Guaranteed Evader Detection in Multi-Agent Search
Tasks using Pincer Trajectories
Roee M. Francos and Alfred M. Bruckstein
Abstract—Assume that inside an initial planar area there
are smart mobile evaders attempting to avoid detection by a
team of sweeping searching agents. All sweepers detect evaders
with fan-shaped sensors, modeling the field of view of real
cameras. Detection of all evaders is guaranteed with cooperative
sweeping strategies, by setting requirements on sweepers’ speed,
and by carefully designing their trajectories. Assume the smart
evaders have an upper limit on their speed which is a-priori
known to the sweeping team. An easier task for the team of
sweepers is to confine evaders to the domain in which they are
initially located. The sweepers accomplish the confinement task
if they move sufficiently fast and detect evaders by applying an
appropriate search strategy. Any given search strategy results
in a minimal sweeper’s speed in order to be able to detect all
evaders. The minimal speed guarantees the ability of the sweeping
team to confine evaders to their original domain, and if the
sweepers move faster they are able to detect all evaders that
are present in the region. We present results on the total search
time for a novel pincer-movement based search protocol that
utilizes complementary trajectories along with adaptive sensor
geometries for any even number of pursuers.
I. INTRODUCTION
Motivation. The goal of this research is to provide effi-
cient “must-win” search strategies for a team of n identical
sweeping agents that must guarantee detection of an unknown
number of smart evaders that are initially located inside a given
circular region of radius R
0
while minimizing the search time.
The evaders move and try to escape the initial region and have
maximal speed of V
T
, known to the sweepers, and do not have
any turning constraints.
A smart evader is one that detects and responds to the
motions of searchers by performing optimal evasive maneu-
vers, to avoid interception. A smart evader is assumed to have
full knowledge of the search strategy of the sweeping team.
Possessing such knowledge enables smart evaders to plan their
movements in a way that maximizes the time required for
the pursuing sweepers to detect them. Guaranteed detection
of all evaders implies that for all particular choices of escape
strategies smart evaders may implement in response to the
motions of searches, they will all eventually be detected.
Agents gather information only from their sensors, and
evaders in a sweeper’s field of view are immediately detected.
There can be many evaders, and those can be located at any
point in the interior of the circular region at the beginning
of the search process. Importantly, in contradiction to most
recent literature on pursuit-evasion problems, the sweepers do
not have any information regarding evaders locations’ that
are outside of their sensing range, nor on the total number
of evaders they must detect. All sweepers move at a speed
V
s
> V
T
(measured at the center of the sensor that represents a
sweeper’s center of mass) and detect evaders using fan shaped
sensors with a given half-angle denoted by α and a length of
2r. Finding an efficient algorithm requires that, throughout
the sweep, the footprint of the sweepers’ sensors maximally
overlaps the evader region (the region where evaders may
possibly be) in order to detect as many evaders as possible.
The sweeping team consists of an even number of agents,
referred to as sweepers, that act as sensors and sweep the
region until all evaders are detected. The search is done by
pairs of agents sweeping toward each other for the purpose
of entrapping all evaders. Cooperation among agents scanning
adjacent sectors and sweep toward each other enables them to
entrap all evaders, regardless of evaders’ adversarial motions.
Since the sweepers do not have any additional knowledge
about the evaders whereabouts, or even if all evaders were
found at some intermediate point of time during the search,
the search is continued until the whole region is searched.
Additional information such as the number of evaders and
their exact locations provided to the sweeper team in advance,
could reduce the termination time by utilizing this knowledge
and organizing the entire search process differently. However
this is not the focus of this paper. Therefore, the resulting
search times for a circular environment can be seen as an
upper bound on the search time, resulting from the lack of
specific information about evaders locations.
We chose to analyze the performance of the system with
a fan-shaped sensor as this type of sensor is highly common
in many sensing and scanning applications, from optical to
radar and sonar. Fan-shaped sensors with a variable half-
angle resemble actual pinhole camera visual sensors of a given
aperture. Furthermore, a fan shaped sensor with a larger area
can reduce the critical speed and sweep time compared to
approaches that use linear sensors while avoiding the usage of
unrealistic sensors such as circular sensors which assume to
detect evaders in all angles around a searcher.
The considered protocol may be implemented in a 2D
environment in which the actual agents travel on a plane or
as a 3 dimensional search where the sweepers are drone-like
agents which fly over the evader area at different heights.
Guaranteed evader detection in practical robotic ap-
plications. A wide range of real-world tasks that are nowa-
days carried out by human-controlled machines are expected
to be replaced by partially autonomously operated robots
in the nearby future. Search and rescue missions, airborne
surveillance applications, various monitoring tasks for secu-
rity applications, wildlife tracking, fire control as well as
arXiv:2305.00533v1 [cs.MA] 30 Apr 2023
inspection tasks in hazardous zones can all benefit from the
theoretical and experimental results developed in this work.
The combination of the proposed search protocol and sensor
choice enables nearly optimal cooperation between agents and
allows the deployment of multi-robot teams with superior
performance.
For the mentioned applications, guaranteeing success in the
worst-case scenario ensures succeeding in the task for all other
simpler scenarios as well. This approach is often used in real-
world settings where full state information is not available and
performance guarantees must be kept.
The searching agents considered in this work do not assume
knowledge of the number of evaders present in the region,
their locations, or their escape plan and despite that they are
able to detect all of them. Therefore, this work is of prime
theoretical and practical importance as is in many pursuit-
evasion games the searching team does not have complete
information about its opposing team, as is often assumed by
many previous papers.
Since multi-agent pursuit-evasion search protocols mainly
utilize multi-agent UAVs, sweepers fly over the environment
containing the evaders, therefore investigating issues such as
obstacles is not the main focus of the work, because the
sweeping team flies over them. Obstacles limit the movements
and locations of ground-moving evaders, and therefore their
presence assists the searching team to detect them since it
limits the escape options of evaders, and thus does not impact
our “worst-case” analysis.
The mentioned protocols can use a vast suite of onboard
sensors to detect evaders, depending on the domain of ap-
plication. Potential choices vary from visual sensors such as
cameras which have the benefit of having a high resolution and
being lightweight. Therefore, detecting evaders with cameras
requires a smaller battery in order to accomplish the desired
task compared to other sensing modalities such as radars that
increase the weight of the payload and hence limit the duration
of the search mission due to increased energy consumption.
Actual detection of evaders can utilize a vast number of
computer-vision detection algorithms such as [1], [2].
