
II.6Stochastic Optimization
James C. Spall
6.1 Introduction ....................................................................................... 170
General Background
............................................................................. 170
F ormal Problem Statement
.................................................................... 171
Contrast of Stochastic and Deterministic Optimization
............................ 172
Some Principles of Stochastic Optimization
............................................ 174
6.2 Random Search ................................................................................. 176
Some General Properties of Direct Random Search
................................. 176
Two Algorithms for Random Search
....................................................... 177
6.3 Stochastic Approximation ................................................................ 180
Introduction
......................................................................................... 180
Finite-Difference SA .............................................................................. 181
Simultaneous Perturbation SA
............................................................... 183
6.4 Genetic Algorithms............................................................................ 186
Introduction
......................................................................................... 186
Chromosome Coding and the Basic GA Operations
................................. 188
The Core Genetic Algorithm .................................................................. 191
Some Implementation Aspects
.............................................................. 191
Some Comments on the Theory for GAs
................................................. 192
6.5 Concluding Remarks ......................................................................... 194
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

170 James C. Spall
Stochastic optimization algorithms have been growing rapidly in popularity over
the last decade or two, with a number of methods now becoming “industry stan-
dard” approaches for solving challenging optimization problems. This paper pro-
vides a synopsis of some of the critical issues associated with stochastic optimiza-
tion and a gives a summary of several popular algorithms. Much more complete
discussions are available in the indicated references.
To help constrain the scope of this article, we restrict our attention to methods
using only measurements of the criterion (loss function). Hence, we do not cover
the many stochastic methods using information such as gradients of the loss
function. Section 6.1 discusses some general issues in stochastic optimization.
Section 6.2 discusses random search methods, which are simple and surprisingly
powerful in many applications. Section 6.3 discusses stochastic approximation,
which is a foundational approach in stochastic optimization. Section 6.4 discusses
a popular method that is based on connections to natural evolution – genetic
algorithms. Finally, Sect. 6.5 offers some concluding remarks.
Introduction6.1
General Background6.1.1
Stochastic optimization plays a significant role in the analysis, design, and oper-
ation of modern systems. Methods for stochastic optimization provide a means
of coping with inherent system noise and coping with models or systems that are
highly nonlinear, high dimensional, or otherwise inappropriate for classical deter-
ministic methods of optimization. Stochastic optimization algorithms have broad
application to problems in statistics (e.g., design of experiments and response sur-
face modeling), science, engineering, and business. Algorithms that employ some
form of stochastic optimization have become widely available. For example, many
modern data mining packages include methods such as simulated annealing and
genetic algorithms as tools for extracting patterns in data.
Specificapplications includebusiness(making short- and long-term investment
decisions in order to increase profit), aerospace engineering (running computer
simulations to refine the design of a missile or aircraft), medicine (designing
laboratory experiments to extract the maximum information about the efficacy of
a new drug), and traffic engineering (setting the timing for the signals in a traffic
network). There are, of course, many other applications.
Let us introduce some concepts and notation. Suppose
Θ is the domain of
allowable values for a vector
θ.Thefundamentalproblemofinterestistofind
the value(s) of a vector
θ ∈ Θ that minimize a scalar-valued loss function L(θ).
Other common names for L are performance measure, objective function,measure-
of-effectiveness (MOE), fitness function (or negative fitness function), or criterion.
While this problem refers to minimizing a loss function, a maximization problem
(e.g., maximizing profit) can be trivially converted to a minimization problem by
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

Stochastic Optimization 171
changing the sign of the criterion. This paper focuses on the problem of mini-
mization. In some cases (i.e., differentiable L), the minimization problem can be
converted to a root-finding problem of finding θ such that g(θ) = ∂L(θ)|∂θ = 0.
Of course, this conversion must be done with care because such a root may not
correspond to a global minimum of L.
The three remaining subsections in this section define some basic quantities,
discuss some contrasts between (classical) deterministic optimizationandstochas-
tic optimization, and discuss some basic properties and fundamental limits. This
section provides the foundation for interpreting the algorithm presentations in
Sects. 6.2 to 6.4. There are many other references that give general reviews of vari-
ous aspects of stochastic optimization. Among these are Arsham (1998), Fouskakis
and Draper (2002), Fu (2002), Gosavi (2003), Michalewicz and Fogel (2000), and
Spall (2003).
Formal Problem Statement 6.1.2
The problem of minimizing a loss function L
= L(θ) can be formally represented
as finding the set:
Θ
∗
≡ arg min
θ∈Θ
L(θ) = {θ
∗
∈ Θ : L(θ
∗
) ≤ L(θ) for all θ ∈ Θ} , (6.1)
where
θ is the p-dimensional vector of parameters that are being adjusted and
Θ ⊆ R
p
.The“arg min
θ∈Θ
” statement in (6.1) should be read as: Θ
∗
is the set of
values
θ = θ
∗
(θ the “argument” in “arg min”) that minimize L(θ) subject to θ
∗
satisfying the constraints represented in the set Θ. The elements θ
∗
∈ Θ
∗
⊆ Θ
are equivalent solutions in the sense that they yield identical values of the loss
function. The solution set Θ
∗
in (6.1) may be a unique point, a countable (finite or
infinite) collection of points, or a set containing an uncountable number of points.
For ease of exposition, this paper generally focuses on continuous optimization
problems,althoughsomeofthemethodsmayalsobeusedindiscreteproblems.In
the continuous case, it is often assumed that L is a “smooth” (perhaps several times
differentiable) function of
θ. Continuous problems arise frequently in applications
such as model fitting (parameter estimation), adaptive control, neural network
training, signal processing, and experimental design. Discrete optimization (or
combinatorial optimization) is a large subject unto itself (resource allocation, net-
work routing, policy planning, etc.).
A major issue in optimization is distinguishing between global and local optima.
All other factors being equal, one would always want a globally optimal solution to
the optimization problem (i.e., at least one
θ
∗
in the set of values Θ
∗
). In practice,
however, it may not be feasible to find a global solution and one must be satisfied
with obtaining a local solution. For example, L may be shaped such that there is
a clearly defined minimum point over a broad region of the domain
Θ, while there
is a very narrow spike at a distant point. If the trough of this spike is lower than any
point in the broad region, the local optimal solution is better than any nearby
θ,
butitisnotbethebestpossibleθ.
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

172 James C. Spall
It is usually only possible to ensure that an algorithm will approach a local
minimumwitha finiteamountofresourcesbeingputintothe optimizationprocess.
Thatis,itiseasytoconstructfunctionsthatwill“fool”anyknownalgorithm,
unless the algorithm is given explicit prior information about the location of the
global solution – certainly not a case of practical interest! However, since the
local minimum may still yield a significantly improved solution (relative to no
formal optimization process at all), the local minimum may be a fully acceptable
solution for the resources available (human time, money, computer time, etc.) to
be spent on the optimization. However, we discuss several algorithms (random
search, stochastic approximation, and genetic algorithms) that are sometimes able
to find global solutions from among multiple local solutions.
Contrast of Stochastic and Deterministic Optimization6.1.3
As a paper on stochastic optimization,thealgorithms consideredhereapplywhere:
I. There is random noise in the measurements of L(
θ)
–and
|or –
II. There is a random (Monte Carlo) choice made in the search direction as the
algorithm iterates toward a solution.
In contrast, classical deterministic optimization assumes that perfect information
is available about the loss function (and derivatives, if relevant) and that this
information is used to determine the search direction in a deterministic manner
at every step of the algorithm. In many practical problems, such information is not
available. We discuss properties I and II below.
Let
ˆ
θ
k
be the generic notation for the estimate for θ at the kth iteration of
whatever algorithm is being considered, k
= 0, 1, 2, … . Throughout this paper, the
specific mathematical form of
ˆ
θ
k
will change as the algorithm being considered
changes. The following notation will be used to represent noisy measurements of L
at a specific
θ:
y(
θ) ≡ L(θ)+ε(θ), (6.2)
where ε represents the noise term. Note that the noise terms showdependenceonθ.
This dependence is relevant for many applications. It indicates that the common
statistical assumption of independent, identically distributed (i.i.d.) noise does not
necessarily apply since
θ will be changing as the search process proceeds.
Relative to property I, noise fundamentally alters the search and optimiza-
tion process because the algorithm is getting potentially misleading information
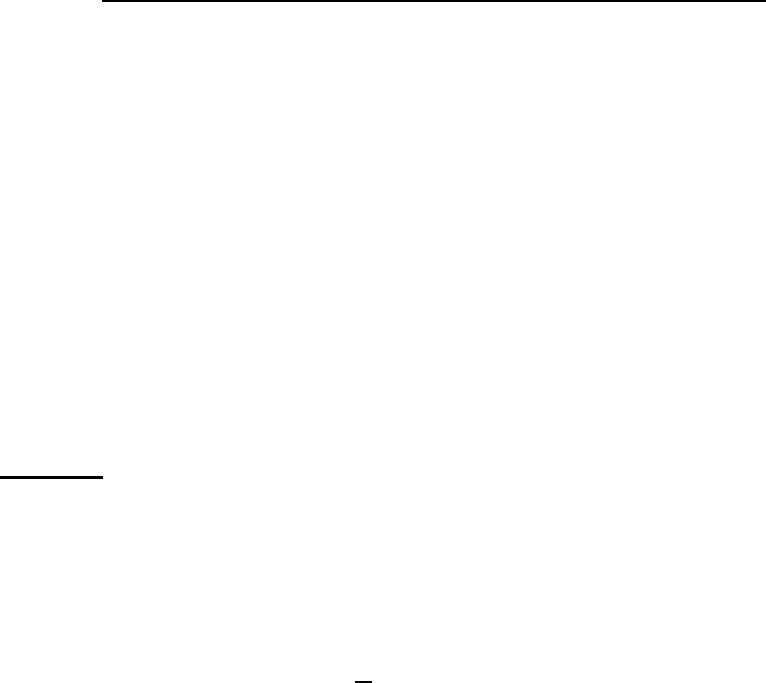
throughout the search process. For example, as described in Example 1.4 of Spall
(2003), consider the following loss function with a scalar
θ: L(θ) = e
−0.1θ
sin(2θ).
If the domain for optimization is
Θ = [0, 7], the (unique) minimum occurs at
θ
∗
= 3π|4 ≈ 2.36, as shown in Fig. 6.1. Suppose that the analyst carrying out the
optimization is not able to calculate L(
θ), obtaining instead only noisy measure-
ments y(θ) = L(θ)+ε,wherethenoisesε are i.i.d. with distribution N(0, 0.5
2
)
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

