
Time Response of First Order Systems
Consider a general first order transfer function (strictly proper)
G(s) =
G(s)
R(s)
=
b
0
s + a
0
It is common also to write G(s) as
G(s) =
K
τs + 1
=
b
0
s + a
0
i.e.,
a
0
=
1
τ
; b
0
=
K
τ
Example:
G(s) =
3
s + 2
=
1.5
0.5s + 1
a
0
= 2 , b
0
= 3
τ = 0.5 , K = 1.5
The pole of the system is at s = −a
0
or s = −1/τ. τ is called the time constant. K is called the DC-gain
or steady state gain.
What is the differential equation corresponding to the input/output system
c(s) =
K
τs + 1
R(s)
becomes
(s + 1/τ)C(s) = K/τ R(s)
which is equivalent to
˙c(t) +
1
τ
c(t) = K/τ r(t)
Let us consider the effect of both the input r(t) and the initial condition c(0). Taking Laplace Transform
of the differentiation equation — this time including the initial condition yields
sC(s) − c(0) +
1
τ
c(s) =
K
τ
R(s)
1
or
c(s) =
c(0)
s + 1/τ
+
K/τ
s + 1/τ
R(s).
Note that the initial condition could be represented in the differential equation by an input c(0)δ(t) where
δ is the unit impulse function
˙c(t) +
1
τ
c(t) =
K
τ
r(t) + c(0)δ?
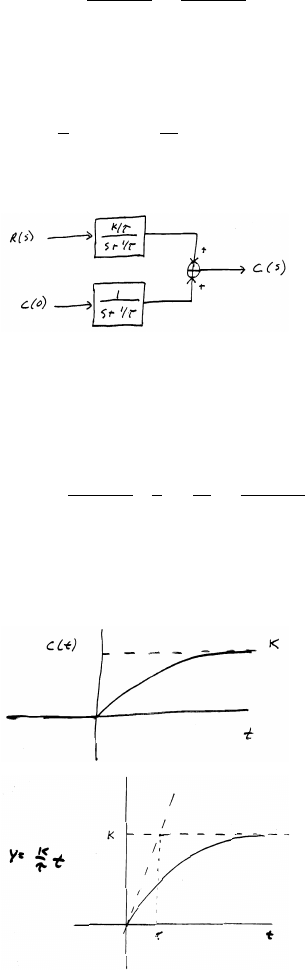
In block diagram from we have
By superposition the response of the system is the sum of the response due to the initial condition alone
(the free response) and the response due to the input R(s) (the forced response).
If R(s) = u(t), the unit step function, then the force response (step response) is given (with zero condition)
as
c(s) =
k/τ
s + 1/τ
·
1
s
=
K
s
−
K
s + 1/τ
.
In the time domain
c(t) = K(1 − e
−t/τ
)u(t)
If the response continued to increase at its initial rate it would reach its steady state value K after τ-seconds.
We see that the forced response is composed of two terms
−Ke
−t/τ
called the transient response and
K
called the steady state response.
2
Then slope of c(t) at t = 0 is
d
dt
c(t)
t=0
=
K
τ
e
−t/τ
t=0
=
K
τ
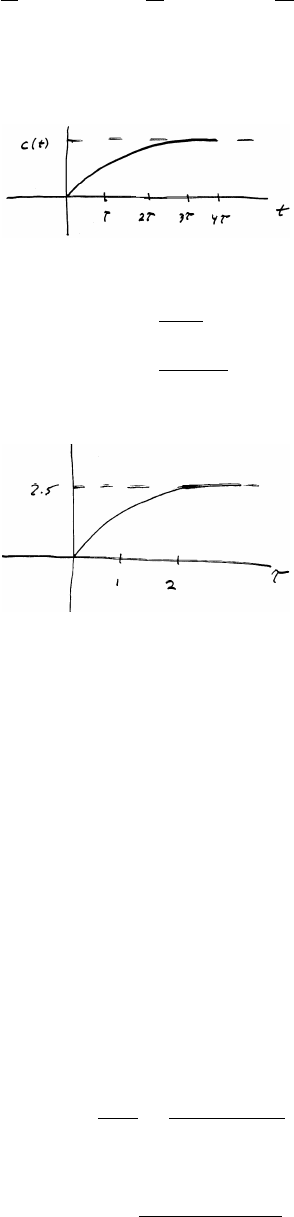
To say it another way the transient response would decay to zero after τ-seconds. In practice we say that
the system reaches about 63% (1 − e
−1
= .37) after one time constant and has reached steady state after
four time constants.
