;
49 }
50
51 struct metadata t {
52 bf2 key t bf2 key;
53 api t bf2 api;
54 bit<8> solicited;
55 }
56
57 struct window pair t {
58 window t lo;
59 window t hi;
60 }
61
117
62 parser EtherIPTCPUDPParser(packet in pkt, out header t hdr) {
63 state start {
64 transition parse ethernet;
65 }
66 state parse ethernet {
67 pkt.extract(hdr.ethernet);
68 transition select(hdr.ethernet.ether type) {
69 ETHERTYPE IPV4 : parse ipv4;
70 : reject;
71 }
72 }
73 state parse ipv4 {
74 pkt.extract(hdr.ipv4);
75 transition select(hdr.ipv4.protocol) {
76 IP PROTOCOLS TCP : parse tcp;
77 IP PROTOCOLS UDP : parse udp;
78 : accept;
79 }
80 }
81 state parse tcp {
82 pkt.extract(hdr.tcp);
83 transition accept;
84 }
85 state parse udp {
86 pkt.extract(hdr.udp);
87 transition accept;
88 }
89 }
90
91 parser SwitchIngressParser(packet in pkt,
92 out header t hdr,
93 out metadata t ig md,
94 out ingress intrinsic metadata t ig intr md) {
95 TofinoIngressParser() tofino parser;
96 EtherIPTCPUDPParser() layer4 parser;
97 state start {
98 tofino parser.apply(pkt, ig intr md);
99 layer4 parser.apply(pkt, hdr);
100 transition accept;
101 }
102 }
103
104 control Bf2BloomFilterRow(in api t api,
105 in bf2 index t index,
106 out bf2 value t rw) {
118

107 Register<bf2 value t, bf2 index t>(32w262144, 8w0) reg row;
108 RegisterAction<bf2 value t, bf2 index t, bf2 value t>(reg row) regact insert = {
109 void apply(inout bf2 value t value, out bf2 value t rv) {
110 value = 8w1;
111 rv = 8w1;
112 }
113 };
114 action act insert() {
115 rw = regact insert.execute(index);
116 }
117 RegisterAction<bf2 value t, bf2 index t, bf2 value t>(reg row) regact query = {
118 void apply(inout bf2 value t value, out bf2 value t rv) {
119 rv = value;
120 }
121 };
122 action act query() {
123 rw = regact query.execute(index);
124 }
125 RegisterAction<bf2 value t, bf2 index t, bf2 value t>(reg row) regact clear = {
126 void apply(inout bf2 value t value, out bf2 value t rv) {
127 value = 8w0;
128 rv = 8w0;
129 }
130 };
131 action act clear() {
132 rw = regact clear.execute(index);
133 }
134 table tbl bloom {
135 key = {
136 api : ternary;
137 }
138 actions = {
139 act insert();
140 act query();
141 act clear();
142 .NoAction();
143 }
144 const entries = {
145 INSERT : act insert();
146 QUERY : act query();
147 CLEAR : act clear();
148 : .NoAction();
149 }
150 default action = .NoAction();
151 size = 4;
119

152 }
153 apply {
154 tbl bloom.apply();
155 }
156 }
157
158 control Bf2BloomFilterWin(inout bf2 win md t win md) {
159 Bf2BloomFilterRow() row 1;
160 Bf2BloomFilterRow() row 2;
161 Bf2BloomFilterRow() row 3;
162 apply {
163 row 1.apply(win md.api, win md.index 1, win md.rw 1);
164 row 2.apply(win md.api, win md.index 2, win md.rw 2);
165 row 3.apply(win md.api, win md.index 3, win md.rw 3);
166 }
167 }
168
169 control Bf2BloomFilter(in bf2 key t ds key,
170 in api t api,
171 in bit<48> ingress mac tstamp,
172 inout bf2 value t query res) {
173 bf2 ds md t ds md;
174 CRCPolynomial<bit<32>>(32w79764919, true, false, false, 32w0, 32
w4294967295) poly idx 1;
175 Hash<bit<32>>(HashAlgorithm t.CUSTOM, poly idx 1) hash idx 1;
176 action act hash index 1() {
177 ds md.hash index 1 = hash idx 1.get(ds key)[17:0];
178 }
179 table tbl hash index 1 {
180 actions = {
181 act hash index 1();
182 }
183 default action = act hash index 1();
184 size = 1;
185 }
186 CRCPolynomial<bit<32>>(32w517762881, true, false, false, 32w0, 32
w4294967295) poly idx 2;
187 Hash<bit<32>>(HashAlgorithm t.CUSTOM, poly idx 2) hash idx 2;
188 action act hash index 2() {
189 ds md.hash index 2 = hash idx 2.get(ds key)[17:0];
190 }
191 table tbl hash index 2 {
192 actions = {
193 act hash index 2();
194 }
120

195 default action = act hash index 2();
196 size = 1;
197 }
198 CRCPolynomial<bit<32>>(32w2821953579, true, false, false, 32w0, 32
w4294967295) poly idx 3;
199 Hash<bit<32>>(HashAlgorithm t.CUSTOM, poly idx 3) hash idx 3;
200 action act hash index 3() {
201 ds md.hash index 3 = hash idx 3.get(ds key)[17:0];
202 }
203 table tbl hash index 3 {
204 actions = {
205 act hash index 3();
206 }
207 default action = act hash index 3();
208 size = 1;
209 }
210 Register<bit<32>, bit<1>>(32w1, 32w0) reg clear index;
211 RegisterAction<bit<32>, bit<1>, bit<32>>(reg clear index) regact clear index
= {
212 void apply(inout bit<32> val, out bit<32> rv) {
213 rv = val;
214 val = (val + 32w1);
215 }
216 };
217 action act clear index() {
218 ds md.clear index 1 = regact clear index.execute(1w0)[17:0];
219 }
220 table tbl clear index {
221 actions = {
222 act clear index();
223 }
224 default action = act clear index();
225 size = 1;
226 }
227 Register<window pair t, bit<1>>(32w1, {16w0, 16w0}) reg clear window;
228 RegisterAction<window pair t, bit<1>, window t>(reg clear window)
regact clear window signal 0 = {
229 void apply(inout window pair t val, out window t rv) {
230 bool flip = (val.lo != 16w0);
231 bool wrap = (val.hi == 16w28135);
232 if (flip)
233 {
234 if (wrap)
235 {
236 val.lo = 16w0;
121