Stochastic Optimization 173
(a normal distribution with mean zero and variance 0.5
2
). The analyst uses the
y(
θ) measurements in conjunction with an algorithm to attempt to find θ
∗
.
Considerthe experimentdepicted in Fig. 6.1 (with datagenerated via MATLAB).
Based onthe simplemethod ofcollectingonemeasurement ateach incrementof0.1
over the interval defined by
Θ (including the endpoints 0 and 7), the analyst would
falsely conclude that the minimum is at
θ = 5.9. As shown, this false minimum is
far from the actual
θ
∗
.
Figure 6.1. Simple loss function L(θ) with indicated minimum θ
∗
.Notehownoisecausesthe
algorithm to be deceived into sensing that the minimum is at the indicated false minimum
(Reprinted from Introduction to Stochastic Search and Optimization with permission of John
Wiley & Sons, Inc.)
Noiseinthe loss functionmeasurementsarises inalmostanycasewherephysical
system measurements or computer simulations are used to approximate a steady-
state criterion. Some specific areas of relevance include real-time estimation and
control problems where data are collected “on the fly” as a system is operating
and problems where large-scale simulations are run as estimates of actual system
behavior.
Let us summarize two distinct problems involving noise in the loss function
measurements: target tracking and simulation-based optimization. In the tracking
problem there is a mean-squared error (MSE) criterion of the form
L(
θ) = E
actual output − desired output
2
.
The stochastic optimization algorithm uses the actual (observed) squared error
y(
θ) =
·
2
, which is equivalent to an observation of L embedded in noise. In
the simulation problem, let L(θ) be the loss function representing some type of
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
174 James C. Spall
“average” performance for the system. A single run of a Monte Carlo simulation at
a specific value of θ provides a noisy measurement: y(θ) = L(θ)+ noise at θ.(Note
that it is rarely desirable to spend computational resources in averaging many
simulation runs at a given value of
θ; in optimization, it is typically necessary to
consider many values of
θ.) The above problems are described in more detail in
Examples 1.5 and 1.6 in Spall (2003).
Relative to the other defining property of stochastic optimization, property II
(i.e., randomness in the search direction), it is sometimes beneficial to deliberately
introduce randomness into the search process as a means of speeding convergence
and making the algorithm less sensitive to modeling errors. This injected (Monte
Carlo) randomness is usually created via computer-based pseudorandom number
generators. One of the roles of injected randomness in stochastic optimization is
to allow for “surprise” movements to unexplored areas of the search space that
may contain an unexpectedly good
θ value. This is especially relevant in seeking
out a global optimum among multiple local solutions. Some algorithms that use
injected randomness are random search (Sect. 6.2), simultaneous perturbation
stochastic approximation (Sect. 6.3), and genetic algorithms (Sect. 6.4).
Some Principles of Stochastic Optimization6.1.4
The discussion above is intended to motivate some of the issues and challenges
in stochastic optimization. Let us now summarize some important issues for the
implementation and interpretation of results in stochastic optimization.
The first issue we mention is the fundamental limits in optimization with only
noisy information about the L function. Foremost, perhaps, is that the statistical
error of the information fed into the algorithm – and the resulting error of the
output of the algorithm – can only be reduced by incurring a significant cost in
number of function evaluations. For the simple case of independent noise, the
error decreases at the rate 1
|
√
N,whereN represents the number of L measure-
ments fed into the algorithm. This is a classical result in statistics, indicating
that a 25-fold increase in function evaluations reduces the error by a factor of
five.
A further limit for multivariate (p>1) optimization is that the volume of the
search region generally grows rapidly with dimension. This implies that one must
usuallyexploitproblemstructuretohaveahopeofgettingareasonablesolution
in a high-dimensional problem.
All practical problems involve at least some restrictions on
θ,althoughinsome
applications it may be possible to effectively ignore the constraints. Constraints
can be encountered in many different ways, as motivated by the specific appli-
cation. Note that the constraint set
Θ does not necessarily correspond to the set
of allowable values for
θ in the search since some problems allow for the “tri-
al” values of the search to be outside the set of allowable final estimates. Con-
straints are usually handled in practice on an ad hoc basis, especially tuned
to the problem at hand. There are few general, practical methods that apply
broadly in stochastic optimization. Michalewicz and Fogel (2000, Chap. 9), for
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

Stochastic Optimization 175
example, discuss some of the practical methods by which constraints are han-
dled in evolutionary computation. Similar methods apply in other stochastic
algorithms.
In general search and optimization, it is very difficult (perhaps impossible) to
develop automated methods for indicating when the algorithm is close enough
to the solution that it can be stopped. Without prior knowledge, there is al-
ways the possibility that
θ
∗
could lie in some unexplored region of the search
space. This applies even when the functions involved are relatively benign; see
Solis and Wets (1981) for mention of this in the context of twice-differentiable
convex L. Difficulties are compounded when the function measurements include
noise.
It is quitenormal forthe environment tochangeovertime. Hence,the solution to
a problem now may not be the best (or even a good) solution to the corresponding
problem in the future. In some search and optimization problems, the algorithm
will be explicitly designed to adapt to a changing environment and automatically
provide a new estimate at the optimal value (e.g., a control system). In other cases,
oneneedstorestarttheprocessandfindanewsolution.Ineithersense,the
problem solving may never stop!
In reading or contributing to the literature on stochastic optimization, it is
important to recognize the limits of numerical comparisons by Monte Carlo. Monte
Carlo studies can beasoundscientific method ofgaining insight and can be auseful
supplementtotheory,muchofwhichisbasedonasymptotic(infinitesample)
analysis. In fact, it is especially popular in certain branches of optimization to
create “test suites” of problems, where various algorithms compete against each
other. A danger arises, however, in making broad claims about the performance
of individual algorithms based on the results of numerical studies. Performance
can vary tremendously under even small changes in the form of the functions
involved or the coefficient settings within the algorithms themselves. One must be
careful about drawing conclusions beyond those directly supported by the specific
numerical studies performed.Forpurposes ofdrawing objective conclusionsabout
the relative performance of algorithms, it is preferable to use both theory and
numerical studies.
Some real systems have one (unique) globally “best” operating point (
θ
∗
)inthe
domain
Θ while others have multiple global solutions (in either case, of course,
there could be many locally optimal solutions). To avoid excessively cumbersome
discussion of algorithms and supporting implementation issues and theory, we
will often refer to “the” solution
θ
∗
(versus “a” solution θ
∗
). In practice, an analyst
may be quite satisfied to reach a solution at or close to any one
θ
∗
∈ Θ
∗
.
The so-called no free lunch (NFL) theorems provide a formal basis for the
intuitively appealing idea that there is a fundamental tradeoff between algorithm
efficiency and algorithm robustness (reliability and stability in a broad range of
problems). In essence, algorithms that are very efficient on one type of problem are
not automatically efficient on problems of a different type. Hence, there can never
be a universally best search algorithm just as there is rarely (never?) a universally
best solution to any general problem of society. Wolpert and Macready (1997)
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
176 James C. Spall
provided a general formal structure for the NFL theorems, although the general
ideas had been around for a long time prior to their paper (Wolpert and Macready
were the ones to coin the expression “no free lunch” in this search and optimization
context). The NFL theorems are established for discrete optimization with a finite
(but arbitrarily large) number of options. However, their applicability includes
most practical continuous problems because virtually all optimization is carried
out on 32-or64-bit digital computers. The theorems apply to the cases of both
noise-free and noisy loss measurements. NFL states, in essence, that an algorithm
thatiseffectiveononeclassofproblemsisguaranteed to be ineffective on another
class. Spall (2003, Sects. 1.2.2 and 10.6) provides more-detailed discussion on the
basis and implications of NFL.
We are now in a position to discuss several popular stochastic optimization
methods. The summaries here are just that – summaries. Much more complete
discussions are available in the indicated references or in Spall (2003). We let
ˆ
θ
k
represent the estimate for θ at the kth iteration ofanalgorithm under consideration.
Section 6.2 discusses random search methods, which are simple and surprisingly
powerful in many applications. Section 6.3 discusses stochastic approximation and
Sect. 6.4 discusses the popular genetic algorithms. Because of the relative brevity
of this review, there are many methods of stochastic optimization not covered
here, including simulated annealing, stochastic programming, evolutionary com-
putation other than genetic algorithms, temporal difference methods, and so on.
Readers with an interest in one of those may consult the references listed at the
end of Sect. 6.1.1.
Random Search6.2
This section describes some simple methods based on the notion of randomly
searching over the domain of interest. Section 6.2.1 gives a short discussion of
general issues in direct random search methods. The algorithms discussed in
Sect. 6.2.2 represent two versions of random search.
Some General Properties of Direct Random Search6.2.1
Consider the problem of trying to find the optimal θ ∈ Θ based on noise-free mea-
surements of L
= L(θ). Random search methods are perhaps the simplest methods
of stochastic optimization in such a setting and can be quite effective in many
problems. Their relative simplicity is an appealing feature to both practitioners
and theoreticians. These direct random search methods have a number of advan-
tages relative to most other search methods. The advantages include relative ease
of coding in software, the need to only obtain L measurements (versus gradients or
other ancillary information), reasonable computational efficiency (especially for
those direct search algorithms that make use of some local information in their
search), broad applicability to non-trivial loss functions and
|or to θ that may be
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

Stochastic Optimization 177
continuous, discrete, or some hybrid form, and a strong theoretical foundation.
Some of these attributes were mentioned in the forward-looking paper of Karnopp
(1963). A good recent survey of random search and related methods is Kolda et al.
(2003).
Two Algorithms for Random Search 6.2.2
This section describes two direct random search techniques. These two algorithms
represent only a tiny fraction of available methods. Solis and Wets (1981) and
Zhigljavsky (1991) are among many references discussing these and other random
search methods. The two algorithms here are intended to convey the essential
flavor of most available direct random search algorithms. With the exception of
some discussion at the end of the subsection, the methods here assume perfect
(noise-free) values of L.
The first method we discuss is “blind random search.” This is the simplest
random search method, where the current sampling for
θ does not take into
account the previous samples. That is, this blind search approach does not adapt
the current sampling strategy to information that has been garnered in the search
process. The approach can be implemented in batch (non-recursive) form simply
by laying down a number of points in
Θ and taking the value of θ yielding the
lowest L value as our estimate of the optimum. The approach can be conveniently
implemented in recursive form as we illustrate below.
Thesimplestsettingforconductingtherandomsamplingofnew(candidate)val-
ues of
θ is when Θ is a hypercube and we are using uniformly generated values of θ.
The uniform distribution is continuous or discrete for the elements of θ depending
onthe definitions forthese elements.In fact, the blind search form of the algorithm
is unique among all general stochastic optimization algorithms in that it is the
only one without any adjustable algorithm coefficients that need to be “tuned” to
the problem at hand. (Of course, a de facto tuning decision has been made by
choosing the uniform distribution for sampling.)
For a domain
Θ that is not a hypercube or for other sampling distributions,
one may use transformations, rejection methods, or Markov chain Monte Carlo
to generate the sample
θ values (see, e.g., Gentle, 2003). For example, if Θ is an
irregular shape, one can generate a sample on a hypercube superset containing
Θ
and then reject the sample point if it lies outside of Θ.
The steps for a recursive implementation of blind random search are given
below. This method applies when
θ has continuous, discrete, or hybrid elements.
Blind Random Search
Step 0 (Initialization) Choose an initial value of θ,say
ˆ
θ
0
∈ Θ,eitherrandomlyor
deterministically. (If random, usually a uniform distribution on
Θ is used.)
Calculate L(
ˆ
θ
0
).Setk = 0.
Step 1 Generate a new independent value
θ
new
(k +1)∈ Θ, according to the chosen
probability distribution. If L(
θ
new
(k +1)) <L(
ˆ
θ
k
),set
ˆ
θ
k+1
= θ
new
(k +1).
Else, take
ˆ
θ
k+1
=
ˆ
θ
k
.
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