Since to our use case, the preferred choice for the detection
modality is a camera, we extend and generalize previous works
on guaranteed detection of smart targets to accommodate
usage of such sensors. Previous works such as used circular
sensors and linear sensors. However, since both circular and
linear sensors offer simplistic assumptions about the area
detected by actual searching robot teams, in this work we
extend and generalize state-of-the art results on guaranteed
detection of smart evaders that use pincer sweeps between
searching pairs to search teams that use sensors modelling
actual visual detectors. Our obtained results are insensitive to
locations of evaders or their numbers. The proposed protocols
can be applied in other convex environments as well, by using
slight modifications to the explored sweeping strategies.
Overview of related research. Several interesting search
problems originated in the second world war due to the need
to design patrol strategies for aircraft aiming to detect ships
or submarines in the English channel, see [3]. Patrolling a
corridor with multi agent teams whose goal is ensuring detec-
tion and interception of smart evaders was also investigated in
[4] while optimally proven strategies were provided in [5]. A
somewhat related, discrete version of the problem, was also
investigated in [6]. It focuses on a dynamic variant of the
cooperative cleaners problem, a problem that requires several
simple agents to a clean a connected region on a grid with
contaminated pixels. This contamination is assumed to spread
to neighbors at a given rate.
In [7], [8], Bressan et al. investigate optimal strategies for
the construction of barriers in real-time aiming at containing
and confining the spread of fire from a given initial area of
the plane. The authors are interested in determining a minimal
possible barrier construction speed that enables the confine-
ment of the fire, and on determining optimality conditions for
confinement strategies.
A non-escape search procedure for evaders that are origi-
nally located in a convex region of the plane from which they
may move out of, is investigated in [9], and a cooperative
progressing spiral-in algorithm performed by several agents
with disk shaped sensors in a leader-follower formation is
proposed. In [10], McGee et al. investigate guaranteed search
patterns for smart evaders that do not have any maneuverability
restrictions except for an upper limit on their speed. The sensor
the agents are equipped with detects evaders within a disk
shaped area around the searcher’s location. Search patterns
consisting of spiral and linear sections are considered. In [11],
Hew investigates search for smart evaders by implementing
concentric arc trajectories with agents having disk-shaped
sensors similar to the ones used in [10]. The aim of search
protocol is to detect submarines in a channel or in a half plane.
Another set of related problems are pursuit-evasion games,
where the pursuers’ objective is to detect evaders and the
evaders objective is to avoid the pursuers. Pursuit-evasion
games include combinations of single and multiple evaders
and pursuers scenarios. These types of problems are addressed
in the context of perimeter defense games by Shishika et al.
in [12], [13], with a focus on utilizing cooperation between
pursuers to improve the defense strategy. In [12], implicit
cooperation between pairs of defenders that move in a “pincer
movement” is performed to intercept intruders before they
enter a planar convex region. In [14], pursuit–evasion problems
involving multiple pursuers and multiple evaders (MPME) are
studied. The original MPME problem is decomposed to a
sequence of simpler multiple pursuers single evader (MPSE)
problems by classifying if a pursuer is relevant or redundant
for each evader and only the relevant pursuers participate in
the MPSE pursuit of each evader. Pursuers and evaders are all
assumed to be identical, and pursuers follow either a constant
bearing or a pure pursuit strategy. The problem is simplified
by adopting a dynamic divide and conquer approach, where at
every time instant each evader is assigned to a set of pursuers
based on the instantaneous positions of all the players. The
original MPME problem is decomposed to a sequence of
simpler multiple pursuers single evader (MPSE) problems by
classifying if a pursuer is relevant or redundant for each
evader by using Apollonius circles. Only the relevant pursuers
participate in the MPSE pursuit of each evader.
Recent surveys on pursuit evasion problems are [15]–[17].
In [15], a taxonomy of search problems is presented. The
paper highlights algorithms and results arising from different
assumptions on searchers, evaders and environments and dis-
cusses potential field applications for these approaches. The
authors focus on a number of pursuit-evasion games that are
directly connected to robotics and not on differential games
which are the focus of the other cited surveys. [16] presents
a survey on pursuit problems with 1 pursuer versus 2 evaders
or 2 pursuers versus 1 evader are formulated as a dynamic
game and solved with general methods of zero-sum differential
games. In [17], the authors present a recent survey on pursuit-
evasion differential games and classify the papers according
to the numbers of participating players: single-pursuer single-
evader (SPSE), MPSE, one- pursuer multiple-evaders (SPME)
and MPME. In [18], a two-player differential game in which a
pursuer aims to capture an evader before it escapes a circular
region is investigated. In [19], the problem of border defense
differential game where M pursuers cooperate in order to
optimally catch N evaders before they reach the border of
the region and escape is investigated.
Contributions: We present a comprehensive theoretical and
numerical analysis of trajectories, critical speeds and search
times for a team of n cooperative sweeping agents equipped
with fan-shaped sensors with a variable half-angle, whose
mission is to guarantee detection of all smart evaders that are
initially located inside a given circular region from which they
may move out of to escape the pursuing sweeping agents.
• We present a novel pincer search strategy utilizing pincer
sweeps and complementing sensor geometries to improve
the detection capabilities of the search team.
• We develop analytic formulas for a search protocol, ap-
plicable to any even number of sweepers with fan-shaped
sensors with a given half-angle. Fan shaped sensors with
a variable half-angle that model the actual field-of-view
of visual sensors, therefore enabling the applicability of
the established results in real-world search scenarios.
• We extend state-of-the-art multi-pursuer multi-evader lit-
erature to scenarios with arbitrary large numbers of
evaders, where very limited information is available to the
pursuers, and even so they are able to optimally cooperate
in order to successfully complete their mission.
The research performed in this paper extends and gener-
alizes previous results on linear and circular sensors such as
[10], [20] to fan-shaped sensors with an arbitrary angle. Since
“at the limit”, a linear shaped sensor is a special case of a fan
shaped sensor with an angle of 0 and circular or disk-shaped
sensors are fan shaped sensors with an angle of 2π.
Hence the analysis performed in this work provides a signif-
icant theoretical milestone in generalizing previous results and
allowing the application of the established results to practical
robotic vision-based search tasks.
Numerical Evaluation. The theoretical analysis is comple-
mented by simulation experiments in MATLAB and NetLogo
that verify the theoretical results, highlight the performance of
search strategies with different number of sweepers and sen-
sors and illustrates them graphically in the figures embedded
throughout the text and in the accompanying video.