Example:
G(s) =
5
s + 2
=
2.5
0.5s + 1
The time constant τ = 0.5 and the steady state value to a unit step input is 2.5.
The classification of system response into
– forced response
– free response
and
– transient response
– steady state response
is not limited to first order systems but applies to transfer functions G(s) of any order.
The DC-gain of any transfer function is defined as G(0) and is the steady state value of the system to a
unit step input, provided that the system has a steady state value. This follows from the final value theorem
lim
t→∞
c(t) = lim
s→0
sC(s) = lim
s→0
sG(s)R(s)
= G(0) if R(s) = 1/s
provided sC(s) has no poles in the right half plane.
Second Order SystemsConsider a second order transfer function
G(s) =
c(s)
R(s)
=
b
0
s
2
+ a
1
s + a
0
.
The standard form of this transfer function is
G(s) = K ·
ω
2
n
s
2
+ 2ζω
n
s + ω
2
n
3
omega
n
= ω
n
is called the natural frequency (or undamped natural frequency). zeta = ζ is called the
damping ratio.
The characteristic equation is
s
2
+ 2ζω
n
s + ω
2
n
= 0
which has roots
s =
−2ζω
n
±
p
4ζ
2
ω
2
n
− 4ω
2
n
2
= −ζω
n
± ω
n
p
ζ
2
− 1
We consider 3 cases
0 < ζ < 1
ζ = 1
ζ > 1
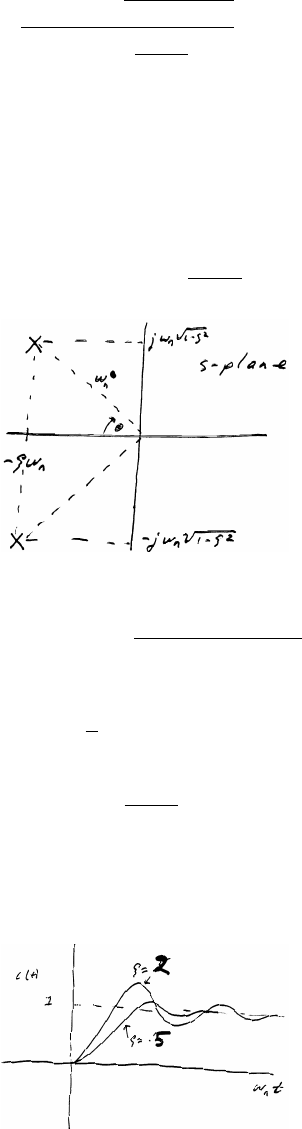
1) if 0 < ζ < 1 the system is called underdamped. The roots are complex conjugate
s = −ζω
n
± jω
n
p
1 − ζ
2
The unit step response is
c(s) = G(s)R(s) =
ω
2
n
s(s
2
+ 2ζω
n
s + ω
2
n
)
and it can be shown that
c(t) = 1 −
1
β
e
−ζω
n
t
sin(βω
n
t + θ)
where
β =
p
1 − ζ
2
θ = tan
−1
(β/ζ)
τ = 1/ζω
n
is the time constant of the exponentially decaying term. c(t) ≈ 1 after 4τ.
4
smaller ζ = more oscillation
= more overshoot
= longer time to reach steady state
ζ = 0 is undamped and the oscillations never decay to zero.