178 James C. Spall
Step 2 Stop if the maximum number of L evaluations has been reachedor the user is
otherwise satisfied with the current estimate for θ via appropriate stopping
criteria;else,returntoStep1withthenewk set to the former k +1.
The above algorithm converges almost surely (a.s.) to
θ
∗
under very general
conditions (see, e.g., Spall, 2003, pp. 40–41). Of course, convergence alone is an
incomplete indication of the performance of the algorithm. It is also of interest
to examine the rate of convergence. The rate is intended to tell the analyst how
close
ˆ
θ
k
islikelytobetoθ
∗
for a given cost of search. While blind random search
is a reasonable algorithm when
θ is low dimensional, it can be shown that the
method is generally a very slowalgorithm for even moderatelydimensionedθ (see,
e.g., Spall, 2003, 42–43). This is a direct consequence of the exponential increase
in the size of the search space as p increases. As an illustration, Spall (2003,
Example 2.2) considers a case where
Θ = [0, 1]
p
(the p-dimensional hypercube
with minimum and maximum values of 0 and 1 for each component of θ)and
where one wishes to guarantee with probability 0.90 that each element of
θ is
within 0.04 units of the optimal value. As p increases from one to ten, there is
an approximate 10
10
-fold increase in the number of loss function evaluations
required.
Blind search is the simplest random search in that the sampling generating
the new
θ value does not take account of where the previous estimates of θ have
been. The random search algorithm below is slightly more sophisticated in that the
random sampling is a function of the position of the current best estimate for
θ.
In this way, the search is more localized in the neighborhood of that estimate,
allowing for a better exploitation of information that has previously been obtained
about the shape of the loss function.
The localized algorithm is presented below. This algorithm was described in
Matyas (1965). Note that the use of the term “localized” here pertains to the
sampling strategy and does not imply that the algorithm is only useful for local
(versusglobal)optimizationinthesensedescribed inSect.6.1.Infact,the algorithm
has global convergence properties as described below. As with blind search, the
algorithm may be used for continuous or discrete problems.
Localized Random Search
Step 0 (Initialization) Pick an initial guess
ˆ
θ
0
∈ Θ,eitherrandomlyorwithprior
information. Set k
= 0.
Step 1 Generate an independent random vector d
k
∈ R
p
and add it to the current
θ value,
ˆ
θ
k
. Check if
ˆ
θ
k
+ d
k
∈ Θ.If
ˆ
θ
k
+ d
k
|∈ Θ, generate a new d
k
and
repeat or, alternatively, move
ˆ
θ
k
+ d
k
to the nearest valid point within Θ.Let
θ
new
(k+1)equal
ˆ
θ
k
+d
k
∈ Θ or the aforementioned nearest valid point in Θ.
Step 2 If L(
θ
new
(k +1))<L(
ˆ
θ
k
),set
ˆ
θ
k+1
= θ
new
(k +1);else,set
ˆ
θ
k+1
=
ˆ
θ
k
.
Step 3 Stop if the maximum number of L evaluations has been reachedor the user is
otherwise satisfied with the current estimate for
θ via appropriate stopping
criteria;else,returntoStep1withthenewk set to the former k +1.
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

Stochastic Optimization 179
For continuous problems, Matyas (1965) and others have used the (multivari-
ate) normal distribution for generating d
k
. However, the user is free to set the
distribution of the deviation vector d
k
. The distribution should have mean zero
and each component should have a variation (e.g., standard deviation) consistent
with the magnitudes of the corresponding
θ elements. This allows the algorithm
to assign roughly equal weight to each of the components of
θ as it moves through
the search space. Although not formally allowed in the convergence theory, it is
often advantageous in practice if the variability in d
k
is reduced as k increases. This
allows one to focus the search more tightly as evidence is accrued on the location
of the solution (as expressed by the location of our current estimate
ˆ
θ
k
).
The convergence theory for the localized algorithms tends to be more restrictive
than the theory for blind search. Solis and Wets (1981) provide a theorem for
global convergence of localized algorithms, but the theorem conditions may not be
verifiable in practice. An earlier theorem from Matyas (1965) (with proof corrected
in Baba et al., 1977) provides for global convergence of the localized search above
if L is a continuous function. The convergence is in the “in probability” sense. The
theorem allows for more than one global minimum to exist in
Θ. Therefore, in
general, the result provides no guarantee of
ˆ
θ
k
ever settling near any one value θ
∗
.
We present the theorem statement below.
Convergence Theorem for Localized Search. Let
Θ
∗
represent the set of global
minima for L (see Sect. 6.1). Suppose that L is continuous on a bounded domain
Θ
and that if
ˆ
θ
k
+ d
k
|∈ Θ at a given iteration, a new d
k
is randomly generated. For
any
η > 0,letR
η
=
0
θ
∗
∈Θ
∗
θ : |L(θ)−L(θ
∗
)| < η
.Then,ford
k
having an i.i.d.
N(0, I
p
) distribution, lim
k→∞
P(
ˆ
θ
k
∈ R
η
) = 1.
The above algorithm might be considered the most na¨ıve of the localized random
search algorithms. More sophisticated approaches are also easy to implement. For
instance, if a search in one direction increases L, then it is likely to be beneficial
to move in the opposite direction. Further, successive iterations in a direction
that tend to consistently reduce L should encourage further iterations in the same
direction. Many algorithms exploiting these simple properties exist (e.g., Solis and
Wets, 1981, and Zhigljavsky, 1991).
In spite of its simplicity, the localized search algorithm is surprisingly effective
in a wide range of problems. Several demonstrations are givenin Sects. 2.2.3 and 2.3
in Spall (2003).
The random search algorithms above are usually based on perfect (noise-free)
measurements of the loss function. This is generally considered a critical part
of such algorithms (Pflug, 1996, p. 25). In contrast to the noise-free case, random
search methods with noisy loss evaluations of the form y(
θ) = L(θ)+ε(θ) generally
do not formally converge. However, there are means by which the random search
techniques can be modified to accommodate noisy measurements, at least on
a heuristic basis.
Some of the limited formal convergence theory for random search as applied
to the noisy measurement case includes Yakowitz and Fisher (1973, Sect. 4) and
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
180 James C. Spall
Zhigljavsky (1991, Chap. 3). Spall (2003, Sect. 2.3) discusses some practical methods
for coping with noise, including simple averaging of the noisy loss function eval-
uations y(θ) at each value of θ generated in the search process and a modification
of the algorithm’s key decision criterion (step 1 of blind random search and step 2
of localized random search) to build in some robustness to the noise. However,
the averaging method can be costly since the error decreases only at the rate of
1
|
√
N when averaging N function evaluations with independent noise. Likewise,
the altered threshold may be costly by rejecting too many changes in
θ due to the
conservative nature of the modified criterion. The presence of noise in the loss
evaluations makes the optimization problem so much more challenging that there
is little choice but to accept these penalties if one wants to use a simple random
search. We will see in the next section that stochastic approximation tends to be
more adept at coping with noise at the price of a more restrictive problem setting
than the noise-free convergence theorem above.
Stochastic Approximation6.3
Introduction6.3.1
Stochastic approximation(SA) is a cornerstone ofstochastic optimization.Robbins
and Monro (1951) introduced SA as a general root-finding method when only noisy
measurements of the underlying function are available. Let us now discuss some
aspects of SA as applied to the more specific problem of root-finding in the context
of optimization. With a differentiable loss function L(
θ), recall the familiar set of
p equations and p unknowns for use in finding a minimum θ
∗
:
g(
θ) =
∂L
∂θ
= 0 . (6.3)
(Of course, side conditions are required to guarantee that a root of (6.3) is a mini-
mum, not a maximum or saddlepoint.) Note that (6.3) is nominally only directed
at local optimization problems, although some extensions to global optimization
are possible, as briefly discussed in Sect. 6.3.3. There are a number of approaches
for solving the problem represented by (6.3) when direct (usually noisy) measure-
ments of the gradient g are available. These typically go by the name of stochastic
gradient methods (e.g., Spall, 2003, Chap. 5). In contrast to the stochastic gradient
approach – but consistent with the emphasis in the random search and genetic
algorithms (Sects. 6.2 and 6.4 here) – let us focus on SA when only measurements
of L are available. However, unlike the emphasis in random search and genetic
algorithms, we consider noisy measurements of L.
To motivate the general SA approach, first recall the familiar form for the
unconstrained deterministic steepest descent algorithm for solving (6.3):
ˆ
θ
k+1
=
ˆ
θ
k
− a
k
g(
ˆ
θ
k
),
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
Stochastic Optimization 181
where the gain (or step size) satisfies a
k
> 0 (see, e.g., Bazaraa et al., 1993,
pp. 300–308 or any other book on mathematical programming; Spall, 2003,
Sect. 1.4). This algorithm requires exact knowledge of g. Steepest descent will
converge to
θ
∗
under certain fairly general conditions. (A notable variation of
steepest descent is the Newton–Raphson algorithm [sometimes called Newton’s
method; e.g., Bazaraa et al., 1993, pp. 308–312], which has the form
ˆ
θ
k+1
=
ˆ
θ
k
−
a
k
H(
ˆ
θ
k
)
−1
g(
ˆ
θ
k
),whereH(·) is the Hessian (second derivative) matrix of L.Under
more restrictive conditions, the Newton–Raphson algorithm has a much faster
rate of convergence to
θ
∗
than steepest descent. However, with its requirement for
a Hessian matrix, it is generally more challenging to implement. An SA version of
Newton–Raphson is discussed briefly at the end of Sect. 6.3.3.)
Unlikewith steepestdescent,it isassumedhere thatwehaveno directknowledge
of g. The recursive procedure of interest is in the general SA form
ˆ
θ
k+1
=
ˆ
θ
k
− a
k
ˆg
k
(
ˆ
θ
k
), (6.4)
where ˆg
k
(
ˆ
θ
k
) is the estimate of g at the iterate
ˆ
θ
k
based on measurements of the
loss function. Hence, (6.4) is analogous to the steepest descent algorithm, with
the gradient estimate ˆg
k
(θ) replacing the direct gradient g at θ =
ˆ
θ
k
.Thegain
a
k
> 0 here also acts in a way similar to its role in the steepest descent form. Under
appropriate conditions, the iteration in (6.4) converges to
θ
∗
in some stochastic
sense (usually almost surely, a.s.). (There are constrained forms of SA, but we do
not discuss those here; see, e.g., Spall, 2003, Chaps. 4–7).
Sections6.3.2 and6.3.3discusstwo SA methods forcarryingouttheoptimization
task using noisy measurements of the loss function. Section 6.3.2 discusses the
traditional finite-difference SA method and Sect. 6.3.3 discusses the more recent
simultaneous perturbation method.
Finite-Difference SA 6.3.2
The essential part of (6.4) is the gradient approximation ˆg
k
(
ˆ
θ
k
). The tradition-
al means of forming the approximation is the finite-difference method. Expres-
sion (6.4) with this approximation represents the finite-difference SA (FDSA)
algorithm. One-sided gradient approximations involve measurements y(
ˆ
θ
k
) and
y(
ˆ
θ
k
+ perturbation), while two-sided approximations involve measurements of
the form y(
ˆ
θ
k
±perturbation). The two-sided FD approximation for use with (6.4)
is
ˆg
k
(
ˆ
θ
k
) =
y(
ˆ
θ
k
+ c
k
ξ
1
)−y(
ˆ
θ
k
− c
k
ξ
1
)
2c
k
.
.
.
y(
ˆ
θ
k
+ c
k
ξ
p
)−y(
ˆ
θ
k
− c
k
ξ
p
)
2c
k
, (6.5)
where
ξ
i
denotes a vector with a 1 in the ith place and 0’s elsewhere and c
k
> 0
defines the difference magnitude. The pair {a
k
, c
k
}are the gains (or gain sequences)
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