Paper Organization. The paper is organized as follows:
Section 2 describes the motivation and setting for using pincer-
based search strategies. Section 3 presents a optimal lower
bound on the sweepers’ speed that is independent of the spe-
cific chosen sweep protocol. In section 4, an analytical analysis
of critical speeds and sweep time is provided, accompanied by
numerical results. In the last section conclusions are given and
future research directions are discussed.
II. PINCER-BASED SEARCH PROBLEM FORMULATION
Inherently, the complete search time of the region depends
on the sweeping protocol the sweeping team implements.
The protocols we propose aim to reduce the radius of the
circle bounding the evader region after each full sweep. This
guarantees complete elimination of the potential area where
evaders may be located.
At the beginning of the search, we assume the entire area of
the sweepers’ sensors is inside the evader region. This implies
that the full length of the central line of the sweepers’ sensors
(see the light green lines that depicts this part of the sensor in
Fig. 1) is inside the evader region, i.e., a footprint of length 2r.
The sweepers’ sensors are shown in green in Fig. 1 as well.
The blue circle on the light green line depicts the center of the
sensor of clockwise sweeping agent (and therefore its center
of mass). α denotes the half-angle of the sweepers fan-shaped
sensors.
If we were to distribute sweepers equally along the bound-
ary of the initial evader region, and have them move in the
same direction, potential escape from the points adjacent to
the starting locations of the sweepers might occur. To enable
sweepers to succeed in the task while having the lowest
possible critical speed, we propose that pairs of sweepers
move out in opposite directions along the boundary of the
evader region and sweep in a pincer movement instead of
implementing a protocol where all sweepers move in the same
direction along the boundary.
The proposed strategy can be applied with any even number
of sweepers. Each sweeper is responsible for an angular sector
of the evader region that is proportional to the number of
sweepers. The sweepers’ field-of-views are initially positioned
in pairs back-to-back. One sweeper in the pair moves counter-
clockwise while the other sweeper in the pair moves clock-
wise. Once the sweepers meet, i.e. their sensors are again
superimposed at a meeting point, they switch the directions
in which they move. Changing of directions takes place every
time sweepers “bump” into each other.
It is worth emphasizing that once a sweeper leaves a location
that was cleared from evaders, other evaders may attempt
to reach this location again. Therefore, the proposed sweep
protocol must ensure that there is no evaders strategy that
enables any evader to escape even if evaders wait at the edge
of a cleared location and start their escape instantly after a
sweeper leaves this location.
Sweepers implementing pincer movements solve the prob-
lem of evader region’s spread from the ”most dangerous
points”. Evaders located at these points have the maximum
time to escape throughout the sweepers’ movements. Conse-
quently, if evaders attempting to escape from these locations
are detected, evaders attempting to escape from all other
locations are detected as well. When a pair of sweepers
travelling in a pincer movement finishes sweeping its allocated
section of the environment (particularly an angle of
2π
n
− γ,
which is explained in detail in the next section), provided they
move at a speed exceeding the critical speed, the spread of the
evader region that originates from these points has to be less
than 2r. Therefore, the sweepers advance towards the center
of the evader region by the margin between the spread of the
evader region during this motion and 2r.
Since a pair of sweepers begin their sweep when the foot-
prints of their sensors are “back-to-back”, the evader region’s
points that should be considered to guarantee detection of all
evaders are located at the inner tips of the central part of the
sweepers’ sensors closest to the center of the evader region
and not from points on the boundary of the evader region.
If all sweepers move in the same direction following
their equally spaced placement around the region, the evader
region’s points that need to be considered for limiting the
region’s spread are points located on the boundary of the
evader region. This will in turn result in higher critical speeds
for sweepers implementing same-direction sweeps. Requiring
higher critical speeds also results in longer sweep times for
same-direction protocols compared to pincer based methods.
In [21], a quantitative analysis comparing critical speeds and
sweep times between pincer-based search protocols and same-
direction protocols operated by the same teams of sweepers
is investigated for agents with different sensors and sweep
protocols then the ones considered in this work. The analysis
in [21] indicates that the critical speeds and sweep times
for agents employing same direction sweeps is indeed higher
compared to the pincer-based speeds. We assume this applies
in this settings as well and plan to analytically compare these
search methodologies in future work.
The proposed search pattern uses spiral scans, related to
the sweep pattern suggested in [10]. In order to have maximal
sensor footprint intersecting the evader region throughout the
sweep, the proposed search pattern aims to track the expanding
evader region’s “wavefront”.
Simulations demonstrating the evolution of the search strate-
gies are generated using NetLogo software [22] and shown in
Fig. 2. Green areas are locations that are free from evaders and
red areas indicate locations where potential evaders may still
be located. Fig. 2 shows the cleaning progress of the evader
region when 4 sweepers employ the proposed sweep protocol.
Comparison to related research. In [23], the confinement
and complete detection tasks for a line formation of agents
or alternatively for a single agent with a linear sensor are
Fig. 1. Initial placement of 2 sweepers employing the spiral pincer sweep
strategy.
Fig. 2. Swept areas and evader region status for different times in a scenario
where 4 agents employ the spiral pincer sweep process and α = 30
◦
. (a)-
shows the status at beginning of first cycle, (b)- shows the status midway
through the first cycle, (c)-shows the status at beginning of the second cycle
and (d) shows the status toward the end of the second cycle.
analyzed. The presented approach ensures detection of all
evaders, however the complete detection time and the critical
speeds required for the sweeping formation to succeed in
its task are inferior to the results achieved in this work,
since no pincer sweeps are performed and since the line
formation performs simple circular motion and does not track
the expanding wavefront of potential evader locations as is
performed in this work. In [20], teams of agents perform pincer
sweep search strategies with linear sensors. These two early
works assume linear sensors and not fan-shaped sensors as the
ones assumed in this paper, hence this paper can be regarded as
a generalization of the results from [20] to fan-shaped sensors
with a given half-angle that model the field-of-view of actual
cameras allowing applicability of the results to real robotic
search and surveillance missions.
While automated discovery of search policies relies on
knowledge of the players’ locations throughout the search
process (as assumed in [12], [13]), to plan the trajectories
of pursuers and evaders, in our setting we bypass the need
for such extensive and often unrealistic knowledge of the
environment and perfect communication exchange between

members of the same team with a simple and efficient strategy.
Furthermore, in contrast to [12], [13] we do not assume a finite
number of evaders and that each sweeper can intercept only a
single evader, and guarantee interception of all evaders.