underdamped second-order step response
– decaying oscillation
– overshoot
– constant steady state
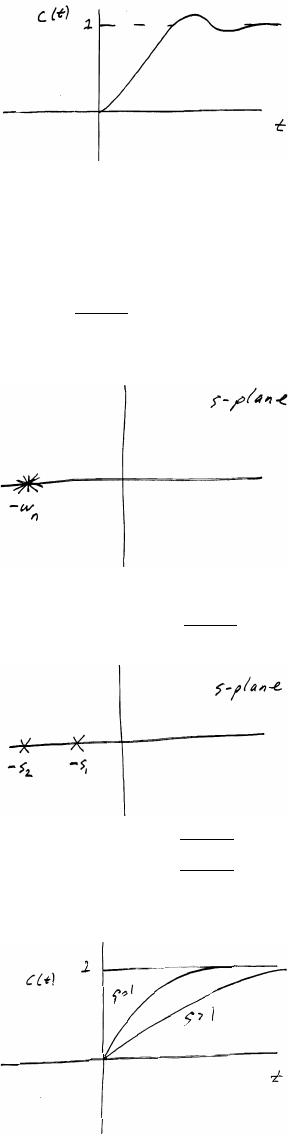
2) ζ = 1 is called critically damped. In this case
√
s
2
− 1 = 0 and the roots are real and repeated
s = −ω
n
3) ζ > 1 is called overdamped. The roots are real and distinct
s = −ζω
n
± ω
n
p
ζ
2
− 1
s
1
= ζω
n
− ω
n
p
ζ
2
− 1
s
2
= ζω
n
+ ω
n
p
ζ
2
− 1
In both the overdamped and critically damped cases the step response does not oscillate
5
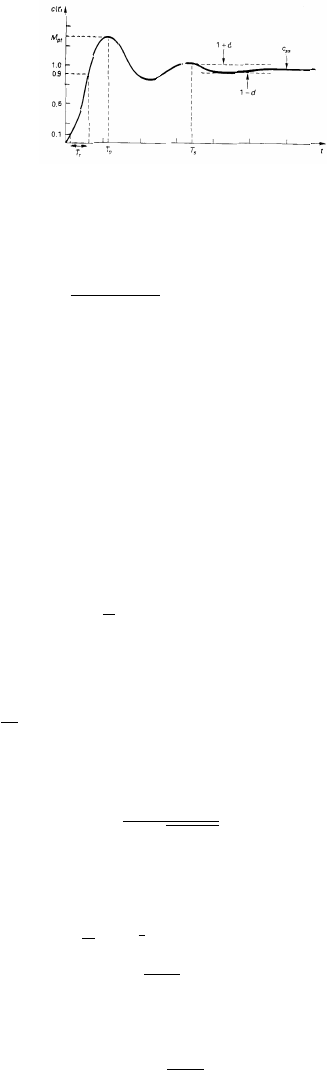
overshoot
rise time
settling time
steady state error
are all measures of performance that are used to design control systems.
percent overshoot
M
pt
− C
ss
C
ss
× 100
rise time T
r
is the time required for the step response to rise from 10% to 90% of its final value.
The Settling Time T
s
is the time required for the response to remain within a certain percent of its final
value, typically 2% to 5%. If we use 4 time constants as a measure then
τ
s
= 4τ = 4/ζω
n
These specifications can be used to design ξ, ω. Calculation of percent overshoot. Since the step response
(for ζ < 1) is given by
c(t) = 1 −
1
β
e
−ζω
n
t
sin(βω
τ
+ θ)
the maximum value M
pt
can be found from
d
dt
c(t) = 0 ⇒ sin(βω
n
t) = 0
Therefore the maximum occurs at time T
p
where βω
n
T
p
= π or
T
p
=
π
ω
n
p
1 − ζ
2
The peak value M
(
pt) is calculated from
C(T
p
) = 1 −
1
β
e
−ζω nt
sin(βω
n
t + σ)
t=T
1
= 1 = e
−ζπ/
√
1−ζ
2
.
Therefore the percent overshoot is
P.O. = e
−ζπ/
√
1−ζ
2
× 100
6
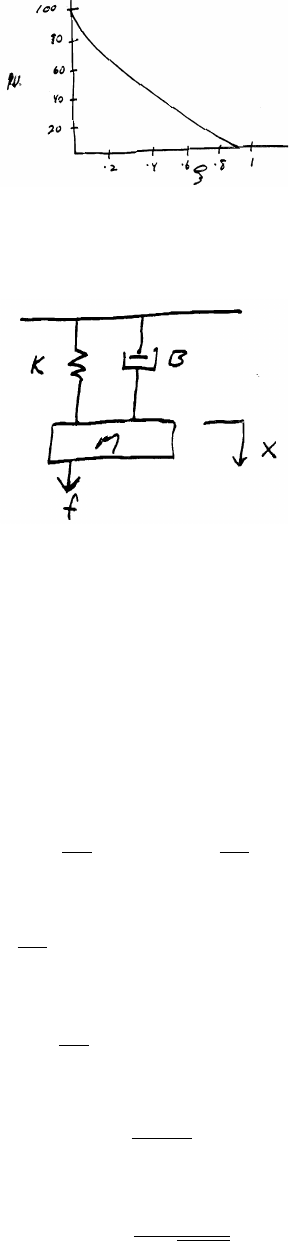
and depends only on ζ.