182 James C. Spall
for the FDSA algorithm. The two-sided form in (6.5) is the obvious multivariate
extension of the scalar two-sided form in Kiefer and Wolfowitz (1952). The initial
multivariate method in Blum (1954) used a one-sided approximation.
It is of fundamental importance to determine conditions such that
ˆ
θ
k
as shown
in (6.4) and (6.5) converges to
θ
∗
in some appropriate stochastic sense. The conver-
gence theory for the FDSA algorithm is similar to “standard” convergence theory
for the root-findingSA algorithm of Robbins and Monro (1951). Additional difficul-
ties, however, arise due to a bias in ˆg
k
(
ˆ
θ
k
) as an estimator of g(
ˆ
θ
k
). That is, standard
conditions for convergence of SA require unbiased estimates of g(·) at all k.Onthe
other hand, ˆg
k
(
ˆ
θ
k
), as shown in (6.5), is a biased estimator, with the bias having
a magnitude of order c
2
k
. We will not present the details of the convergence theory
here, as it is available in many other references (e.g., Fabian, 1971; Kushner and Yin,
1997, Sects. 5.3, 8.3, and 10.3; Ruppert, 1991; Spall, 2003, Chap. 6). However, let us
note that the standard conditions on the gain sequences are: a
k
> 0, c
k
> 0, a
k
→ 0,
c
k
→ 0,
∞
k
=0
a
k
= ∞,and
∞
k
=0
a
2
k
|c
2
k
< ∞. The choice of these gain sequences is
critical to the performance of the method. Common forms for the sequences are:
a
k
=
a
(k +1+A)
α
and c
k
=
c
(k +1)
γ
,
where the coefficients a, c,
α,andγ are strictly positive and A ≥ 0. The user must
choose these coefficients, a process usually based on a combination of the the-
oretical restrictions above, trial-and-error numerical experimentation, and basic
problem knowledge. In some cases, it is possible to partially automate the selection
of the gains (see, e.g., Spall, 2003, Sect. 6.6).
Let us summarize a numerical example based on the following p
= 10 loss
function:
L(
θ) = θ
T
B
T
Bθ +0.1
10
i=1
(Bθ)
3
i
+ 0.01
10
i=1
(Bθ)
4
i
,
where (·)
i
represents the ith component of the argument vector Bθ,andB is such
that 10 B is an upper triangular matrix of 1’s. The minimum occurs at θ
∗
= 0 with
L(
θ
∗
) = 0; all runs are initialized at
ˆ
θ
0
= [1, 1, …,1]
T
(so L(
ˆ
θ
0
) = 4.178). Suppose
thatthe measurement noise ε is independent,identically distributed (i.i.d.) N(0, 1).
All iterates
ˆ
θ
k
are constrained to be in Θ = [−5, 5]
10
.IfaniteratefallsoutsideofΘ,
each individual component of the candidate
θ that violates the interval [−5, 5] is
mapped to it nearest endpoint ±5. The subsequent gradient estimate is formed
at the modified (valid)
θ value. (The perturbed values
ˆ
θ
k
± c
k
ξ
i
are allowed to go
outside of
Θ.)
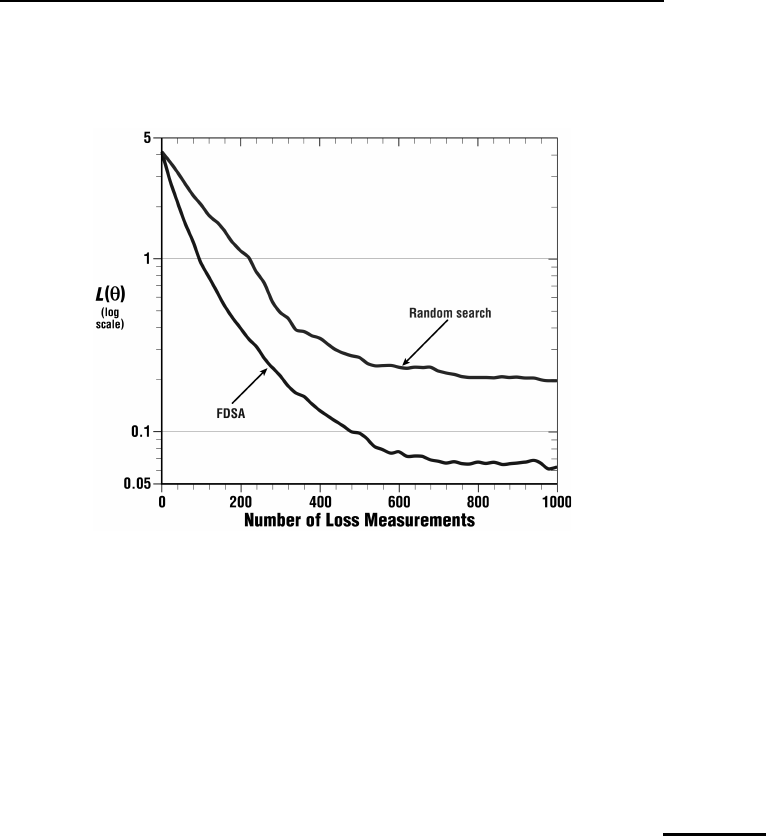
Using n
= 1000 loss measurements per run, we compareFDSA with the localized
random search method of Sect. 6.2. Based on principles for gain selection in Spall
(2003, Sect. 6.6) together with some limited trial-and-error experimentation, we
chose a
= 0.5, c = 1, A = 5, α = 0.602,andγ = 0.101 for FDSA and an average
of 20 loss measurements per iteration with normally distributed perturbations
having distribution N(0,0.5
2
I
10
) for the random search method.
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
Stochastic Optimization 183
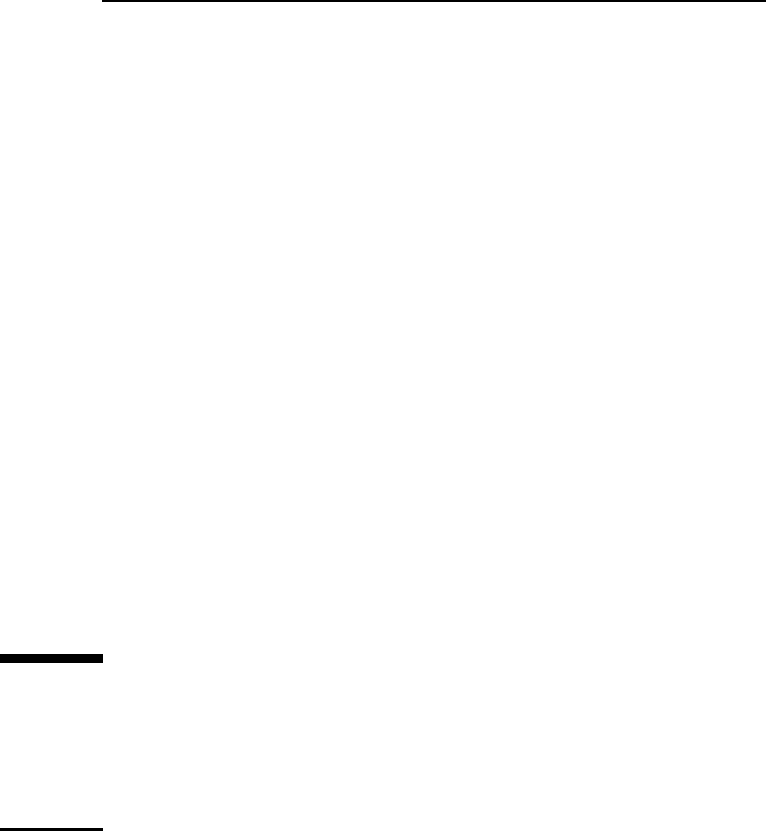
Figure 6.2 summarizes the results. Each curve represents the sample mean of
50 independent replications. An individual replication of one of the two algo-
rithms has much more variation than the corresponding smoothed curve in the
figure.
Figure 6.2. Comparison of FDSA and localized random search. Each curve represents sample mean of
50 independent replications
Figure 6.2 shows that both algorithms produce an overall reduction in the
(true) loss function as the number of measurements approach 1000.Thecurves
illustrate that FDSA outperforms random search in this case. To make the com-
parison fair, attempts were made to tune each algorithm to provide approxi-
mately the best performance possible. Of course, one must be careful about
using this example to infer that such a result will hold in other problems as
well.
Simultaneous Perturbation SA 6.3.3
The FDSA algorithm of Sect. 6.3.2 is a standard SA method for carrying out opti-
mizationwith noisy measurement ofthe loss function. However,as the dimensionp
grows large, the number of loss measurements required may become prohibitive.
That is, each two-sided gradient approximation requires 2p loss measurements.
More recently, the simultaneous perturbation SA (SPSA) method was introduced,
requiring only two measurements per iteration to form a gradient approximation
independent of the dimension p. This provides the potential for a large savings in
the overall cost of optimization.
Beginning with the generic SA form in (6.4), we now present the SP form of the
gradient approximation. In this form, all elements of
ˆ
θ
k
are randomly perturbed
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
184 James C. Spall
together to obtain two loss measurements y(·). For the two-sided SP gradient
approximation, this leads to
ˆg
k
(
ˆ
θ
k
) =
y(
ˆ
θ
k
+ c
k
∆
k
)−y(
ˆ
θ
k
− c
k
∆
k
)
2c
k
∆
k1
.
.
.
y(
ˆ
θ
k
+ c
k
∆
k
)−y(
ˆ
θ
k
− c
k
∆
k
)
2c
k
∆
kp
=
y(
ˆ
θ
k
+ c
k
∆
k
)−y(
ˆ
θ
k
− c
k
∆
k
)
2c
k
.
∆
−1
k1
, ∆
−1
k2
, … , ∆
−1
kp
/
T
, (6.6)
where the mean-zero p-dimensional random perturbation vector,
∆
k
= [∆
k1
, ∆
k2
,
… ,
∆
kp
]
T
, has a user-specified distribution satisfying certain conditions and c
k
is a positive scalar (as with FDSA). Because the numerator is the same in all
p components of ˆg
k
(
ˆ
θ
k
), the number of loss measurements needed to estimate the
gradient in SPSA is two,regardlessofthedimensionp.
Relative to FDSA, the p-fold measurement savings per iteration, of course, pro-
vides only the potential for SPSA to achieve large savings in the total number of
measurementsrequired to estimate
θ when p is large. This potential is realizedif the
number of iterations required for effective convergence to an optimum θ
∗
does not
increase in a way to cancel the measurement savings per gradient approximation.
One can use asymptotic distribution theory to address this issue. In particular,
both FDSA and SPSA are known to be asymptotically normally distributed under
very similar conditions. One can use this asymptotic distribution result to charac-
terize the mean-squared error E
ˆ
θ
k
− θ
∗
2
for the two algorithms for large k.
Fortunately, under fairly broad conditions, the p-fold savings at each iteration is
preserved across iterations. In particular, based on asymptotic considerations:
Under reasonably general conditions (see Spall, 1992, or Spall, 2003, Chap. 7),
the SPSA and FDSA algorithms achieve the same level of statistical accuracy
for a given number of iterations even though SPSA uses only 1
|p times the
number of function evaluations of FDSA (since each gradient approximation
uses only 1
|p the number of function evaluations).
The SPSA Web site (www.jhuapl.edu|SPSA) includes many references on the
theory and application of SPSA. On this Web site, one can find many accounts
of numerical studies that are consistent with the efficiency statement above. (Of
course, given that the statement is based on asymptotic arguments and associ-
ated regularity conditions, one should not assume that the result always holds.)
In addition, there are references describing many applications. These include
queuing systems, pattern recognition, industrial quality improvement, aircraft
design, simulation-based optimization, bioprocess control, neural network train-
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
Stochastic Optimization 185
ing, chemical process control, fault detection, human-machine interaction, sensor
placement and configuration, and vehicle traffic management.
We will not present the formal conditions for convergence and asymptotic
normalityof SPSA,as suchconditionsareavailablein manyreferences(e.g.,Dippon
and Renz, 1997; Gerencsér, 1999; Spall, 1992, 2003, Chap. 7). These conditions are
essentially identical to the standard conditions for convergence of SA algorithms,
with the exception of the additional conditions on the user-generated perturbation
vector
∆
k
.
The choice of the distribution for generating the
∆
k
is important to the perfor-
mance of the algorithm. The standard conditions for the elements
∆
ki
of ∆
k
are
that the {∆
ki
} are independent for all k, i, identically distributed for all i at each k,
symmetrically distributed about zero and uniformly bounded in magnitude for
all k. In addition, there is an important inverse moments condition:
E
'
'
'
'
1
∆
ki
'
'
'
'
2+2τ
≤ C
for some
τ > 0 and C>0. The role of this condition is to control the variation
of the elements of ˆg
k
(
ˆ
θ
k
) (which have ∆
ki
in the denominator). One simple and
popular distribution that satisfies the inverse moments condition is the symmetric
Bernoulli ±1 distribution. (In fact, as discussed in Spall, 2003, Sect. 7.7, this
distribution can be shown to be optimal under general conditions when using
asymptotic considerations.) Two common mean-zero distributions that do not
satisfy the inverse moments condition are symmetric uniform and normal with
mean zero. The failureofboth ofthese distributions is a consequence of the amount
of probability mass near zero. Exercise 7.3 in Spall (2003) illustrates the dramatic
performance degradation that can occur through using distributions that violate
the inverse moments condition.
As with any real-world implementation of stochastic optimization, there are
important practical considerations when using SPSA. One is to attempt to define
θ
so that the magnitudes of the θ elements are similar to one another. This desire is
apparent bynoting thatthe magnitudes ofall components in the perturbations c
k
∆
k
are identical in the case where identical Bernoulli distributions are used. Although
it is not always possible to choose the definition of the elements in θ,inmost
cases an analyst will have the flexibility to specify the units for
θ to ensure similar
magnitudes. Another important consideration is the choice of the gains a
k
, c
k
.The
principles described for FDSA above apply to SPSA as well. Section 7.5 of Spall
(2003) provides additional practical guidance.
There have been a number of important extensions of the basic SPSA method
represented by the combination of (6.4) and (6.6). Three such extensions are to
the problem of global (versus local) optimization, to discrete (versus continuous)
problems, and to include second-order-type information (Hessian matrix) with
the aim of creating a stochastic analogue to the deterministic Newton–Raphson
method.
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