As opposed to our work, references [10], [11] use a disk
shaped sensor with a radius of r, and do not calculate
the detection times of all evaders. Although the works in
references [12], [13] use pincer movements between pairs of
defenders as well, they have a different objective of protecting
an initial region from invaders, contrary to our goal which is
to detect all evaders that may spread from the interior of the
region. Furthermore these works are concerned with devising
policies for intercepting as many intruders as possible relying
on an assumption that the number of intruders is finite and
that each defender can only intercept a single intruder and not
on guaranteeing interception of all evaders or intruders, as is
the aim of our work.
Contrary to the work reported in references [18], [19], we
do not assume the number of evaders is known to the pursuers
and not that the members of each party have full access to the
locations of the members of the opposing party and use it
in order to plan their actions. From our point of view using
such information is unrealistic for search applications where
determining the locations of the opposing team members
is at the heart of the problem. Such knowledge requires
very sophisticated sensing capabilities when searching large
regions. Furthermore, we solve the assignment of pursuers to
evaders elegantly by assigning sweeper pairs based on their
geometric location. This simple assignment rule alleviates the
need for communicating synchronized and precise location
information between the searchers.
III. LOWER BOUND ON THE SPEED OF SWEEPERS WITH
FAN-SHAPED SENSORS
We present an optimal bound on the speed of sweepers
equipped with fan shaped sensors. The developed bound
is irrespective of the choice of the implemented sweeping
protocol. This bound serves as one of the benchmarks that are
used to compare the performance of different search strategies
by a metric we refer to as the critical speed.
The largest number of evaders are detected when the entire
fan shaped sensor overlaps the evader region. For a fan shaped
sensor of length 2r and half angle α the maximal rate of
detecting evaders must be higher than the minimal expansion
rate of the evader region. Else, there is no feasible sweeping
protocol that can ensure the detection of all evaders.
The lower bound is derived for a sweeper team containing n
identical sweepers. The smallest sweeper’s speed that ensures
the maximal detection rate is larger than the minimal expan-
sion rate is based purely on geometric properties of the evader
region, the sweepers sensors’ dimensions and the evaders’
maximal speed. This lower bound on the speed is defined as
the critical speed and is denoted by V
LB
.
V
LB
=
πR
0
V
T
nr
(1)
This lower bound is similar for line sensors and its proof
follows the derivation such a lower bound for a sweeper’s
critical speed in [20]. Similar results for the bound in [20] for
sweepers with circular sensors are given in [10].
If sweepers move at speeds that exceed the critical speed,
they possess the ability to implement a suitable sweep protocol
that decreases the evader region, therefore allowing them to
sweep the next iteration around a smaller region. Therefore,
the critical speed is calculated based on the sweep around
the initial and largest radius, since sweeping around smaller
regions takes less time. Therefore, if the sweepers succeeded
in confining evaders to the larger and initial evader region
they will surely succeed when the evader region decreases
throughout the search protocol (since their speed stays constant
throughout the protocol).
IV. SPIRAL PINCER SWEEP STRATEGIES FOR SWEEPERS
WITH FAN-SHAPED SENSORS
A. The Critical Speed
In order for the sweeper team to efficiently scan the region,
we desire that there will be maximal intersection between
the sweepers’ sensors and the evader region. Implementing
spiral trajectories, in which sweepers’ sensors track the ex-
panding evader region’s wavefront, allows the sweeping team
to achieve nearly optimal efficiency as proven in this section.
We consider a scenario in which a sweeping team consisting
of n sweepers, where n is even. All sweepers have fan-shaped
sensors with finite visibility that model the sensor geometry of
real cameras. Sweepers’ sensors have a diameter length of 2r
and a half-angle of α, as shown in Fig. 1. Selecting sweepers
with complementing sensor geometries along with having the
sweepers move in opposite directions prevents evaders from
devising an escape strategy that leverages the gap between the
sweepers’ sensors, since the field-of-views of each sweeping
pair are tangent to each other. These considerations highlight
the benefits of using both pincer sweeps along with sensor
geometries between sweeping pairs that complete each other
in order to achieve maximal evader detection performance.
Fig. 1 shows the initial setting of the problem when 2 sweep-
ers perform the search. The symmetry between the trajectories
of adjacent searching pairs prevents potential escape of evaders
from point P = (0, R
0
), ”the most dangerous point“ evaders
may attempt to escape from due to similar consideration as
are proven in [23].
Hence, a sweeper’s critical speed depends solely on the time
required for it to sweep its allocated angular sector. Define by
γ the angle describing the offset angle of the center of the
sweeper from the center of the region at the beginning of the
sweep process, see Fig. 1 for a geometric illustration of γ.
The relation between γ and α obtained by using the law of
cosines on the depicted triangles of Fig. 1 and is given by,
4r
2
= R
0
2
+(R
0
− 2r + r cos α)
2
−2R
0
(R
0
− 2r + r cos α) cos γ
(2)
Rearranging terms yields,
γ = arccos
2R
0
2
+2R
0
r(cos α−2)+r
2
cos α(cos α−2)
2R
0
(R
0
+r cos α−2r)
(3)
Therefore, at each sweep agents traverse an angle of
2π
n
− γ.
After sweepers complete searching their allocated sector, and
only if they move at a sufficient speed, they advance toward
the center of the evader region together. If the search is planar,
sweepers switch the sweeping directions following an inward
movement toward the center. If the search is 3 dimensional,
sweepers first move together toward the center of the region
and only afterwards exchange the sector they sweep with
the sweeping teammate they perform the pincer sweep with.
Following this motion they commence sweeping an evader
region bounded by a circle with a smaller radius.