237 val.hi = 16w0;
238 }
239 else
240 {
241 val.lo = 16w0;
242 val.hi = (val.hi + 16w1);
243 }
244 }
245 else
246 {
247 val.lo = val.lo;
248 val.hi = val.hi;
249 }
250 rv = val.hi;
251 }
252 };
253 RegisterAction<window pair t, bit<1>, window t>(reg clear window)
regact clear window signal 1 = {
254 void apply(inout window pair t val, out window t rv) {
255 if ((val.lo != 16w1))
256 {
257 val.lo = 16w1;
258 }
259 rv = val.hi;
260 }
261 };
262 action act clear window signal 0() {
263 ds md.clear window = regact clear window signal 0.execute(1w0);
264 }
265 action act clear window signal 1() {
266 ds md.clear window = regact clear window signal 1.execute(1w0);
267 }
268 table tbl clear window {
269 key = {
270 ingress mac tstamp : ternary;
271 }
272 actions = {
273 act clear window signal 0();
274 act clear window signal 1();
275 }
276 const entries = {
277 48w0 &&& 48w2097152 : act clear window signal 0();
278 : act clear window signal 1();
279 }
280 default action = act clear window signal 1();
122

281 size = 2;
282 }
283 action act set clear win 1(bit<8> api 1,
284 bit<8> api 2,
285 bit<8> api 3,
286 bit<8> api 4) {
287 ds md.win 1.index 1 = ds md.clear index 1;
288 ds md.win 1.index 2 = ds md.clear index 1;
289 ds md.win 1.index 3 = ds md.clear index 1;
290 ds md.win 2.index 1 = ds md.hash index 1;
291 ds md.win 2.index 2 = ds md.hash index 2;
292 ds md.win 2.index 3 = ds md.hash index 3;
293 ds md.win 3.index 1 = ds md.hash index 1;
294 ds md.win 3.index 2 = ds md.hash index 2;
295 ds md.win 3.index 3 = ds md.hash index 3;
296 ds md.win 4.index 1 = ds md.hash index 1;
297 ds md.win 4.index 2 = ds md.hash index 2;
298 ds md.win 4.index 3 = ds md.hash index 3;
299 ds md.win 1.api = api 1;
300 ds md.win 2.api = api 2;
301 ds md.win 3.api = api 3;
302 ds md.win 4.api = api 4;
303 }
304 action act set clear win 2(bit<8> api 1,
305 bit<8> api 2,
306 bit<8> api 3,
307 bit<8> api 4) {
308 ds md.win 1.index 1 = ds md.hash index 1;
309 ds md.win 1.index 2 = ds md.hash index 2;
310 ds md.win 1.index 3 = ds md.hash index 3;
311 ds md.win 2.index 1 = ds md.clear index 1;
312 ds md.win 2.index 2 = ds md.clear index 1;
313 ds md.win 2.index 3 = ds md.clear index 1;
314 ds md.win 3.index 1 = ds md.hash index 1;
315 ds md.win 3.index 2 = ds md.hash index 2;
316 ds md.win 3.index 3 = ds md.hash index 3;
317 ds md.win 4.index 1 = ds md.hash index 1;
318 ds md.win 4.index 2 = ds md.hash index 2;
319 ds md.win 4.index 3 = ds md.hash index 3;
320 ds md.win 1.api = api 1;
321 ds md.win 2.api = api 2;
322 ds md.win 3.api = api 3;
323 ds md.win 4.api = api 4;
324 }
325 action act set clear win 3(bit<8> api 1,
123

326 bit<8> api 2,
327 bit<8> api 3,
328 bit<8> api 4) {
329 ds md.win 1.index 1 = ds md.hash index 1;
330 ds md.win 1.index 2 = ds md.hash index 2;
331 ds md.win 1.index 3 = ds md.hash index 3;
332 ds md.win 2.index 1 = ds md.hash index 1;
333 ds md.win 2.index 2 = ds md.hash index 2;
334 ds md.win 2.index 3 = ds md.hash index 3;
335 ds md.win 3.index 1 = ds md.clear index 1;
336 ds md.win 3.index 2 = ds md.clear index 1;
337 ds md.win 3.index 3 = ds md.clear index 1;
338 ds md.win 4.index 1 = ds md.hash index 1;
339 ds md.win 4.index 2 = ds md.hash index 2;
340 ds md.win 4.index 3 = ds md.hash index 3;
341 ds md.win 1.api = api 1;
342 ds md.win 2.api = api 2;
343 ds md.win 3.api = api 3;
344 ds md.win 4.api = api 4;
345 }
346 action act set clear win 4(bit<8> api 1,
347 bit<8> api 2,
348 bit<8> api 3,
349 bit<8> api 4) {
350 ds md.win 1.index 1 = ds md.hash index 1;
351 ds md.win 1.index 2 = ds md.hash index 2;
352 ds md.win 1.index 3 = ds md.hash index 3;
353 ds md.win 2.index 1 = ds md.hash index 1;
354 ds md.win 2.index 2 = ds md.hash index 2;
355 ds md.win 2.index 3 = ds md.hash index 3;
356 ds md.win 3.index 1 = ds md.hash index 1;
357 ds md.win 3.index 2 = ds md.hash index 2;
358 ds md.win 3.index 3 = ds md.hash index 3;
359 ds md.win 4.index 1 = ds md.clear index 1;
360 ds md.win 4.index 2 = ds md.clear index 1;
361 ds md.win 4.index 3 = ds md.clear index 1;
362 ds md.win 1.api = api 1;
363 ds md.win 2.api = api 2;
364 ds md.win 3.api = api 3;
365 ds md.win 4.api = api 4;
366 }
367 table tbl set win {
368 key = {
369 api : ternary;
370 ds md.clear window : range;
124

371 }
372 actions = {
373 act set clear win 1();
374 act set clear win 2();
375 act set clear win 3();
376 act set clear win 4();
377 .NoAction();
378 }
379 const entries = {
380 (INSERT, 16w0 .. 16w7033) : act set clear win 1(CLEAR,
381 NOOP,
382 NOOP,
383 INSERT);
384 (INSERT, 16w7034 .. 16w14067) : act set clear win 2(INSERT,
385 CLEAR,
386 NOOP,
387 NOOP);
388 (INSERT, 16w14068 .. 16w21101) : act set clear win 3(NOOP,
389 INSERT,
390 CLEAR,
391 NOOP);
392 (INSERT, 16w21102 .. 16w28135) : act set clear win 4(NOOP,
393 NOOP,
394 INSERT,
395 CLEAR);
396 (QUERY, 16w0 .. 16w7033) : act set clear win 1(CLEAR,
397 QUERY,
398 QUERY,
399 QUERY);
400 (QUERY, 16w7034 .. 16w14067) : act set clear win 2(QUERY,
401 CLEAR,
402 QUERY,
403 QUERY);
404 (QUERY, 16w14068 .. 16w21101) : act set clear win 3(QUERY,
405 QUERY,
406 CLEAR,
407 QUERY);
408 (QUERY, 16w21102 .. 16w28135) : act set clear win 4(QUERY,
409 QUERY,
410 QUERY,
411 CLEAR);
412 (CLEAR, 16w0 .. 16w7033) : act set clear win 1(CLEAR,
413 NOOP,
414 NOOP,
415 NOOP);
125