186 James C. Spall
TheuseofSPSAforglobal minimization among multiple local minima is dis-
cussed in Maryak and Chin (2001). One of their approaches relies on injecting
Monte Carlo noise in the right-hand side of the basic SPSA updating step in (6.4).
This approach is a common way of converting SA algorithms to global optimiz-
ers through the additional “bounce” introduced into the algorithm (Yin, 1999).
Maryak and Chin (2001) also show that basic SPSA without injected noise (i.e.,
(6.4) and (6.6) without modification) may, under certain conditions, be a global
optimizer. Formal justification for this result follows because the random error in
the SP gradient approximation acts in a way that is statistically equivalent to the
injected noise mentioned above.
Discrete optimization problems (where
θ may take on discrete or combined
discrete
|continuous values) are discussed in Gerencsér et al. (1999). Discrete SPSA
relies on a fixed-gain (constant a
k
and c
k
) version of the standard SPSA method.
The parameter estimates produced are constrained to lie on a discrete-valued
grid. Although gradients do not exist in this setting, the approximation in (6.6)
(appropriately modified) is still useful as an efficient measure of slope information.
Finally, using the simultaneous perturbation idea, it is possible to construct
a simple method for estimating the Hessian (or Jacobian) matrix of L while, con-
currently, estimating the primary parameters of interest (
θ). This adaptive SPSA
(ASP) approach produces a stochastic analogue to the deterministic Newton–
Raphson algorithm (e.g., Bazaraa et al., 1993, pp. 308–312), leading to a recursion
that is optimal or near-optimal in its rate of convergence and asymptotic error. The
approach applies in both the gradient-free setting emphasized in this section and
in the root-finding
|stochastic gradient-based (Robbins–Monro) setting reviewed
in Spall (2003, Chaps. 4 and 5). Like the standard SPSA algorithm, the ASP al-
gorithm requires only a small number of loss function (or gradient, if relevant)
measurementsper iteration – independentoftheproblem dimension– to adaptive-
ly estimate the Hessian and parameters of primary interest. Further information
is available at Spall (2000) or Spall (2003, Sect. 7.8).
Genetic Algorithms6.4
Introduction6.4.1
Genetic algorithms (GAs)represent a popular approach to stochastic optimization,
especially as relates to the global optimization problem of finding the best solution
among multiple local mimima. (GAs may be used in general search problems that
are not directly represented as stochastic optimization problems, but we focus
here on their use in optimization.) GAs represent a special case of the more general
class of evolutionary computation algorithms (which also includes methods such
as evolutionary programming and evolution strategies). The GA applies when the
elements of
θ are real-, discrete-, or complex-valued. As suggested by the name, the
GA is based loosely on principles of natural evolution and survival of the fittest.
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
Stochastic Optimization 187
Infact,inGAterminology,anequivalentmaximization criterion, such as −L(θ)
(or its analogue based on a bit-string form of θ),isoftenreferredtoasthefitness
function to emphasize the evolutionary concept of the fittest of a species.
A fundamental difference between GAs and the random search and SA al-
gorithms considered in Sects. 6.2 and 6.3 is that GAs work with a population
of candidate solutions to the problem. The previous algorithms worked with one
solutionand moved toward the optimumby updating this one estimate. GAssimul-
taneously consider multiple candidate solutions to the problem of minimizing L
and iterate by moving this population of solutions toward a global optimum. The
terms generation and iteration are used interchangeably to describe the process
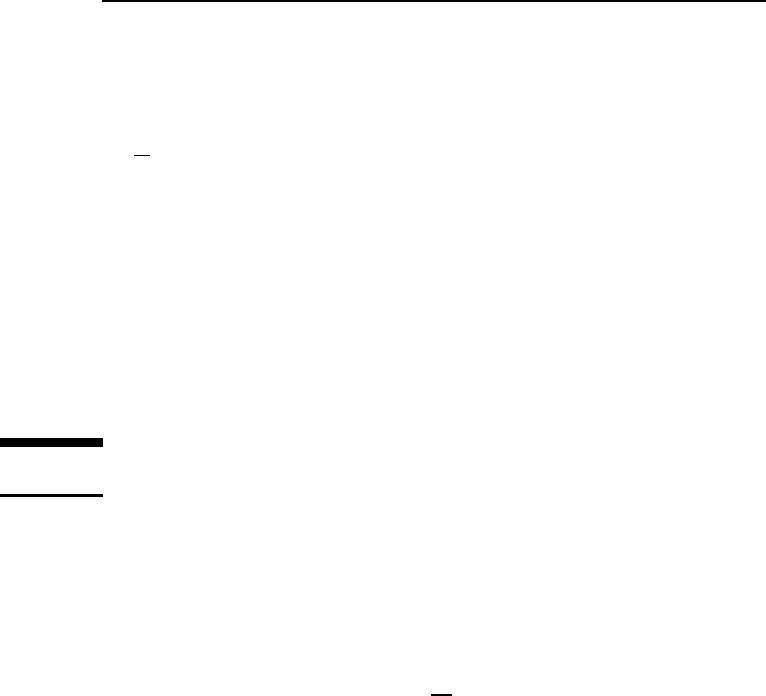
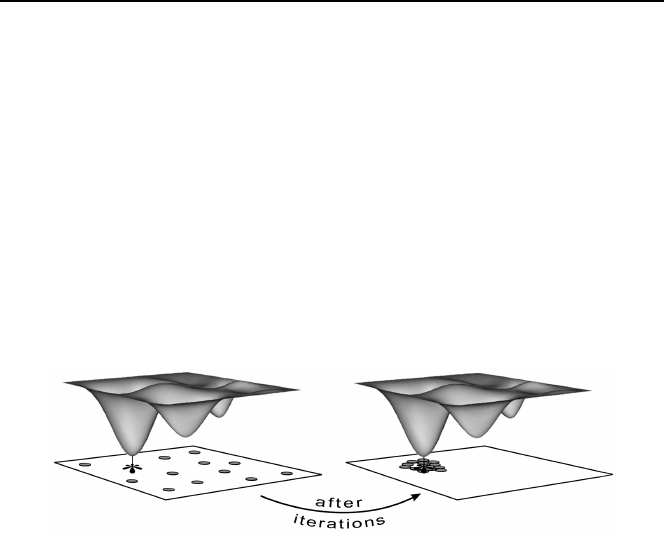
of transforming one population of solutions to another. Figure 6.3 illustrates the
successful operations of a GA for a population of size 12 with problem dimension
p
= 2. In this conceptual illustration, the population of solutions eventually come
together at the global optimum.
Figure 6.3. Minimization of multimodal loss function. Successful operations of a GA with
apopulationof12 candidate solutions clustering around the global minimum after some number of
iterations (generations) (Reprinted from Introduction to Stochastic Search and Optimization with
permission of John Wiley & Sons, Inc.)
The use of a population versus a single solution affects in a basic way the
range of practical problems that can be considered. In particular, GAs tend to be
best suited to problems where the loss function evaluations are computer-based
calculations such as complex function evaluations or simulations. This contrasts
with the single-solution approaches discussed earlier, where the loss function
evaluations may represent computer-based calculations or physical experiments.
Population-based approaches are not generally feasible when working with real-
time physical experiments. Implementing a GA with physical experimentsrequires
that either there be multiple identical experimental setups (parallel processing)
or that the single experimental apparatus be set to the same state prior to each
population member’s loss evaluation (serial processing). These situations do not
occur often in practice.
Specific values of
θ in the population are referred to as chromosomes.Thecen-
tral idea in a GA is to move a set (population) of chromosomes from an initial
collection of values to a point where the fitness function is optimized. We let N
denote the population size (number of chromosomes in the population). Most
of the early work in the field came from those in the fields of computer science
and artificial intelligence. More recently, interest has extended to essentially all
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
188 James C. Spall
branches of business, engineering, and science where search and optimization are
of interest. The widespread interest in GAs appears to be due to the success in
solving many difficult optimization problems. Unfortunately, to an extent greater
than with other methods, some interest appears also to be due to a regrettable
amount of “salesmanship” and exaggerated claims. (For example, in a recent soft-
ware advertisement, the claim is made that the software “… uses GAs to solve
any optimization problem.” Such statements are provably false.) While GAs are
important tools within stochastic optimization, there is no formal evidence of con-
sistently superior performance – relative to other appropriate types of stochastic
algorithms – in any broad, identifiable class of problems.
Let us now give a very brief historical account.The reader is directed to Goldberg
(1989, Chap. 4), Mitchell (1996, Chap. 1), Michalewicz (1996, pp. 1–10), Fogel (2000,
Chap. 3), and Spall (2003, Sect. 9.2) for more complete historical discussions.
There had been some success in creating mathematical analogues of biological
evolution for purposes of search and optimization since at least the 1950 s (e.g.,
Box, 1957). The cornerstones of modern evolutionary computation – evolution
strategies, evolutionary programming, and GAs – were developed independently
of each other in the 1960 s and 1970 s. John Holland at the University of Michigan
published the seminal monograph Adaptation in Natural and Artificial Systems
(Holland, 1975). There was subsequently a sprinkle of publications, leading to the
first full-fledged textbook Goldberg (1989). Activity in GAs grew rapidly beginning
in the mid-1980 s, roughly coinciding with resurgent activity in other artificial
intelligence-type areas such as neural networks and fuzzy logic. There are now
many conferences and books in the area of evolutionary computation (especially
GAs), together with countless other publications.
Chromosome Coding and the Basic GA Operations6.4.2
This section summarizes some aspects of the encoding process for the popula-
tion chromosomes and discusses the selection, elitism, crossover,andmutation
operations. These operations are combined to produce the steps of the GA.
An essential aspect of GAs is the encoding of the N values of
θ appearing in
the population. This encoding is critical to the GA operations and the associated
decoding to return to the natural problem space in
θ. Standard binary (0, 1) bit
strings have traditionally been the most common encoding method, but other
methods include gray coding (which also uses (0, 1) strings, but differs in the way
the bits are arranged) and basic computer-based floating-point representation
of the real numbers in
θ.This10-character coding is often referred to as real-
number coding since it operates as if working with θ directly. Based largely on
successful numerical implementations, this natural representation of
θ has grown
more popular over time. Details and further references on the above and other
coding schemes are given in Michalewicz (1996, Chap. 5), Mitchell (1996, Sects. 5.2
and 5.3), Fogel (2000, Sects. 3.5 and 4.3), and Spall (2003, Sect. 9.3).
Let us now describe the basic operations mentioned above. For consistency
with standard GA terminology, let us assume that L(
θ) has been transformed
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