The graph can be used for design.
Example:Suppose you want M < 20%. Then you must design the system so that ζ > 0.5 (approx)
Example:
Suppose M, K are given. How should you choose B (shock absorber) so that the P.O. to a unit step is less
than ∼ 4%.
Example:
M = 100
K = 1000
100¨x + B ˙x + 1600x = f
or
¨x +
B
100
˙x + 16x =
1
100
f
The characteristic polynomial is
S
2
+
B
100
S + 16 = S
2
+ 2ζω
n
S + ω
2
n
.
Therefore we want P.O. ¡ 4%, therefore (from the graph) ζ > 0.7 with ζ = 0.7, ω
n
= 4 we see that
B
100
= 2 · 0.7 · 4
Therefore
B = 560
nt · sec
M
Note that T
p
is also an indication of rise time. From
T
p
=
π
ω
n
p
1 − ζ
2
7
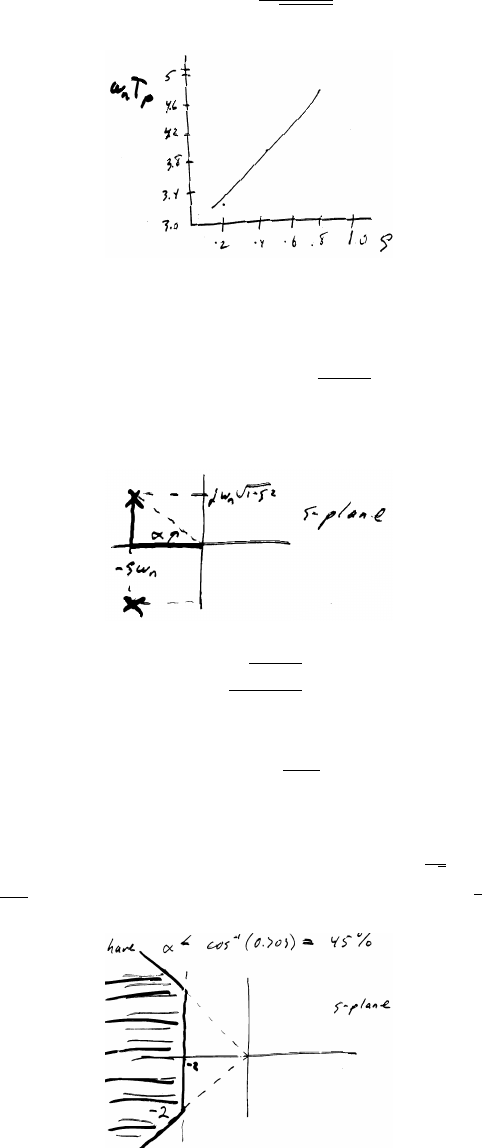
we have
ω
n
T
p
=
π
p
1 − ζ
2
.
Relation to Pole Location
Since the poles at
s = −ζω
n
± jω
n
p
1 − ζ
2
We see that the real part determines the settling time (recall T
s
= 4/ζω
n
)
α = tan
−1
p
1 − ζ
2
ζ
= cos
−1
ζ
Therefore
P.O. = e
−ζπ/
√
1−ζ
2
× 100
= e
−π/ tan
α
× 100
Example:Suppose we want P.O. < 4.32% (which corresponds to ζ =
1
√
2
≈ 0.707) and a settling time
T
s
< 2. Then form T
s
=
2
ζω
n
< 2 we get ζω
n
> 2 or −ζω
n
< −2 and we have α
6
cos
−1
(0.707) = 45%
8