416 (CLEAR, 16w7034 .. 16w14067) : act set clear win 2(NOOP,
417 CLEAR,
418 NOOP,
419 NOOP);
420 (CLEAR, 16w14068 .. 16w21101) : act set clear win 3(NOOP,
421 NOOP,
422 CLEAR,
423 NOOP);
424 (CLEAR, 16w21102 .. 16w28135) : act set clear win 4(NOOP,
425 NOOP,
426 NOOP,
427 CLEAR);
428 ( , ) : .NoAction();
429 }
430 default action = .NoAction();
431 size = 13;
432 }
433 Bf2BloomFilterWin() win 1;
434 Bf2BloomFilterWin() win 2;
435 Bf2BloomFilterWin() win 3;
436 Bf2BloomFilterWin() win 4;
437 action act merge wins() {
438 query res = 8w1;
439 }
440 action act merge default() {
441 query res = 8w0;
442 }
443 table tbl merge wins {
444 key = {
445 api : ternary;
446 ds md.win 1.rw 1 : ternary;
447 ds md.win 1.rw 2 : ternary;
448 ds md.win 1.rw 3 : ternary;
449 ds md.win 2.rw 1 : ternary;
450 ds md.win 2.rw 2 : ternary;
451 ds md.win 2.rw 3 : ternary;
452 ds md.win 3.rw 1 : ternary;
453 ds md.win 3.rw 2 : ternary;
454 ds md.win 3.rw 3 : ternary;
455 ds md.win 4.rw 1 : ternary;
456 ds md.win 4.rw 2 : ternary;
457 ds md.win 4.rw 3 : ternary;
458 }
459 actions = {
460 act merge wins();
126

461 act merge default();
462 .NoAction();
463 }
464 const entries = {
465 (QUERY, 8w1, 8w1, 8w1, , , , , , , , , ) : act merge wins();
466 (QUERY, , , , 8w1, 8w1, 8w1, , , , , , ) : act merge wins();
467 (QUERY, , , , , , , 8w1, 8w1, 8w1, , , ) : act merge wins();
468 (QUERY, , , , , , , , , , 8w1, 8w1, 8w1) : act merge wins();
469 (QUERY, , , , , , , , , , , , ) : act merge default();
470 ( , , , , , , , , , , , , ) : .NoAction();
471 }
472 default action = .NoAction();
473 size = 6;
474 }
475 apply {
476 tbl hash index 1.apply();
477 tbl hash index 2.apply();
478 tbl hash index 3.apply();
479 tbl clear index.apply();
480 tbl clear window.apply();
481 tbl set win.apply();
482 win 1.apply(ds md.win 1);
483 win 2.apply(ds md.win 2);
484 win 3.apply(ds md.win 3);
485 win 4.apply(ds md.win 4);
486 tbl merge wins.apply();
487 }
488 }
489
490 control SwitchIngress(inout header t hdr,
491 inout metadata t ig md,
492 in ingress intrinsic metadata t ig intr md,
493 in ingress intrinsic metadata from parser t ig intr prsr md,
494 inout ingress intrinsic metadata for deparser t ig intr dprsr md,
495 inout ingress intrinsic metadata for tm t ig intr tm md)
496 {
497 action act for tbl 1 action 0() {
498 ig md.solicited = 1;
499 }
500 table tbl for stmt 1 {
501 actions = {
502 act for tbl 1 action 0();
503 }
504 default action = act for tbl 1 action 0();
505 size = 1;
127

506 }
507 action bf2 act set insert key(bit<8> api) {
508 ig md.bf2 api = api;
509 ig md.bf2 key = (hdr.ipv4.dst addr ++ hdr.ipv4.src addr);
510 }
511 action bf2 act set query key(bit<8> api) {
512 ig md.bf2 api = api;
513 ig md.bf2 key = (hdr.ipv4.src addr ++ hdr.ipv4.dst addr);
514 }
515 action bf2 act set clear key() {
516 ig md.bf2 api = CLEAR;
517 }
518 table bf2 tbl set key {
519 key = {
520 hdr.ipv4.src addr : ternary;
521 }
522 actions = {
523 bf2 act set insert key();
524 bf2 act set query key();
525 bf2 act set clear key();
526 }
527 const entries = {
528 2154823680 &&& 4294901760 : bf2 act set insert key(INSERT);
529 : bf2 act set query key(QUERY);
530 }
531 default action = bf2 act set clear key();
532 size = 2;
533 }
534 Bf2BloomFilter() bf2 ds;
535 action act for tbl 3 action 0() {
536 ig intr dprsr md.drop ctl = 1;
537 }
538 action act for tbl 3 action 1() {
539 ig intr dprsr md.drop ctl = 0;
540 }
541 table tbl for stmt 3 {
542 key = {
543 ig md.solicited : ternary;
544 }
545 actions = {
546 act for tbl 3 action 0();
547 act for tbl 3 action 1();
548 }
549 const entries = {
550 0 : act for tbl 3 action 0();
128

551 : act for tbl 3 action 1();
552 }
553 default action = act for tbl 3 action 1();
554 size = 2;
555 }
556 apply {
557 tbl for stmt 1.apply();
558 bf2 tbl set key.apply();
559 bf2 ds.apply(ig md.bf2 key,
560 ig md.bf2 api,
561 ig intr md.ingress mac tstamp,
562 ig md.solicited);
563 tbl for stmt 3.apply();
564 }
565 }
566
567 control SwitchIngressDeparser(packet out pkt,
568 inout header t hdr,
569 in metadata t ig md,
570 in ingress intrinsic metadata for deparser t
ig intr dprsr md)
571 {
572 apply {
573 pkt.emit(hdr);
574 }
575 }
576
577 parser SwitchEgressParser(packet in pkt,
578 out header t hdr,
579 out metadata t eg md,
580 out egress intrinsic metadata t eg intr md) {
581 TofinoEgressParser() tofino parser;
582 EtherIPTCPUDPParser() layer4 parser;
583 state start {
584 tofino parser.apply(pkt, eg intr md);
585 layer4 parser.apply(pkt, hdr);
586 transition accept;
587 }
588 }
589
590 control SwitchEgress(inout header t hdr,
591 inout metadata t eg md,
592 in egress intrinsic metadata t eg intr md,
593 in egress intrinsic metadata from parser t eg intr from prsr,
129

594 inout egress intrinsic metadata for deparser t
eg intr md for dprsr,
595 inout egress intrinsic metadata for output port t
eg intr md for oport)
596 {
597 apply { }
598 }
599
600 control SwitchEgressDeparser(packet out pkt,
601 inout header t hdr,
602 in metadata t eg md,
603 in egress intrinsic metadata for deparser t
eg intr dprsr md)
604 {
605 apply {
606 pkt.emit(hdr);
607 }
608 }
609
610 Pipeline(SwitchIngressParser(), SwitchIngress(), SwitchIngressDeparser(),
SwitchEgressParser(), SwitchEgress(), SwitchEgressDeparser()) pipe;
611
612 Switch(pipe) main;
A.2 Concrete functional model
This is the complete version of the program that was excerpted in Section 5.3.1.
1 #define NOOP 0
2 #define CLEAR 1
3 #define INSERT 2
4 #define QUERY 3
5 #define INSQUERY 4
6 #define UPDATE 5
7 #define UPDQUERY 6
8 #define DONTCARE 0
9 #define QDEFAULT 0
10
11 #include <core.p4>
12 #include <tna.p4>
13 #include ”common/headers.p4”
130