Stochastic Optimization 189
to a fitness function with higher values being better. A common transformation
is to simply set the fitness function to −L(θ)+C,whereC ≥ 0 is a constant
that ensures that the fitness function is nonnegative on
Θ (nonnegativity is only
required in some GA implementations). Hence, the operations below are described
for a maximization problem. It is also assumed here that the fitness evaluations are
noise-free. Unless otherwise noted, the operations below apply with any coding
scheme for the chromosomes.
selection and elitism steps occur after evaluating the fitness function for the
current population of chromosomes. A subset of chromosomes is selected to use
as parents for the succeedinggeneration.This operation is where the survival of the
fittest principle arises, as the parents are chosen according to their fitness value.
While the aim is to emphasize the fitter chromosomes in the selection process,
it is important that not too much priority is given to the chromosomes with the
highest fitness values early in the optimization process. Too much emphasis of
the fitter chromosomes may tend to reduce the diversity needed for an adequate
search of the domain of interest, possibly causing premature convergence in a local
optimum. Hence methods for selection allow with some nonzero probability the
selection of chromosomes that are suboptimal.
Associated with the selection step is the optional “elitism” strategy, where the
N
e
<Nbest chromosomes (as determined from their fitness evaluations) are
placed directly into the next generation. This guarantees the preservation of the
N
e
best chromosomes at each generation. Note that the elitist chromosomes in the
original population are also eligible for selection and subsequent recombination.
As with the coding operation for
θ, many schemes have been proposed for the
selection process of choosing parents for subsequent recombination. One of the
most popular methods is roulette wheel selection (also called fitness proportionate
selection). In this selection method, the fitness functions must be nonnegative
on
Θ. An individual’s slice of a Monte Carlo-based roulette wheel is an area pro-
portional to its fitness. The “wheel” is spun in a simulated fashion N − N
e
times
and the parents are chosen based on where the pointer stops. Another popu-
lar approach is called tournament selection. In this method, chromosomes are
compared in a “tournament,” with the better chromosome being more likely to
win. The tournament process is continued by sampling (with replacement) from
the original population until a full complement of parents has been chosen. The
most common tournament method is the binary approach, where one selects two
pairs of chromosomes and chooses as the two parents the chromosome in each
pair having the higher fitness value. Empirical evidence suggests that the tour-
nament selection method often performs better than roulette selection. (Unlike
tournament selection, roulette selection is very sensitive to the scaling of the fit-
ness function.) Mitchell (1996, Sect. 5.4) provides a good survey of several other
selection methods.
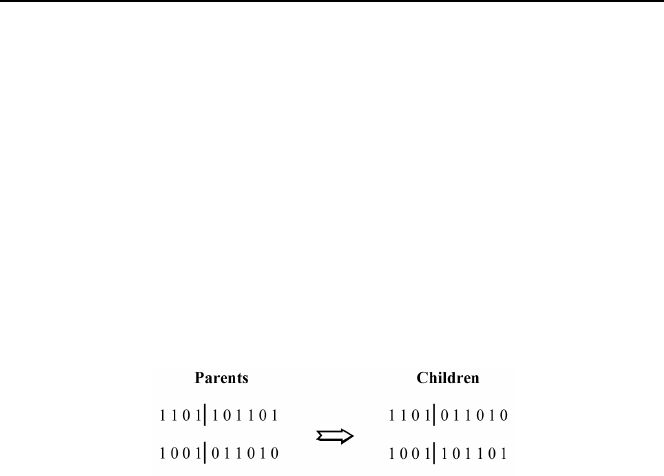
The crossover operation creates offspring of the pairs of parents from the
selection step. A crossover probability P
c
is used to determine if the offspring
will represent a blend of the chromosomes of the parents. If no crossover takes
place, then the two offspring are clones of the two parents. If crossover does take
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
190 James C. Spall
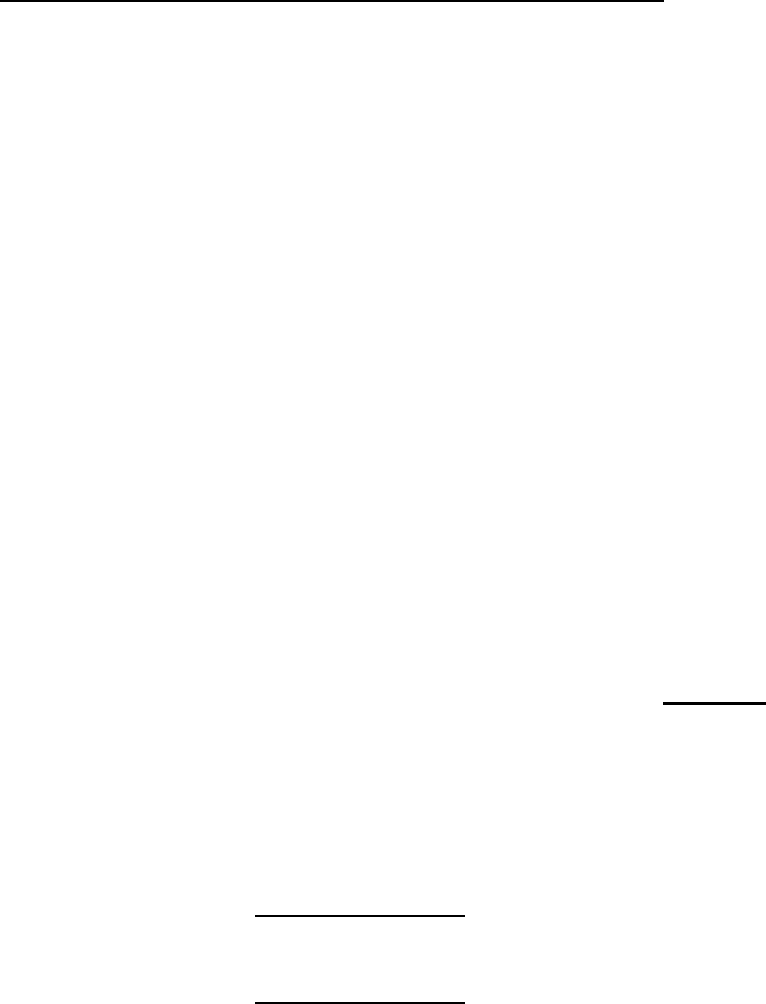
place, then the two offspring are produced according to an interchange of parts
of the chromosome structure of the two parents. Figure 6.4 illustrates this for
the case of a ten-bit binary representation of the chromosomes. This example
shows one-point crossover, where the bits appearing after one randomly cho-
sen dividing (splice) point in the chromosome are interchanged. In general, one
can have a number of splice points up to the number of bits in the chromo-
somes minus one, but one-point crossover appears to be the most commonly
used.
Note that the crossover operator also applies directly with real-number cod-
ing since there is nothing directly connected to binary coding in crossover. All
that is required are two lists of compatible symbols. For example, one-point
crossover applied to the chromosomes (
θ values) [6.7, −7.4, 4.0, 3.9|6.2, −1.5] and
[−3.8, 5.3, 9.2, −0.6|8.4, −5.1] yields the two children: [6.7, −7.4, 4.0, 3.9, 8.4, −5.1]
and [−3.8, 5.3, 9.2, −0.6, 6.2, −1.5].
Figure 6.4. Example of crossover operator under binary coding with one splice point
The final operation we discuss is mutation. Because the initial population may
not contain enough variability to find the solution via crossover operations alone,
the GA also uses a mutation operator where the chromosomes are randomly
changed. For the binary coding, the mutation is usually done on a bit-by-bit basis
where a chosen bit is flipped from 0 to 1, or vice versa. Mutation of a given bit
occurs with small probability P
m
. Real-number coding requires a different type
of mutation operator. That is, with a (0, 1)-based coding, an opposite is uniquely
defined, but with a real number, there is no clearly defined opposite (e.g., it does
not make sense to “flip” the 2.74 element). Probably the most common type of
mutation operator is simply to add small independent normal (or other) random
vectors to each of the chromosomes (the
θ values) in the population.
As discussed in Sect. 6.1.4, there is no easy way to know when a stochastic
optimization algorithm has effectively converged to an optimum. this includes
gas. The one obvious means of stopping a GA is to end the search when a budget
of fitness (equivalently, loss) function evaluations has been spent. Alternatively,
termination may be performed heuristically based on subjective and objective
impressions about convergence. In the case where noise-free fitness measure-
ments are available, criteria based on fitness evaluations may be most useful.
for example, a fairly natural criterion suggested in Schwefel (1995, p. 145) is to
stop when the maximum and minimum fitness values over the N population
values within a generation are sufficiently close to one another. however, this
criterion provides no formal guarantee that the algorithm has found a global
solution.
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
Stochastic Optimization 191
The Core Genetic Algorithm 6.4.3
The steps of a basic form of the GA are given below. These steps are general enough
to govern many (perhaps most) modern implementations of GAs, including those
in modern commercial software. Of course, the performance of a GA typically
depends greatly on the implementation details, just as with other stochastic opti-
mization algorithms. Some of these practical implementation issues are taken up
in the next section.
Core GA Steps for Noise-Free Fitness Evaluations
Step 0 (Initialization) Randomly generate an initial population of N chromosomes
and evaluate the fitness function (the conversion of L(
θ) to a function to be
maximized for the encoded version of
θ) for each of the chromosomes.
Step 1 (Parent Selection)SetN
e
= 0 if elitism strategy is not used; 0 <N
e
<N
otherwise. Select with replacement N − N
e
parents from the full population
(including the N
e
elitist elements). The parents are selected according to
their fitness, with those chromosomes having a higher fitness value being
selected more often.
Step 2 (Crossover) For each pair of parents identified in Step 1, perform crossover
on the parents at a randomly (perhaps uniformly) chosen splice point (or
points if using multi-point crossover) with probability P
c
.Ifnocrossover
takes place (probability 1−P
c
), then form two offspring that are exact copies
(clones) of the two parents.
Step 3 (Replacement and Mutation) While retaining the N
e
best chromosomes
from the previous generation, replace the remaining N − N
e
chromosomes
with the current population of offspring from Step 2. For the bit-based
implementations, mutate the individual bits with probability P
m
; for real
coded implementations, use an alternative form of “small” modification (in
either case, one has the option of choosing whether to make the N
e
elitist
chromosomes candidates for mutation).
Step 4 (Fitness and End Test) Compute the fitness values for the new population
of N chromosomes. Terminate the algorithm if the stopping criterion is met
or if the budget of fitness function evaluations is exhausted; else return to
Step 1.
Some Implementation Aspects 6.4.4
Whilethe above stepsprovidethebroad outlineformany modernimplementations
of GAs, there are some important implementation aspects that must be decided
before a practical implementation. This section outlines a few of those aspects.
More detailed discussions are given in Mitchell (1996, Chap. 5), Michalewicz (1996,
Chaps. 4–6), Fogel (2000, Chaps. 3 and 4), Goldberg (2002, Chap. 12), and other
references mentioned below. A countless number of numerical studies have been
reported in the literature; we do not add to that list here.
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