Sweepers begin their spiral motion with the outer tip of the
central line of their fan-shaped sensor tangent to the evader
region’s boundary. To preserve the outer central tip of their
sensor tangent to the evader region, sweepers move with an
angular offset of φ to the normal of the evader region (at
each point) throughout their sweep. φ is the angle between
the outer tip of the central line of a sweeper’s sensor and the
normal of the evader region at the meeting point between the
evader region and the tip of the central line of the sensor that
is furthest from the center of the evader region (see the light
green line that depicts this part of the sensor in Fig. 1). φ
depends on the ratio between the sweeper and evader speeds
(see Fig. 1 for its depiction). The sweepers’ incentive to move
at a constant angle φ to the normal of the evader region is
to preserve the evader region’s circular shape and to keep as
much of their sensor footprint inside the evader region at all
times in order to detect a maximal number of evaders. φ is
given by,
sin φ =
V
T
V
s
(4)
Because spiral sweeping preserves the evader region’s cir-
cular shape, as a result of the isoperimeteric inequality such
trajectories necessitate that the length of the curve bounding
the evader region is minimal and therefore the time required
for the sweepers to sweep around it is minimal as well. Denote
by θ
s
the sweeper’s angular speed, given by,
dθ
s
dt
=
V
s
cos φ
R
s
(t)
=
p
V
s
2
− V
T
2
R
s
(t)
(5)
Integration of (5) with the initial and final sweep times of the
angular sector as the integral’s limits is,
ˆ
t
θ
0
˙
θ (ζ)dζ =
ˆ
t
θ
0
p
V
s
2
− V
T
2
V
T
ζ + R
0
− r
dζ (6)
With a solution for θ (t
θ
) obtained from (6) given by,
θ (t
θ
) =
p
V
s
2
− V
T
2
V
T
ln
V
T
t
θ
+ R
0
− r
R
0
− r
(7)
Raising by an exponent (7) yields,
(R
0
− r) exp
V
T
θ(t
θ
)
p
V
s
2
− V
T
2
!
= V
T
t
θ
+ R
0
− r = R
s
(t
θ
)
(8)
The time required for a sweeper to scan its allocated angular
section corresponds to it sweeping an angle of θ by
2π
n
− γ
around the region. While the sweeper performs this motion, the
evader region’s expansion must be at most 2r from its initial
radius. Otherwise, the sweepers will not be to detect potential
evaders attempting to escape from the region. Allowing a
spread of at most 2r is a simplification of the problem that
assumes that while the sweepers progress toward the center
of the evader region the evaders do not spread. Obviously this
is not a realistic assumption, hence we address this case after
the solution of the simplified setting. To guarantee that no
potential evader escapes the sweepers, following a sweep by
2π
n
− γ we must demand that,
R
0
+ r ≥ R
s
(t
2π
n
−γ
) (9)
Define,
λ
∆
= exp
(
2π
n
− γ)V
T
p
V
s
2
− V
T
2
!
(10)
Replacing R
s
(t
2π
n
−γ
) with the expression derived for the tra-
jectory of the sweeper’s center results in, R
0
+r ≥ (R
0
− r) λ.
Hence, to guarantee no potential evader escapes without being
detected by the sweeper team, it is mandatory for the sweep-
ers’ speed to exceed,
V
S
≥ V
T
v
u
u
u
t
2π
n
− γ
2
ln
R
0
+r
R
0
−r
2
+ 1 (11)
As mentioned earlier, in order to accommodate the ex-
pansion of evaders during the inward motion of sweepers
a modification to the critical speed in (11) must be made.
This change requires that when sweepers move inwards after
they finish their sweep, they must meet the evader region’s
expanding wavefront that moves outwards from every point
in the evader region with a speed of V
T
at the previous
radius R
0
. Incorporating this constraint into the solution of
the critical speed guarantees that no evaders escape during the
sweepers inwards motion as well. Denote by T
c
the evader
region’s expansion throughout the first sweep. In order for no
evader to escape detection the following inequality must hold,
V
T
T
c
≤
2rV
s
V
s
+V
T
. Replacing T
c
with
(R
0
−r)(λ−1)
V
T
results in,
(R
0
− r) (λ − 1) =
2rV
s
V
s
+ V
T
(12)
Theorem 1. For a spiral pincer sweep protocol with n
sweepers in which n is even, the critical speed , V
s
, that allows
the sweeping team to confine all evaders to their original
domain is computed from,
V
s
= V
T
1
1 −
2r
(R
0
−r)(λ−1)
(13)
The solution for the critical speed is calculated numerically
by applying the Newton–Raphson method. The simplified
critical speed of (11) serves as an initial guess. In the rest of
the article the critical speed considered is that of theorem 3,
thus it accounts for the expansion of the evader region during
the sweepers advancements into the center of the region.
B. Analytical Sweep Time Analysis
Theorem 2. For a team of n sweepers implementing the pincer
sweep protocol, the time required to detect all evaders in the
region and reduce the evader region’s area to 0 is given by the
sum of inward advancement times after all the sweeps,T
in
(n),
along with the sum of all the spiral traversal times, T
spiral
(n)
in all sweeps. Hence,
T (n) = T
in
(n) + T
spiral
(n) (14)
Proof. Denote by ∆V > 0 the excess speed of a sweeper
above the critical speed. The sweeper’s speed hence is V
s
=
V
c
+∆V . Let θ (t
θ
) denote the angle of a sweeper with respect
to the center of evader region. At the start of each sweep the
center of a sweeper’s sensor is located at a distance of R
i
− r
from the center of the evader region. θ (t
θ
) is calculated in
(7). Replacing R
0
with R
i
yields,
θ (t
θ
) =
p
V
s
2
− V
T
2
V
T
ln
V
T
t
θ
+ R
i
− r
R
i
− r
(15)
Denote by T
spiral
i
the time required for a sweeper to sweep
an angle of θ (t
θ
) =
2π
n
− γ
i
. This time can be calculated by
rearranging terms in (15) and equals,
T
spiral
i
=
(R
i
− r) (λ − 1)
V
T
(16)
In case sweepers move at speeds exceeding the critical speed
appropriate for the scenario, denote the distance every sweeper
advances toward the center of the evader region by δ
i
(∆V ).