14 #include ”common/util.p4”
15
16
17 typedef bit<8> api t;
18
19 typedef bit<16> window t;
20
21 typedef bit<4> pred t;
22
23 typedef bit<18> bf2 index t;
24
25 typedef bit<8> bf2 value t;
26
27 typedef bit<64> bf2 key t;
28
29 struct bf2 win md t {
30 api t api;
31 bf2 index t index 1;
32 bf2 index t index 2;
33 bf2 index t index 3;
34 bf2 value t rw 1;
35 bf2 value t rw 2;
36 bf2 value t rw 3;
37 }
38
39 struct bf2 ds md t {
40 window t clear window;
41 bf2 index t clear index 1;
42 bf2 index t hash index 1;
43 bf2 index t hash index 2;
44 bf2 index t hash index 3;
45 bf2 win md t win 1;
46 bf2 win md t win 2;
47 bf2 win md t win 3;
48 bf2 win md t win 4;
49 }
50
51 struct metadata t {
52 bf2 key t bf2 key;
53 api t bf2 api;
54 bit<8> solicited;
55 }
56
57 struct window pair t {
58 window t lo;
131

59 window t hi;
60 }
61
62 parser EtherIPTCPUDPParser(packet in pkt, out header t hdr) {
63 state start {
64 transition parse ethernet;
65 }
66 state parse ethernet {
67 pkt.extract(hdr.ethernet);
68 transition select(hdr.ethernet.ether type) {
69 ETHERTYPE IPV4 : parse ipv4;
70 : reject;
71 }
72 }
73 state parse ipv4 {
74 pkt.extract(hdr.ipv4);
75 transition select(hdr.ipv4.protocol) {
76 IP PROTOCOLS TCP : parse tcp;
77 IP PROTOCOLS UDP : parse udp;
78 : accept;
79 }
80 }
81 state parse tcp {
82 pkt.extract(hdr.tcp);
83 transition accept;
84 }
85 state parse udp {
86 pkt.extract(hdr.udp);
87 transition accept;
88 }
89 }
90
91 parser SwitchIngressParser(packet in pkt,
92 out header t hdr,
93 out metadata t ig md,
94 out ingress intrinsic metadata t ig intr md) {
95 TofinoIngressParser() tofino parser;
96 EtherIPTCPUDPParser() layer4 parser;
97 state start {
98 tofino parser.apply(pkt, ig intr md);
99 layer4 parser.apply(pkt, hdr);
100 transition accept;
101 }
102 }
103
132
104 control Bf2BloomFilterRow(in api t api,
105 in bf2 index t index,
106 out bf2 value t rw) {
107 Register<bf2 value t, bf2 index t>(32w262144, 8w0) reg row;
108 RegisterAction<bf2 value t, bf2 index t, bf2 value t>(reg row) regact insert = {
109 void apply(inout bf2 value t value, out bf2 value t rv) {
110 value = 8w1;
111 rv = 8w1;
112 }
113 };
114 action act insert() {
115 rw = regact insert.execute(index);
116 }
117 RegisterAction<bf2 value t, bf2 index t, bf2 value t>(reg row) regact query = {
118 void apply(inout bf2 value t value, out bf2 value t rv) {
119 rv = value;
120 }
121 };
122 action act query() {
123 rw = regact query.execute(index);
124 }
125 RegisterAction<bf2 value t, bf2 index t, bf2 value t>(reg row) regact clear = {
126 void apply(inout bf2 value t value, out bf2 value t rv) {
127 value = 8w0;
128 rv = 8w0;
129 }
130 };
131 action act clear() {
132 rw = regact clear.execute(index);
133 }
134 table tbl bloom {
135 key = {
136 api : ternary;
137 }
138 actions = {
139 act insert();
140 act query();
141 act clear();
142 .NoAction();
143 }
144 const entries = {
145 INSERT : act insert();
146 QUERY : act query();
147 CLEAR : act clear();
148 : .NoAction();
133

149 }
150 default action = .NoAction();
151 size = 4;
152 }
153 apply {
154 tbl bloom.apply();
155 }
156 }
157
158 control Bf2BloomFilterWin(inout bf2 win md t win md) {
159 Bf2BloomFilterRow() row 1;
160 Bf2BloomFilterRow() row 2;
161 Bf2BloomFilterRow() row 3;
162 apply {
163 row 1.apply(win md.api, win md.index 1, win md.rw 1);
164 row 2.apply(win md.api, win md.index 2, win md.rw 2);
165 row 3.apply(win md.api, win md.index 3, win md.rw 3);
166 }
167 }
168
169 control Bf2BloomFilter(in bf2
key t ds key,
170 in api t api,
171 in bit<48> ingress mac tstamp,
172 inout bf2 value t query res) {
173 bf2 ds md t ds md;
174 CRCPolynomial<bit<32>>(32w79764919, true, false, false, 32w0, 32w4294967295
) poly idx 1;
175 Hash<bit<32>>(HashAlgorithm t.CUSTOM, poly idx 1) hash idx 1;
176 action act hash index 1() {
177 ds md.hash index 1 = hash idx 1.get(ds key)[17:0];
178 }
179 table tbl hash index 1 {
180 actions = {
181 act hash index 1();
182 }
183 default action = act hash index 1();
184 size = 1;
185 }
186 CRCPolynomial<bit<32>>(32w517762881, true, false, false, 32w0, 32
w4294967295) poly idx 2;
187 Hash<bit<32>>(HashAlgorithm t.CUSTOM, poly idx 2) hash idx 2;
188 action act hash index 2() {
189 ds md.hash index 2 = hash idx 2.get(ds key)[17:0];
190 }
191 table tbl hash index 2 {
134

192 actions = {
193 act hash index 2();
194 }
195 default action = act hash index 2();
196 size = 1;
197 }
198 CRCPolynomial<bit<32>>(32w2821953579, true, false, false, 32w0, 32
w4294967295) poly idx 3;
199 Hash<bit<32>>(HashAlgorithm t.CUSTOM, poly idx 3) hash idx 3;
200 action act hash index 3() {
201 ds md.hash index 3 = hash idx 3.get(ds key)[17:0];
202 }
203 table tbl hash index 3 {
204 actions = {
205 act hash index 3();
206 }
207 default action = act hash index 3();
208 size = 1;
209 }
210 Register<bit<32>, bit<1>>(32w1, 32w0) reg clear index;
211 RegisterAction<bit<32>, bit<1>, bit<32>>(reg clear index) regact clear index =
{
212 void apply(inout bit<32> val, out bit<32> rv) {
213 rv = val;
214 val = (val + 32w1);
215 }
216 };
217 action act clear index() {
218 ds md.clear index 1 = regact clear index.execute(1w0)[17:0];
219 }
220 table tbl clear index {
221 actions = {
222 act clear index();
223 }
224 default action = act clear index();
225 size = 1;
226 }
227 Register<window pair t, bit<1>>(32w1, {16w0, 16w0}) reg clear window;
228 RegisterAction<window pair t, bit<1>, window t>(reg clear window)
regact clear window signal 0 = {
229 void apply(inout window pair t val, out window t rv) {
230 bool flip = (val.lo != 16w0);
231 bool wrap = (val.hi == 16w28135);
232 if (flip)
233 {
135