192 James C. Spall
As with other stochastic optimization methods, the choice of algorithm-specific
coefficients has a significant impact on performance. With GAs, there is a relatively
large number of user decisions required. The following must be set: the choice of
chromosome encoding, the population size (N), the probability distribution gen-
erating the initial population, the strategy for parent selection (roulette wheel or
otherwise), the number of splice points in the crossover, the crossover probabil-
ity (P
c
), the mutation probability (P
m
), the number of retained chromosomes in
elitism (N
e
), and some termination criterion. Some typical values for these quan-
tities are discussed, for example, in Mitchell (1996, pp. 175–177) and Spall (2003,
Sect. 9.6).
Constraints on L(
θ) (or the equivalent fitness function) and|or θ are of major
importancein practice.Thebit-basedimplementationofGAsprovide a naturalway
of implementing component-wise lower and upper bounds on the elements of
θ
(i.e., a hypercube constraint). More general approaches to handling constraints are
discussed in Michalewicz (1996, Chap. 7 and Sects. 4.5 and 15.3) and Michalewicz
and Fogel (2000, Chap. 9).
Until now, it has been assumed that the fitness function is observed without
noise. One of the two possible defining characteristics of stochastic optimization,
however, is optimization with noise in the function measurements (Property I
in Sect. 6.1.3). There appears to be relatively little formal analysis of GAs in the
presenceofnoise,althoughtheapplicationandtestingofGAsin suchcases hasbeen
carried out since at least the mid-1970 s (e.g., De Jong, 1975, p. 203). A large number
of numerical studies are in the literature (e.g., the references and studies in Spall,
2003, Sects. 9.6 and 9.7). As with other algorithms, there is a fundamental tradeoff
of more accurate information for each function input (typically, via an averaging
of the inputs) and fewer function inputs versus less accurate (“raw”) information
to the algorithm together with a greater number of inputs to the algorithm. There
appears to be no rigorous comparison of GAs with other algorithms regarding
relative robustness to noise. Regarding noise, Michalewicz and Fogel (2000, p. 325)
state: “There really are no effective heuristics to guide the choices to be made that
will work in general.”
Some Comments on the Theory for GAs6.4.5
One of the key innovations in Holland (1975) was the attempt to put GAs on
a stronger theoretical footing than the previous ad hoc treatments. He did this by
the introduction of schema theory. While many aspects and implications of schema
theory have subsequently been challenged (Reeves and Rowe, 2003, Chap. 3; Spall,
2003, Sect. 10.3), some aspects remain viable. In particular, schema theory itself is
generally correct (subject to a few modifications), although many of the assumed
implications have not been correct. With the appropriate caveats and restrictions,
schema theory provides some intuitive explanation for the good performance that
is frequently observed with GAs.
Morerecently,Markovchainshavebeenusedtoprovideaformalstructurefor
analyzing GAs. First, let us mention one negative result. Markov chains can be used
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

Stochastic Optimization 193
to show that a canonical GA without elitismis (in general) provably nonconvergent
(Rudolph, 1994). That is, with a GA that does not hold onto the best solution at
each generation, there is the possibility (through crossover and mutation) that
a chromosome corresponding to
θ
∗
will be lost. (Note that the GA without elitism
corresponds to the form in Holland, 1975.)
Onthe otherhand,conditionsforthe formal convergenceofGAs toan optimal
θ
∗
(or its coded equivalent) are presented in Vose (1999, Chaps. 13 and 14), Fogel
(2000, Chap. 4), Reeves and Rowe (2003, Chap. 6), and Spall (2003, Sect. 10.5),
among other references. Consider a binary bit-coded GA with a population size
of N and a string length of B bits per chromosome. Then the total number of
possible unique populations is:
N
P
≡
N +2
B
−1
N
=
(N +2
B
−1)!
(2
B
−1)!N!
(Suzuki, 1995). It is possible to construct an N
P
×N
P
Markov transition matrix P,
where the ijth element is the probability of transitioning from the ith population
of N chromosomes to the jth population of the same size. These elements depend
in a nontrivial way on N, the crossover rate, and the mutation rate; the number of
elite chromosomes is assumed to be N
e
= 1 (Suzuki, 1995). Let p
k
be an N
P
× 1
vector having jth component p
k
(j) equal to the probability that the kth generation
will result in population j, j = 1, 2, … , N
P
. From basic Markov chain theory,
p
T
k+1
= p
T
k
P = p
T
0
P
k+1
,
where p
0
isaninitialprobabilitydistribution.Ifthechainisirreducibleandergodic
(see, e.g., Spall, 2003, Appendix E), the limiting distribution of the GA (i.e.,
¯
p
T
=
lim
k→∞
p
T
k
= lim
k→∞
p
T
0
P
k
)existsand satisfies thestationarity equation
¯
p
T
=
¯
p
T
P.
(Recall from basic Markov chain theory that irreducibility indicates that any state
may be reached from any other state after a finite number of steps.)
Suppose that
θ
∗
is unique (i.e., Θ
∗
is the singleton θ
∗
). Let J ⊆{1, 2, … , N
P
}
be the set of indices corresponding to the populations that contain at least one
chromosome representing
θ
∗
. So, for example, if J = {1, 6, N
P
−3},theneachofthe
three populations indexed by 1, 6 and N
P
−3contains at least one chromosome
that,whendecoded,isequalto
θ
∗
. Under the above-mentioned assumptions of
irreducibility and ergodicity,
i∈J
¯
p
i
= 1,where
¯
p
i
is the ith element of
¯
p. Hence,
aGAwithN
e
= 1 and a transition matrix that is irreducible and ergodic converges
in probability to θ
∗
.
Toestablishthe factofconvergencealone,it maynotbe necessary tocomputethe
P matrix. Rather, it suffices to know that the chain is irreducible and ergodic. (For
example, Rudolph, 1997, p. 125, shows that the Markov chain approach yields con-
vergence when 0 <P
m
< 1.) However, P must be explicitly computed to get the rate
of convergence information that is available from p
k
.Thisisrarelypossibleinprac-
tice because the number of states in the Markov chain (and hence dimension of the
Markov transition matrix) grows very rapidly with increases in the population size
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