Following this inward motion, the evader region decreases and
is contained inside a smaller circular evader region having a
radius of R
i+1
= R
i
− δ
i
(∆V ). Hence δ
i
(∆V ) equals,
δ
i
(∆V ) = 2r − V
T
T
spiral
i
, 0 ≤ δ
i
(∆V ) ≤ 2r (17)
The number of sweepers, the half-angle of their sensors and
the sweep cycle number (the number representing the number
of sweeps already completed by the sweeping team around the
evader region) all influence the distance sweepers are able to
progress inwards toward the center of the evader region after
completing a sweep. If the evader region was not expanding
throughout the sweepers’ inward motion, then δ
i
(∆V ) is,
δ
i
(∆V ) = 2r − (R
i
− r) (λ − 1) (18)
In the expression δ
i
(∆V ), ∆V expresses the sweeper’s excess
speed above the critical speed. Denote by i the sweep cycle
number that starts from sweep number 0. As mentioned earlier
in the development of the critical speed, the time required for
sweepers to advance toward the center of the evader region
up to the point in which their sensors fully overlap the evader
region depends on the relative speed between the sweepers
inwards entry speed and the evader region outwards expansion
speed. Hence, after sweepers finish a sweep they advance
toward the center of evader region by a distance of,
δ
i
ef f
(∆V ) = δ
i
(∆V )
V
s
V
s
+ V
T
(19)
Following the completion of a sweep around the region,
sweeper pairs progress together in the direction of the evader
region’s center. During inwards motions, sweepers move at
speed of V
s
, up to the point in which they begin to spirally
sweep again once their sensors are fully over the evader
region’s expanding wavefront. Therefore, their speed is always
bounded. We assume as a worst-case assumption, that the
sweeper’s sensors detect evaders only when sweepers perform
spiral motions. Therefore, throughout inward motions no de-
tection of evaders occurs, while the evader region continues to
expand due to motions of evaders. In the video accompanying
the paper, the time it takes the sweepers to advance inwards
is taken into account and dictates the new radius of the evader
region after the sweep. Hence, after an inward advancement
the evader region is within a circle whose radius is,
R
i+1
= R
i
− δ
i
(∆V )
V
s
V
s
+ V
T
(20)
Denote by
e
R
i
= R
i
−r. The usage of
e
R
i
allows to analytically
solve for the number of sweeps required to complete the search
of the entire evader region. Replacing δ
i
(∆V ) into (20) yields
the following difference equation,
e
R
i+1
=
e
R
i
V
T
+ V
s
λ
V
s
+ V
T
−
2rV
s
V
s
+ V
T
(21)
Denote the coefficients of (21) by, c
1
= −
2rV
s
V
s
+V
T
, c
2
=
V
T
+V
s
λ
V
s
+V
T
. Hence,
e
R
i+1
= c
2
e
R
i
+ c
1
(22)
Denote by R
N
the radius of the circle bounding the evader
region when it is shrunk to be within a circle having a radius
smaller or equal to 2r. Calculating R
N
is possible only after
the number of sweeps around the region, N
n
, is calculated.
Hence, we use
b
R
N
= 2r as an estimate of R
N
to allow the
calculation of N
n
. The number of sweeps required to decrease
the evader region to be within a circle of radius
b
R
N
= 2r is,
N
n
=
ln
r(3−λ)
R
0
(1−λ)+r(1+λ)
ln
V
T
+V
s
λ
V
s
+V
T
(23)
The ceiling operator is used since the number of sweeps
must be integer. This means that sweepers continue sweep
number N
n
even if the evader region’s radius is reduced to
less 2r throughout the final spiral sweep. Hence, to facilitate
the calculation of N
n
we assume the last sweep occurs when
the evader region is within a circle of radius
b
R
N
= 2r. Denote
by T
in
i
the duration of each inwards motion. It is a function
of the sweep cycle number and equals,
T
in
i
=
δ
i
ef f
(∆V )
V
s
=
2r −
e
R
i
(λ − 1)
V
s
+ V
T
(24)
Denote the sum of all inward advancement times up to the
point in which the evader region is within a circle of radius
smaller than or equal to 2r as
e
T
in
(n), i.e.
e
T
in
(n) =
N
n
−2
P
i=0
T
in
i
.
During inwards motions the sweepers’ sensors are not fully
inside the evader region, hence they detect evaders in locations
that are already free from evaders. Hence, we assume that
sweepers do not detect evaders until they complete their
inward motion and begin sweeping again. The total sweep
times until the evader region is within a circle having a radius
less than or equal to 2r is computed as the addition of the total
spiral sweep times and the total inward advancement times.
Therefore,
e
T (n) =
e
T
in
(n) +
e
T
spiral
(n) (25)
The sum of all inward motion times until the evader region
is reduced to be within a circle having a radius less than or
equal to 2r is,
e
T
in
(n) =
N
n
−2
P
i=0
T
in
i
=
2r
V
s
+V
T
+
R
0
−r
V
s
+
2r(V
T
+V
s
λ)
V
s
(V
s
+V
T
)(1−λ)
−
(V
T
+V
s
λ)
N
n
−1
V
s
(V
s
+V
T
)(1−λ)
(R
0
(1 − λ) + r (1 + λ))
(26)
During the final inward motion, sweepers advance toward
the region’s center and place the inner tips of the central part
of their sensors at the center of the evader region. Afterwards,
the sweepers perform a final circular sweep and complete the
detection of all evaders in the region. The time required to
perform this motion is denoted by T
in
last
(n) and is given by
T
in
last
(n) =
R
N
V
s
, resulting in,
R
N
= −
2r
1 − λ
+ c
2
N
n
R
0
(1 − λ) + r (1 + λ)
1 − λ
(27)
By replacing the exact value of R
N
from (27) in T
in
last
(n)
we obtain,
T
in
last
(n) = −
2r
V
s
(1 − λ)
+ c
2
N
n
R
0
(1 − λ) + r (1 + λ)
V
s
(1 − λ)
(28)
The time required for sweeping around radius
e
R
i
is computed
by multiplying
e
R
i
by
λ−1
V
T
. Hence, multiplying (21) by
λ−1
V
T
yields the following sweep times difference equation,
T
i+1
= c
2
T
i
+ c
3
(29)
Where c
3
=
−2rV
s
(λ−1)
(V
s
+V
T
)V
T
. The equation for computing the total