234 if (wrap)
235 {
236 val.lo = 16w0;
237 val.hi = 16w0;
238 }
239 else
240 {
241 val.lo = 16w0;
242 val.hi = (val.hi + 16w1);
243 }
244 }
245 else
246 {
247 val.lo = val.lo;
248 val.hi = val.hi;
249 }
250 rv = val.hi;
251 }
252 };
253 RegisterAction<window pair t, bit<1>, window t>(reg clear window)
regact clear window signal 1 = {
254 void apply(inout window pair t val, out window t rv) {
255 if ((val.lo != 16w1))
256 {
257 val.lo = 16w1;
258 }
259 rv = val.hi;
260 }
261 };
262 action act clear window signal 0() {
263 ds md.clear window = regact clear window signal 0.execute(1w0);
264 }
265 action act clear window signal 1() {
266 ds md.clear window = regact clear window signal 1.execute(1w0);
267 }
268 table tbl clear window {
269 key = {
270 ingress mac tstamp : ternary;
271 }
272 actions = {
273 act clear window signal 0();
274 act clear window signal 1();
275 }
276 const entries = {
277 48w0 &&& 48w2097152 : act clear window signal 0();
136

278 : act clear window signal 1();
279 }
280 default action = act clear window signal 1();
281 size = 2;
282 }
283 action act set clear win 1(bit<8> api 1,
284 bit<8> api 2,
285 bit<8> api 3,
286 bit<8> api 4) {
287 ds md.win 1.index 1 = ds md.clear index 1;
288 ds md.win 1.index 2 = ds md.clear index 1;
289 ds md.win 1.index 3 = ds md.clear index 1;
290 ds md.win 2.index 1 = ds md.hash index 1;
291 ds md.win 2.index 2 = ds md.hash index 2;
292 ds md.win 2.index 3 = ds md.hash index 3;
293 ds md.win 3.index 1 = ds md.hash index 1;
294 ds md.win 3.index 2 = ds md.hash index 2;
295 ds md.win 3.index 3 = ds md.hash index 3;
296 ds md.win 4.index 1 = ds md.hash index 1;
297 ds md.win 4.index 2 = ds md.hash index 2;
298 ds md.win 4.index 3 = ds md.hash index 3;
299 ds md.win 1.api = api 1;
300 ds md.win 2.api = api 2;
301 ds md.win 3.api = api 3;
302 ds md.win 4.api = api 4;
303 }
304 action act set clear win 2(bit<8> api 1,
305 bit<8> api 2,
306 bit<8> api 3,
307 bit<8> api 4) {
308 ds md.win 1.index 1 = ds md.hash index 1;
309 ds md.win 1.index 2 = ds md.hash index 2;
310 ds md.win 1.index 3 = ds md.hash index 3;
311 ds md.win 2.index 1 = ds md.clear index 1;
312 ds md.win 2.index 2 = ds md.clear index 1;
313 ds md.win 2.index 3 = ds md.clear index 1;
314 ds md.win 3.index 1 = ds md.hash index 1;
315 ds md.win 3.index 2 = ds md.hash index 2;
316 ds md.win 3.index 3 = ds md.hash index 3;
317 ds md.win 4.index 1 = ds md.hash index 1;
318 ds md.win 4.index 2 = ds md.hash index 2;
319 ds md.win 4.index 3 = ds md.hash index 3;
320 ds md.win 1.api = api 1;
321 ds md.win 2.api = api 2;
322 ds md.win 3.api = api 3;
137

323 ds md.win 4.api = api 4;
324 }
325 action act set clear win 3(bit<8> api 1,
326 bit<8> api 2,
327 bit<8> api 3,
328 bit<8> api 4) {
329 ds md.win 1.index 1 = ds md.hash index 1;
330 ds md.win 1.index 2 = ds md.hash index 2;
331 ds md.win 1.index 3 = ds md.hash index 3;
332 ds md.win 2.index 1 = ds md.hash index 1;
333 ds md.win 2.index 2 = ds md.hash index 2;
334 ds md.win 2.index 3 = ds md.hash index 3;
335 ds md.win 3.index 1 = ds md.clear index 1;
336 ds md.win 3.index 2 = ds md.clear index 1;
337 ds md.win 3.index 3 = ds md.clear index 1;
338 ds md.win 4.index 1 = ds md.hash index 1;
339 ds md.win 4.index 2 = ds md.hash index 2;
340 ds md.win 4.index 3 = ds md.hash index 3;
341 ds md.win 1.api = api 1;
342 ds md.win 2.api = api 2;
343 ds md.win 3.api = api 3;
344 ds md.win 4.api = api 4;
345 }
346 action act set clear win 4(bit<8> api 1,
347 bit<8> api 2,
348 bit<8> api 3,
349 bit<8> api 4) {
350 ds md.win 1.index 1 = ds md.hash index 1;
351 ds md.win 1.index 2 = ds md.hash index 2;
352 ds md.win 1.index 3 = ds md.hash index 3;
353 ds md.win 2.index 1 = ds md.hash index 1;
354 ds md.win 2.index 2 = ds md.hash index 2;
355 ds md.win 2.index 3 = ds md.hash index 3;
356 ds md.win 3.index 1 = ds md.hash index 1;
357 ds md.win 3.index 2 = ds md.hash index 2;
358 ds md.win 3.index 3 = ds md.hash index 3;
359 ds md.win 4.index 1 = ds md.clear index 1;
360 ds md.win 4.index 2 = ds md.clear index 1;
361 ds md.win 4.index 3 = ds md.clear index 1;
362 ds md.win 1.api = api 1;
363 ds md.win 2.api = api 2;
364 ds md.win 3.api = api 3;
365 ds md.win 4.api = api 4;
366 }
367 table tbl set win {
138