194 James C. Spall
and|or the number of bits used in coding for the population elements. For example,
in even a trivial problem of N = B = 6,thereare∼ 10
8
states and ∼ 10
16
elements
in the transition matrix; this problem is much smaller than any practical GA, which
can easily have 50 to 100 population elements and 15 to 40 bits per population el-
ement (leading to well over 10
100
states, with each element in the corresponding
row and column in the transition matrix requiring significant computation).
Concluding Remarks6.5
Stochastic optimization is a major branch of computational statistics. This paper
has been a whirlwind tour through some important issues and methods in stochas-
tic optimization. Stochastic optimization applies when there are noisy measure-
ments of the criterion being optimized and|orthereisaninjectedMonteCarlo
randomness as part of the algorithm. Of necessity, we cover only a small fraction of
available methods in this relatively brief review, although the methods described
(random search, stochastic approximation, and genetic algorithms) are represen-
tative of a broad range of important and widely used algorithms. Further, the
treatment here on the specific algorithms is relatively brief. In particular, the sub-
jects covered in this paper of approximately 30 pages are treated in over 160 pages
in Spall (2003, Chaps. 1–2, 6–7, and 9–10) and are given an even more detailed
treatment in the many specialized books or other references.
There are many challenges to carrying out real-world optimization, including
the presence of noise in the function evaluations, the difficulties in distinguishing
a globally optimal solution from locally optimal solutions, the “curse of dimen-
sionality,” the difficulties associated with nontrivial constraints, and the lack of
stationarity in the solution as a result of the conditions of the problem changing
over time. Stochastic optimization methods are especially useful in treating some
of these challenges. In particular, by definition, they are designed for noisy func-
tion evaluations. Further, when considering injected (Monte Carlo) randomness
(property II in Sect. 6.1.3), certain stochastic optimization algorithms will (under
conditions, of course) serve as global optimizers. That is, the injected randomness
provides enough “bounce” to the algorithm to allow for escape from local minima
en route to achieving a global minimum.
In summary, while classical deterministic optimization methods (linear and
nonlinear programming) are effective for a range of problems, stochastic methods
are able to handle many of the problems for which deterministic methods are
inappropriate. It is hoped that this summary gives the reader a flavor of the issues,
algorithms, and challenges in carrying out optimization in the face of stochastic
effects.
Acknowledgements. IappreciatethehelpfulcommentsofDr.StacyHillonadraft
version of this paper. Funding was provided by the U. S. Navy (contract N00024-
98-D-8124) and the JHU
|APL Independent Research and Development (IRAD)
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

Stochastic Optimization 195
Program. Selected parts of this article havebeenreprinted,bypermission,from J.C.
Spall, Introduction to Stochastic Search and Optimization,
c
2003 by John Wiley
and Sons, Inc.
References
Arsham, H. (1998), “Techniques for Monte Carlo Optimizing,” Monte Carlo Meth-
ods and Applications, vol. 4, pp. 181–229.
Baba, N., Shoman, T., and Sawaragi, Y. (1977), “A Modified Convergence Theorem
for a Random Optimization Method,” Information Sciences,vol.13,pp.159–166.
Bazaraa, M.S., Sherali, H.D., and Shetty, C.M. (1993), Nonlinear Programming:
Theory and Algorithms (2nd ed.), Wiley, New York.
Blum, J.R. (1954), “Multidimensional Stochastic Approximation Methods,” Annals
of Mathematical Statistics, vol. 25, pp. 737–744.
Box, G.E.P. (1957), “Evolutionary Operation: A Method for Increasing Industrial
Productivity,” Journal of the Royal Statistical Society, Ser. C., vol. 6, pp. 81–101.
De Jong, K.A. (1975), “An Analysis of the Behavior of a Class of Genetic Adaptive
Systems,” Ph.D. dissertation, University of Michigan, Ann Arbor, MI (Univer-
sity Microfilms no. 76–9381).
Dippon, J. and Renz, J. (1997), “Weighted Means in Stochastic Approximation of
Minima,” SIAM Journal of Control and Optimization, vol. 35, pp. 1811–1827.
Fabian, V. (1971), “Stochastic Approximation,” in Optimizing Methods in Statistics
(J.S. Rustigi, ed.), Academic Press, New York, pp. 439–470.
Fogel, D.B. (2000), Evolutionary Computation: Toward a New Philosophy of Ma-
chine Intelligence (2nd ed.), IEEE Press, Piscataway, NJ.
Fouskakis, D. and Draper, D. (2002), “Stochastic Optimization: A Review,” Inter-
national Statistical Review, vol. 70, pp. 315–349.
Fu, M.C. (2002), “Optimization for Simulation: Theory vs. Practice” (with discus-
sion by S. Andrad
´
ottir, P. Glynn, and J.P. Kelly), INFORMS Journal on Comput-
ing,vol.14,pp.192–227.
Gentle, J.E. (2003), Random Number Generation and Monte Carlo Methods (2nd
ed.), Springer-Verlag, New York.
Gerencsér, L. (1999), “Convergence Rate of Moments in Stochastic Approximation
with Simultaneous Perturbation Gradient Approximation and Resetting,” IEEE
Transactions on Automatic Control, vol. 44, pp. 894–905.
Gerencsér, L., Hill, S.D., and V
´
ag
´
o, Z. (1999), “Fixed Gain SPSA for Discrete Op-
timization,” in Proceedings of the IEEE Conference on Decision and Control,
7–10 December 1999, Phoenix, AZ, pp. 1791–1795.
Goldberg, D.E. (1989), Genetic Algorithms in Search, Optimization, and Machine
Learning, Addison-Wesley, Reading, MA.
Gosavi, A. (2003), Simulation-Based Optimization: Parametric Optimization Tech-
niques and Reinforcement Learning, Kluwer Academic, Boston.
Holland, J.H. (1975), Adaptation in Natural and Artificial Systems,Universityof
Michigan Press, Ann Arbor, MI.
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

196 James C. Spall
Karnopp, D.C. (1963), “Random Search Techniques for Optimization Problems,”
Automatica, vol. 1, pp. 111–121.
Kiefer, J. and Wolfowitz, J. (1952), “Stochastic Estimation of a Regression Func-
tion,”Annals of Mathematical Statistics, vol. 23, pp. 462–466.
Kolda, T.G., Lewis, R.M., and Torczon, V. (2003), “Optimization by Direct Search:
New Perspectives on Some Classical and Modern Methods,” SIAM Review,
vol. 45, pp. 385–482.
Kushner, H.J. and Yin, G.G. (1997), Stochastic Approximation Algorithms and Ap-
plications, Springer-Verlag, New York.
Maryak, J.L. and Chin, D.C. (2001), “Global Random Optimization by Simultane-
ous Perturbation Stochastic Approximation,” in ProceedingsoftheAmerican
Control Conference, 25–27 June 2001, Arlington, VA, pp. 756–762.
Matyas, J. (1965), “Random Optimization,” Automation and Remote Control,
vol. 26, pp. 244–251.
Michalewicz, Z. (1996), Genetic Algorithms + Data Structures = Evolution Pro-
grams (3rd ed.), Springer-Verlag, New York.
Michalewicz, Z. and Fogel, D.B. (2000), HowtoSolveIt:ModernHeuristics,
Springer-Verlag, New York.
Mitchell, M. (1996), An Introduction to Genetic Algorithms, MIT Press,Cambridge,
MA.
Nelder, J.A. and Mead, R. (1965), “A Simplex Method for Function Minimization,”
The Computer Journal, vol. 7, pp. 308–313.
Pflug, G.Ch. (1996), Optimization of Stochastic Models: The Interface Between
Simulation and Optimization, Kluwer Academic, Boston.
Reeves, C.R. and Rowe, J.E. (2003), Genetic Algorithms – Principles and Perspec-
tives:AGuidetoGATheory, Kluwer Academic, Boston.
Robbins, H. and Monro, S. (1951), “A Stochastic Approximation Method,” Annals
of Mathematical Statistics, vol. 22, pp. 400–407.
Rudolph, G. (1994), “Convergence Analysis of Canonical Genetic Algorithms,”
IEEE Transactions on Neural Networks,vol.5,pp.96–101.
Rudolph, G. (1997), Convergence Properties of Evolutionary Algorithms,VerlagKo-
vac, Hamburg.
Ruppert, D. (1991), “Stochastic Approximation,” in Handbook of Sequential Anal-
ysis (B.K. Ghosh and P.K. Sen, eds.), Marcel Dekker, New York, pp. 503–529.
Schwefel, H.-P. (1995), Evolution and Optimum Seeking,Wiley,NewYork.
Solis, F.J. and Wets, J.B. (1981), “Minimization by Random Search Techniques,”
Mathematics of Operations Research,vol.6,pp.19–30.
Spall, J.C. (1992), “Multivariate Stochastic Approximation Using a Simultaneous
Perturbation Gradient Approximation,” IEEE Transactions on Automatic Con-
trol, vol. 37, pp. 332–341.
Spall, J.C. (2000), “Adaptive Stochastic Approximation by the Simultaneous Per-
turbation Method,”IEEE Transactions on Automatic Control, vol. 45, pp. 1839–
1853.
Spall, J.C. (2003), Introduction to Stochastic Search and Optimization: Estimation,
Simulation, and Control,Wiley,Hoboken,NJ.
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)

Stochastic Optimization 197
Suzuki, J. (1995), “A Markov Chain Analysis on Simple Genetic Algorithms,” IEEE
Transactions on Systems, Man, and Cybernetics, vol. 25, pp. 655–659.
Wolpert, D.H. and Macready, W.G. (1997), “No Free Lunch Theorems for Optimiza-
tion,” IEEE Transactions on Evolutionary Computation, vol. 1, pp. 67–82.
Yin, G. (1999), “Rates of Convergence for a Class of Global Stochastic Optimization
Algorithms,” SIAM Journal on Optimization, vol. 10, pp. 99–120.
Zhigljavsky, A.A. (1991), Theory of Global Random Search, Kluwer Academic,
Boston.
Copyright Springer Heidelberg 2004.
On-screen viewing permitted. Printing not permitted.
Please buy this book at your bookshop. Order information see http://www.springeronline.com/3-540-40464-3
Copyright Springer Heidelberg 2004
Handbook of Computational Statistics
(J. Gentle, W. Härdle, and Y. Mori, eds.)