spiral sweep times up to the point at which the evader region
is within a circle of radius less or equal to 2r is,
e
T
spiral
(n) =
T
0
− c
2
T
N
n
−1
+ (N
n
− 1) c
3
1 − c
2
(30)
Replacing the coefficients into (30) provides,
e
T
spiral
(n) =
(r−R
0
)(V
s
+V
T
)
V
T
V
s
−
2r(V
T
+V
s
λ)
V
T
V
s
(1−λ)
+
2r(N
n
−1)
V
T
−
V
T
+V
s
λ
V
s
+V
T
N
n
(V
s
+V
T
)(R
0
(λ−1)−r(λ+1))
V
T
V
s
(1−λ)
(31)
C. The End-game
Following the sweepers’ completion of sweep number
N
n
− 1, they progress in the direction of the center of the
evader region up to a position in which the inner tips of the
central parts of their sensors are positioned at the center of the
evader region. After this inward motion, the sweepers must
complete a set of maneuvers referred to as the end-game in
order to ensure detection of all smart evaders. A final circular
sweep around radius r is required to complete the detection of
all evaders and complete the search mission. Sweepers have
the ability to successfully detect all evaders during the last
circular sweep only if their speed is sufficiently high to ensure
that although they do not track the expanding wavefront of
the remaining evader region at this last sweep with a spiral
trajectory and perform a considerably less efficient circular
sweep, they are still able to catch all evaders. The reason why
this last motion cannot be a spiral out motion is because we
wish that the tips of the central part of the sweepers sensors
will always be positioned at the center of the evader region to
ensure that no evaders remain at the center of the region or
near its vicinity. Due to the fact that the critical speed for a
spiral sweep is lower compared to a critical speed of circular
trajectories, the sweepers can only implement the last circular
sweep after spiral sweep number N
n
− 1 if their speeds are
sufficiently high and satisfy the following inequality,
2r ≥ V
T
T
last
+ V
T
T
in
last
+ R
N
(32)
Satisfying (32) implies that detection of all evaders is guar-
anteed. Prior to the last sweep the evader region is within a
circle of radius R
N
such that 0 < R
N
≤ 2r. R
N
can be also
expressed as, R
N
= r (2 − ε). Hence, ε may be expressed as
ε =
2r−R
N
r
, 0 ≤ ε < 2. The final circular sweep takes place
once the sweepers progress to the region’s center and place
the lower tips of the central part of their sensors at the center
of the evader region. Hence, the last circular sweep is spans
an angle of
2π
n
− γ
i
around a region contained within a circle
of radius r around the center of the evader region. The time
required for sweepers to perform this motion is,
T
last
(n) =
2π
n
− 2α
r
V
s
(33)
Denote the smallest possible ε that satisfies (32) as ε
c
. To
perform the last circular sweep immediately following spiral
sweep number N
n
− 1, the inequality in (32) implies that
ε ≥ ε
c
=
2V
T
(π−n(α−1))
n(V
T
+V
s
)
. This consideration dictates that
implementation of a circular sweep immediately after spiral
sweep number N
n
− 1, V
s
is possible only if,
V
s
≥
2V
T
(π − n (α − 1)) − nε
c
V
T
nε
c
(34)
If R
N
≥ r (2 − ε
c
) or equivalently,
R
N
≥
2rn (V
T
+ V
s
) − 2V
T
r (π − n (α − 1))
n (V
T
+ V
s
)
(35)
Then the sweepers’ speed does not suffice to rule out the
possibility of a feasible escape trajectory for potential evaders.
Hence, if (35) holds or (34) does not, then the sweepers must
implement a final spiral sweep, that starts with the lower
tips of the central parts of their sensors at the center of the
evader region. This spiral sweep starts when the center of
each sweeper is at a distance of r from the center of the
region. Denote by T
l
(n) the time required to sweep it. Hence,
T
l
(n) equals T
l
(n) =
r(λ−1)
V
T
. Denote by η a characteristic
function that assumes only two possible values, 1 or 0. If the
additional spiral sweep has to be implemented than η = 1 and
consequently T
l
(n) is added to the total sweep time, otherwise
in case no additional spiral sweep is required η = 0. Hence,
T
l
(n) =
r (λ − 1)
V
T
(36)
T
spiral
(n) =
e
T
spiral
(n) + T
last
(n) + ηT
l
(n) (37)
Denote by T
in
f
(n) the sweepers inward advancement time
corresponding to the spread of evaders originating from the
center of the evader region at the beginning of the last spiral
sweep that had time of T
l
(n) to spread at a speed of V
T
.
Therefore, T
in
f
(n) is given by T
in
f
(n) =
T
l
(n)V
T
V
s
. T
in
(n),
the total inward advancement time therefore equals,
T
in
(n) =
e
T
in
(n) + T
in
last
(n) + ηT
in
f
(n) (38)
Or alternatively,
T
in
(n) =
e
T
in
(n) +
R
N
V
s
+
ηr (λ − 1)
V
s
(39)
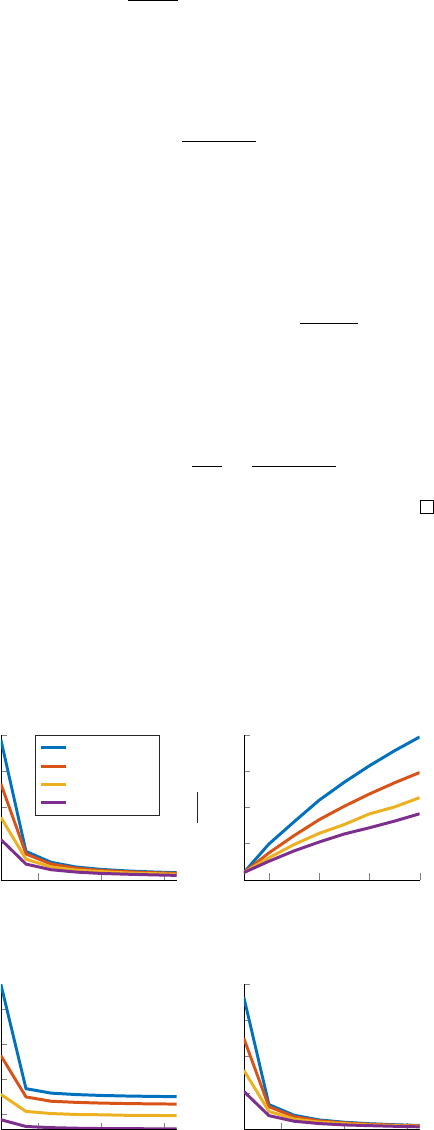
D. Experimental Results
Fig. 3 presents a numerical analysis of the total sweep times
required to detect all evaders in the region for different even
numbers of sweepers (2 to 16 sweepers). The total sweep times
are the sum of spiral sweep and inward advancement times.
5 10 15
0
500
1,000
1,500
2,000
Number of Agents
Time
Time of Complete Cleaning of
the Evader Region- α= 10
◦
∆V = 0.5V
T
∆V = 2V
T
∆V = 5V
T
∆V = 10V
T
2 4 6 8
0
5
10
15
20
Number of Agents * 2
T (2)
T (n)
Gain in Adding More
Sweepers- α= 10
◦
5 10 15
40
60
80
100
Number of Agents
Time
Total Inward Advancement
Times- α= 10
◦
5 10 15
0
500
1,000
1,500
2,000
Number of Agents
Time
Total Spiral Sweep
Times- α= 10
◦
Fig. 3. Sweep time until complete cleaning. The top left plot shows complete
cleaning times for different numbers of sweepers. The top right plot shows the
gain in search time reduction as a function of the number of sweepers. The
bottom left plot shows only the spiral sweep time component and the bottom
right plot shows only the inward advancement time component. The chosen
values of the parameters are: α = 10
◦
, r = 100, V
T
= 1 and R
0
= 1000.