368 key = {
369 api : ternary;
370 ds md.clear window : range;
371 }
372 actions = {
373 act set clear win 1();
374 act set clear win 2();
375 act set clear win 3();
376 act set clear win 4();
377 .NoAction();
378 }
379 const entries = {
380 (INSERT, 16w0 .. 16w7033) : act set clear win 1(CLEAR,
381 NOOP,
382 NOOP,
383 INSERT);
384 (INSERT, 16w7034 .. 16w14067) : act set clear win 2(INSERT,
385 CLEAR,
386 NOOP,
387 NOOP);
388 (INSERT, 16w14068 .. 16w21101) : act
set clear win 3(NOOP,
389 INSERT,
390 CLEAR,
391 NOOP);
392 (INSERT, 16w21102 .. 16w28135) : act set clear win 4(NOOP,
393 NOOP,
394 INSERT,
395 CLEAR);
396 (QUERY, 16w0 .. 16w7033) : act set clear win 1(CLEAR,
397 QUERY,
398 QUERY,
399 QUERY);
400 (QUERY, 16w7034 .. 16w14067) : act set clear win 2(QUERY,
401 CLEAR,
402 QUERY,
403 QUERY);
404 (QUERY, 16w14068 .. 16w21101) : act set clear win 3(QUERY,
405 QUERY,
406 CLEAR,
407 QUERY);
408 (QUERY, 16w21102 .. 16w28135) : act set clear win 4(QUERY,
409 QUERY,
410 QUERY,
411 CLEAR);
412 (CLEAR, 16w0 .. 16w7033) : act set clear win 1(CLEAR,
139

413 NOOP,
414 NOOP,
415 NOOP);
416 (CLEAR, 16w7034 .. 16w14067) : act set clear win 2(NOOP,
417 CLEAR,
418 NOOP,
419 NOOP);
420 (CLEAR, 16w14068 .. 16w21101) : act set clear win 3(NOOP,
421 NOOP,
422 CLEAR,
423 NOOP);
424 (CLEAR, 16w21102 .. 16w28135) : act set clear win 4(NOOP,
425 NOOP,
426 NOOP,
427 CLEAR);
428 ( , ) : .NoAction();
429 }
430 default action = .NoAction();
431 size = 13;
432 }
433 Bf2BloomFilterWin() win 1;
434 Bf2BloomFilterWin() win 2;
435 Bf2BloomFilterWin() win 3;
436 Bf2BloomFilterWin() win 4;
437 action act merge wins() {
438 query res = 8w1;
439 }
440 action act merge default() {
441 query res = 8w0;
442 }
443 table tbl merge wins {
444 key = {
445 api : ternary;
446 ds md.win 1.rw 1 : ternary;
447 ds md.win 1.rw 2 : ternary;
448 ds md.win 1.rw 3 : ternary;
449 ds md.win 2.rw 1 : ternary;
450 ds md.win 2.rw 2 : ternary;
451 ds md.win 2.rw 3 : ternary;
452 ds md.win 3.rw 1 : ternary;
453 ds md.win 3.rw 2 : ternary;
454 ds md.win 3.rw 3 : ternary;
455 ds md.win 4.rw 1 : ternary;
456 ds md.win 4.rw 2 : ternary;
457 ds md.win 4.rw 3 : ternary;
140

458 }
459 actions = {
460 act merge wins();
461 act merge default();
462 .NoAction();
463 }
464 const entries = {
465 (QUERY, 8w1, 8w1, 8w1, , , , , , , , , ) : act merge wins();
466 (QUERY, , , , 8w1, 8w1, 8w1, , , , , , ) : act merge wins();
467 (QUERY, , , , , , , 8w1, 8w1, 8w1, , , ) : act merge wins();
468 (QUERY, , , , , , , , , , 8w1, 8w1, 8w1) : act merge wins();
469 (QUERY, , , , , , , , , , , , ) : act merge default();
470 ( , , , , , , , , , , , , ) : .NoAction();
471 }
472 default action = .NoAction();
473 size = 6;
474 }
475 apply {
476 tbl hash index 1.apply();
477 tbl hash index 2.apply();
478 tbl hash index 3.apply();
479 tbl clear index.apply();
480 tbl clear window.apply();
481 tbl set win.apply();
482 win 1.apply(ds md.win 1);
483 win 2.apply(ds md.win 2);
484 win 3.apply(ds md.win 3);
485 win 4.apply(ds md.win 4);
486 tbl merge wins.apply();
487 }
488 }
489
490 control SwitchIngress(inout header t hdr,
491 inout metadata t ig md,
492 in ingress intrinsic metadata t ig intr md,
493 in ingress intrinsic metadata from parser t ig intr prsr md,
494 inout ingress intrinsic metadata for deparser t ig intr dprsr md,
495 inout ingress intrinsic metadata for tm t ig intr tm md)
496 {
497 action act for tbl 1 action 0() {
498 ig md.solicited = 1;
499 }
500 table tbl for stmt 1 {
501 actions = {
502 act for tbl 1 action 0();
141

503 }
504 default action = act for tbl 1 action 0();
505 size = 1;
506 }
507 action bf2 act set insert key(bit<8> api) {
508 ig md.bf2 api = api;
509 ig md.bf2 key = (hdr.ipv4.dst addr ++ hdr.ipv4.src addr);
510 }
511 action bf2 act set query key(bit<8> api) {
512 ig md.bf2 api = api;
513 ig md.bf2 key = (hdr.ipv4.src addr ++ hdr.ipv4.dst addr);
514 }
515 action bf2 act set clear key() {
516 ig md.bf2 api = CLEAR;
517 }
518 table bf2 tbl set key {
519 key = {
520 hdr.ipv4.src addr : ternary;
521 }
522 actions = {
523 bf2 act set insert key();
524 bf2 act set query key();
525 bf2 act set clear key();
526 }
527 const entries = {
528 2154823680 &&& 4294901760 : bf2 act set insert key(INSERT);
529 : bf2 act set query key(QUERY);
530 }
531 default action = bf2 act set clear key();
532 size = 2;
533 }
534 Bf2BloomFilter() bf2 ds;
535 action act for tbl 3 action 0() {
536 ig intr dprsr md.drop ctl = 1;
537 }
538 action act for tbl 3 action 1() {
539 ig intr dprsr md.drop ctl = 0;
540 }
541 table tbl for stmt 3 {
542 key = {
543 ig md.solicited : ternary;
544 }
545 actions = {
546 act for tbl 3 action 0();
547 act for tbl 3 action 1();
142
548 }
549 const entries = {
550 0 : act for tbl 3 action 0();
551 : act for tbl 3 action 1();
552 }
553 default action = act for tbl 3 action 1();
554 size = 2;
555 }
556 apply {
557 tbl for stmt 1.apply();
558 bf2 tbl set key.apply();
559 bf2 ds.apply(ig md.bf2 key,
560 ig md.bf2 api,
561 ig intr md.ingress mac tstamp,
562 ig md.solicited);
563 tbl for stmt 3.apply();
564 }
565 }
566
567 control SwitchIngressDeparser(packet out pkt,
568 inout header t hdr,
569 in metadata t ig md,
570 in ingress intrinsic metadata for deparser t
ig intr dprsr md)
571 {
572 apply {
573 pkt.emit(hdr);
574 }
575 }
576
577 parser SwitchEgressParser(packet in pkt,
578 out header t hdr,
579 out metadata t eg md,
580 out egress intrinsic metadata t eg intr md) {
581 TofinoEgressParser() tofino parser;
582 EtherIPTCPUDPParser() layer4 parser;
583 state start {
584 tofino parser.apply(pkt, eg intr md);
585 layer4 parser.apply(pkt, hdr);
586 transition accept;
587 }
588 }
589
590 control SwitchEgress(inout header t hdr,
591 inout metadata t eg md,
143
592 in egress intrinsic metadata t eg intr md,
593 in egress intrinsic metadata from parser t eg intr from prsr,
594 inout egress intrinsic metadata for deparser t
eg intr md for dprsr,
595 inout egress intrinsic metadata for output port t
eg intr md for oport)
596 {
597 apply { }
598 }
599
600 control SwitchEgressDeparser(packet out pkt,
601 inout header t hdr,
602 in metadata t eg md,
603 in egress intrinsic metadata for deparser t
eg intr dprsr md)
604 {
605 apply {
606 pkt.emit(hdr);
607 }
608 }
609
610 Pipeline(SwitchIngressParser(), SwitchIngress(), SwitchIngressDeparser(),
SwitchEgressParser(), SwitchEgress(), SwitchEgressDeparser()) pipe;
611
612 Switch(pipe) main;
144
Bibliography
[1] Andrew W. Appel, Robert Dockins, Aquinas Hobor, Lennart Beringer, Josiah
Dodds, Gordon Stewart, Sandrine Blazy, and Xavier Leroy. Program logics for
certified compilers. Cambridge University Press, 2014.
[2] Andrew W. Appel and David McAllester. An indexed model of recursive types
for foundational proof-carrying code. ACM Transactions on Programming Lan-
guages and Systems (TOPLAS), 23(5):657–683, 2001.
[3] Sandrine Blazy and Xavier Leroy. Mechanized semantics for the Clight subset
of the C language. Journal of Automated Reasoning, 43(3):263–288, 2009.
[4] Burton H. Bloom. Space/time trade-offs in hash coding with allowable errors.
Communications of the ACM, 13(7):422–426, 1970.
[5] Pat Bosshart, Dan Daly, Glen Gibb, Martin Izzard, Nick McKeown, Jennifer
Rexford, Cole Schlesinger, Dan Talayco, Amin Vahdat, George Varghese, et al.
P4: Programming protocol-independent packet processors. ACM SIGCOMM
Computer Communication Review, 44(3):87–95, 2014.
[6] Cristian Cadar, Daniel Dunbar, and Dawson R. Engler. KLEE: unassisted and
automatic generation of high-coverage tests for complex systems programs. In
Richard Draves and Robbert van Renesse, editors, 8th USENIX Symposium
on Operating Systems Design and Implementation, OSDI 2008, December 8-
10, 2008, San Diego, California, USA, Proceedings, pages 209–224. USENIX
Association, 2008.
[7] Qinxiang Cao, Lennart Beringer, Samuel Gruetter, Josiah Dodds, and An-
drew W. Appel. VST-Floyd: A separation logic tool to verify correctness of
C programs. Journal of Automated Reasoning, 61:367–422, 2018.
[8] Henry Cejtin, Suresh Jagannathan, and Stephen Weeks. Flow-directed closure
conversion for typed languages. In Programming Languages and Systems: 9th
European Symposium on Programming, pages 56–71. Springer, 2000.
[9] Xiaoqi Chen, Shir Landau-Feibish, Mark Braverman, and Jennifer Rexford.
Beaucoup: Answering many network traffic queries, one memory update at a
time. In Proceedings of the Annual Conference of the ACM Special Interest Group
145
on Data Communication on the Applications, Technologies, Architectures, and
Protocols for Computer Communication, SIGCOMM ’20, page 226–239, New
York, NY, USA, 2020. Association for Computing Machinery.
[10] Adam Chlipala. Certified Programming with Dependent Types. MIT Press, 2013.
[11] Joshua M Cohen, Qinshi Wang, and Andrew W. Appel. Verified erasure correc-
tion in Coq with MathComp and VST. In Computer Aided Verification: 34th
International Conference, CAV 2022, pages 272–292. Springer, 2022.
[12] The P4 Language Consortium. P4
16
language specification, version 1.2.3. Tech-
nical report, July 2022.
[13] Patrick Cousot and Radhia Cousot. Abstract interpretation: a unified lattice
model for static analysis of programs by construction or approximation of fix-
points. In Proceedings of the 4th ACM SIGACT-SIGPLAN symposium on Prin-
ciples of Programming Languages, pages 238–252, 1977.
[14] Pascal Cuoq, Florent Kirchner, Nikolai Kosmatov, Virgile Prevosto, Julien Sig-
noles, and Boris Yakobowski. Frama-C: A software analysis perspective. In Soft-
ware Engineering and Formal Methods: 10th International Conference, SEFM
2012, pages 233–247. Springer, 2012.
[15] Leonardo De Moura and Nikolaj Bjørner. Z3: An efficient SMT solver. In Inter-
national conference on Tools and Algorithms for the Construction and Analysis
of Systems, pages 337–340. Springer, 2008.
[16] David Delahaye. A tactic language for the system Coq. In International Confer-
ence on Logic for Programming and Automated Reasoning (LPAR), pages 85–95.
Springer, 2000.
[17] Edsger W. Dijkstra. Guarded commands, nondeterminacy and formal derivation
of programs. Communications of the ACM, 18(8):453–457, 1975.
[18] Ryan Doenges, Mina Tahmasbi Arashloo, Santiago Bautista, Alexander Chang,
Newton Ni, Samwise Parkinson, Rudy Peterson, Alaia Solko-Breslin, Amanda
Xu, and Nate Foster. Petr4: formal foundations for P4 data planes. Proceedings