V. CONCLUSIONS AND FUTURE RESEARCH DIRECTIONS
This research studies the problem of guaranteed detection of
smart mobile evaders by a team of sweeping agents equipped
with fan-shaped sensors that act as visual detectors. Evaders
are initially located inside a known circular environment that
does not have physical barriers that prevent evaders from
attempting to escape it. An algorithm that guarantees detection
of all evaders by using any even number of sweepers that
use pincer sweeps between searching pairs is developed and
analytically proven. Numerical and illustrative simulations
using MATLAB and NetLogo demonstrate the performance
of the proposed algorithm.
While in this work we focus on the rather simplistic circular
environment, the concept of spiral pincer movements based
on pairs of sweepers can be extended and generalized to
more complex environments with different geometric layouts.
Hence, a future research direction is to generalize the results
to environments with different geometries.
An additional future extension seeks to analyze critical
speeds and sweep times obtained for teams of sweepers with
fan-shaped sensors that employ same-direction sweeps. We ex-
pect such methods to result in degraded performance compared
to the pincer-based protocols developed in this work. Such
protocols will enable to precisely quantify the performance
improvement achieved with the developed pincer-based search
protocols compared to their same-direction alternatives.
REFERENCES
[1] M. Sandler, A. Howard, M. Zhu, A. Zhmoginov, and L.-C. Chen,
“Mobilenetv2: Inverted residuals and linear bottlenecks,” in Proceedings
of the IEEE conference on computer vision and pattern recognition,
2018, pp. 4510–4520.
[2] A. Bochkovskiy, C.-Y. Wang, and H.-Y. M. Liao, “Yolov4: Op-
timal speed and accuracy of object detection,” arXiv preprint
arXiv:2004.10934, 2020.
[3] B. O. Koopman, Search and screening: general principles with historical
applications. Oxford: Pergamon Press, 1980.
[4] P. Vincent and I. Rubin, “A framework and analysis for cooperative
search using uav swarms,” in Proceedings of the 2004 ACM symposium
on Applied computing. ACM, 2004, pp. 79–86.
[5] Y. Altshuler, V. Yanovsky, I. A. Wagner, and A. M. Bruckstein, “Efficient
cooperative search of smart targets using uav swarms,” Robotica, vol. 26,
no. 4, pp. 551–557, 2008.
[6] Y. Altshuler, V. Yanovski, I. A. Wagner, and A. M. Bruckstein, “Multi-
agent cooperative cleaning of expanding domains,” The International
Journal of Robotics Research, vol. 30, no. 8, pp. 1037–1071, 2011.
[7] A. Bressan, M. Burago, A. Friend, and J. Jou, “Blocking strategies for
a fire control problem,” Analysis and Applications, vol. 6, no. 03, pp.
229–246, 2008.
[8] A. Bressan and T. Wang, “On the optimal strategy for an isotropic block-
ing problem,” Calculus of Variations and partial differential equations,
vol. 45, no. 1-2, pp. 125–145, 2012.
[9] Z. Tang and U. Ozguner, “On non-escape search for a moving target by
multiple mobile sensor agents,” in 2006 American Control Conference.
IEEE, 2006, pp. 6–pp.
[10] T. G. McGee and J. K. Hedrick, “Guaranteed strategies to search for
mobile evaders in the plane,” in 2006 American Control Conference.
IEEE, 2006, pp. 6–pp.
[11] P. C. Hew, “Linear and concentric arc patrols against smart evaders,”
Military Operations Research, vol. 20, no. 3, pp. 39–48, 2015.
[12] D. Shishika and V. Kumar, “Local-game decomposition for multiplayer
perimeter-defense problem,” in 2018 IEEE Conference on Decision and
Control (CDC). IEEE, 2018, pp. 2093–2100.
[13] D. Shishika, J. Paulos, and V. Kumar, “Cooperative team strategies for
multi-player perimeter-defense games,” IEEE Robotics and Automation
Letters, vol. 5, no. 2, pp. 2738–2745, 2020.
[14] V. R. Makkapati and P. Tsiotras, “Optimal evading strategies and task
allocation in multi-player pursuit–evasion problems,” Dynamic Games
and Applications, vol. 9, no. 4, pp. 1168–1187, 2019.
[15] T. H. Chung, G. A. Hollinger, and V. Isler, “Search and pursuit-evasion
in mobile robotics,” Autonomous robots, vol. 31, no. 4, pp. 299–316,
2011.
[16] S. S. Kumkov, S. Le M
´
enec, and V. S. Patsko, “Zero-sum pursuit-evasion
differential games with many objects: survey of publications,” Dynamic
games and applications, vol. 7, no. 4, pp. 609–633, 2017.
[17] I. E. Weintraub, M. Pachter, and E. Garcia, “An introduction to pursuit-
evasion differential games,” in 2020 American Control Conference
(ACC). IEEE, 2020, pp. 1049–1066.
[18] E. Garcia, D. W. Casbeer, and M. Pachter, “Optimal strategies of the
differential game in a circular region,” IEEE Control Systems Letters,
vol. 4, no. 2, pp. 492–497, 2019.
[19] E. Garcia, D. W. Casbeer, A. Von Moll, and M. Pachter, “Multiple
pursuer multiple evader differential games,” IEEE Transactions on
Automatic Control, vol. 66, no. 5, pp. 2345–2350, 2020.
[20] R. M. Francos and A. M. Bruckstein, “Search for smart evaders with
swarms of sweeping agents,” IEEE Transactions on Robotics, vol. 38,
no. 2, pp. 1080–1100, 2021.
[21] R. Francos and A. Bruckstein, “Pincer-based vs. same-direction search
strategies after smart evaders by swarms of agents,” Proceedings of the
IEEE International Conference on Ubiquitous Robots; arXiv preprint
arXiv:2104.06940, 2023.
[22] S. Tisue and U. Wilensky, “Netlogo: A simple environment for modeling
complexity,” in International conference on complex systems, vol. 21.
Boston, MA, 2004, pp. 16–21.
[23] R. M. Francos and A. M. Bruckstein, “Search for smart evaders with
sweeping agents,” Robotica, pp. 1–36, 2021.