of the ACM on Programming Languages, 5(POPL), 2021.
[19] Ryan Doenges, Tobias Kapp´e, John Sarracino, Nate Foster, and Greg Mor-
risett. Leapfrog: certified equivalence for protocol parsers. In Proceedings of
the 43rd ACM SIGPLAN International Conference on Programming Language
Design and Implementation, pages 950–965, 2022.
[20] Matthias Eichholz, Eric Hayden Campbell, Matthias Krebs, Nate Foster, and
Mira Mezini. Dependently-typed data plane programming. Proceedings of the
ACM on Programming Languages, 6(POPL):1–28, 2022.
146
[21] Ronghui Gu, J´er´emie Koenig, Tahina Ramananandro, Zhong Shao, Xiongnan
Wu, Shu-Chun Weng, Haozhong Zhang, and Yu Guo. Deep specifications and
certified abstraction layers. ACM SIGPLAN Notices, 50(1):595–608, 2015.
[22] Frederik Hauser, Marco H¨aberle, Daniel Merling, Steffen Lindner, Vladimir
Gurevich, Florian Zeiger, Reinhard Frank, and Michael Menth. A survey on
data plane programming with P4: Fundamentals, advances, and applied research.
Journal of Network and Computer Applications, 212:103561, 2023.
[23] Intel. Intel® Tofino™ programmable ethernet switch ASIC.
https://www.intel.com/content/www/us/en/products/network-io/
programmable-ethernet-switch/tofino-series.html. Accessed: 2023-
01-18.
[24] Xin Jin, Xiaozhou Li, Haoyu Zhang, Robert Soul´e, Jeongkeun Lee, Nate Foster,
Changhoon Kim, and Ion Stoica. Netcache: Balancing key-value stores with fast
in-network caching. In Proceedings of the 26th Symposium on Operating Systems
Principles, SOSP ’17, page 121–136, New York, NY, USA, 2017. Association for
Computing Machinery.
[25] Thomas Kleymann. Hoare logic and VDM: Machine-checked soundness and com-
pleteness proofs. PhD thesis, University of Edinburgh, 1998.
[26] K Rustan M Leino. Dafny: An automatic program verifier for functional cor-
rectness. In Logic for Programming, Artificial Intelligence, and Reasoning: 16th
International Conference, LPAR-16, pages 348–370. Springer, 2010.
[27] Yuliang Li, Rui Miao, Changhoon Kim, and Minlan Yu. Flowradar: A bet-
ter netflow for data centers. In Proceedings of the 13th Usenix Conference on
Networked Systems Design and Implementation, NSDI’16, page 311–324, USA,
2016. USENIX Association.
[28] Jed Liu, William Hallahan, Cole Schlesinger, Milad Sharif, Jeongkeun Lee,
Robert Soul´e, Han Wang, C˘alin Ca¸scaval, Nick McKeown, and Nate Foster.
p4v: Practical verification for programmable data planes. In Proceedings of the
2018 Conference of the ACM Special Interest Group on data communication,
pages 490–503, 2018.
[29] David MacQueen. An implementation of standard ML modules. In Proceedings of
the 1988 ACM Conference on LISP and Functional Programming, LFP ’88, pages
212–223, New York, NY, USA, 1988. Association for Computing Machinery.
[30] Rui Miao, Hongyi Zeng, Changhoon Kim, Jeongkeun Lee, and Minlan Yu.
Silkroad: Making stateful layer-4 load balancing fast and cheap using switch-
ing asics. In Proceedings of the Conference of the ACM Special Interest Group
on Data Communication, SIGCOMM ’17, page 15–28, New York, NY, USA,
2017. Association for Computing Machinery.
147
[31] Hun Namkung, Zaoxing Liu, Daehyeok Kim, Vyas Sekar, and Peter Steenkiste.
SketchLib: Enabling efficient sketch-based monitoring on programmable
switches. In 19th USENIX Symposium on Networked Systems Design and Im-
plementation (NSDI 22), pages 743–759, Renton, WA, April 2022. USENIX As-
sociation.
[32] Moni Naor and Eylon Yogev. Tight bounds for sliding bloom filters. Algorithmica,
73(4):652–672, 2015.
[33] Miguel Neves, Lucas Freire, Alberto Schaeffer-Filho, and Marinho Barcellos. Ver-
ification of P4 programs in feasible time using assertions. In Proceedings of the
14th International Conference on Emerging Networking EXperiments and Tech-
nologies, pages 73–85, 2018.
[34] Samir Palnitkar. Verilog HDL: a guide to digital design and synthesis. Prentice
Hall Professional, 2003. pages 30-33.
[35] Mengying Pan. CtrlApp: A query-based language for control applications on
data plane. https://github.com/MollyDream/CtrlApp.
[36] Benjamin C. Pierce, Arthur Azevedo de Amorim, Chris Casinghino, Marco
Gaboardi, Michael Greenberg, C˘at˘alin Hrit¸cu, Vilhelm Sj¨oberg, Andrew Tol-
mach, and Brent Yorgey. Programming Language Foundations, volume 2
of Software Foundations. Electronic textbook, 2022. Version 6.2, http:
//softwarefoundations.cis.upenn.edu.
[37] Benjamin C. Pierce, Arthur Azevedo de Amorim, Chris Casinghino, Marco
Gaboardi, Michael Greenberg, C˘at˘alin Hrit¸cu, Vilhelm Sj¨oberg, and Brent
Yorgey. Logical Foundations, volume 1 of Software Foundations. Electronic
textbook, 2022. Version 6.2, http://softwarefoundations.cis.upenn.edu.
[38] Fabian Ruffy, Tao Wang, and Anirudh Sivaraman. Gauntlet: Finding bugs in
compilers for programmable packet processing. In 14th USENIX Symposium on
Operating Systems Design and Implementation (OSDI 20), pages 683–699, 2020.
[39] John Sonchack, Devon Loehr, Jennifer Rexford, and David Walker. Lucid: A lan-
guage for control in the data plane. In Proceedings of the 2021 ACM SIGCOMM
2021 Conference, pages 731–747, 2021.
[40] Radu Stoenescu, Dragos Dumitrescu, Matei Popovici, Lorina Negreanu, and
Costin Raiciu. Debugging P4 programs with Vera. In Proceedings of the 2018
Conference of the ACM Special Interest Group on Data Communication, pages
518–532, 2018.
[41] Radu Stoenescu, Matei Popovici, Lorina Negreanu, and Costin Raiciu. SymNet:
Scalable symbolic execution for modern networks. In Proceedings of the 2016
ACM SIGCOMM Conference, pages 314–327, 2016.
148
[42] Bingchuan Tian, Jiaqi Gao, Mengqi Liu, Ennan Zhai, Yanqing Chen, Yu Zhou,
Li Dai, Feng Yan, Mengjing Ma, Ming Tang, Chen Tian, and Minlan Yu. Aquila:
a practically usable verification system for production-scale programmable data
planes. In Proceedings of the 2021 ACM SIGCOMM 2021 Conference, pages
17–32, 2021.
[43] Verified Network Toolchain. petr4/coq/lib/P4light at Feb2023. https:
//github.com/verified-network-toolchain/petr4/tree/Feb2023/coq/
lib/P4light. Accessed: 2023-03-07.
[44] Qinshi Wang and Andrew W. Appel. A solver for arrays with concatenation.
Journal of Automated Reasoning, 67(1):4, 2023.
[45] Qinshi Wang, Mengying Pan, Shengyi Wang, Ryan Doenges, Lennart Beringer,
and Andrew W. Appel. Foundational verification of stateful P4 packet pro-
cessing. In 14th International Conference on Interactive Theorem Proving (ITP
2023), 2023.
[46] Zhuolong Yu, Yiwen Zhang, Vladimir Braverman, Mosharaf Chowdhury, and Xin
Jin. Netlock: Fast, centralized lock management using programmable switches.
In Proceedings of the Annual Conference of the ACM Special Interest Group
on Data Communication on the Applications, Technologies, Architectures, and
Protocols for Computer Communication, SIGCOMM ’20, page 126–138, New
York, NY, USA, 2020. Association for Computing Machinery.
149
