Schram et al - 1
IMPLEMENTATION OF AUTONOMOUS EMERGENCY BRAKING (AEB), THE NEXT STEP IN
EURO NCAP’S SAFETY ASSESSMENT
Richard Schram
Aled Williams
Michiel van Ratingen
European New Car Assessment Programme,
Belgium
on behalf of the Euro NCAP P-NCAP Working Group
Paper Number: 13-0269
ABSTRACT
Euro NCAP has released its updated rating scheme
for 2013-2016 that outlines, amongst other
technologies, the implementation of Autonomous
Emergency Braking (AEB) technologies within the
overall rating scheme. Three types of AEB
technologies will be included in the rating scheme,
starting with low speed car-to-car AEB City and
higher speed car-to-car AEB Inter-Urban in 2014,
followed two years later by AEB Pedestrian.
In 2011 the Primary Safety Technical Working
Group (PNCAP TWG) started working on AEB
protocols, where Euro NCAP members have
contributed to the development of the Test and
Assessment protocols. They have been developed
in a relatively short time, by finding the
commonalities and discussing the differences
between different initiatives from industry, insurers
and others that were the main source of input to the
working group.
Recently, both AEB City and AEB Inter-Urban
protocols were finalized. The test protocol details a
series of tests, following an incremental speed
approach for systems with AEB and Forward
Collision Warning (FCW) functionality, and
specifies in detail the target vehicle to ensure the
highest level of reproducibility and repeatability.
The assessment protocols identify the scoring
principle and relative weight of each scenario for
inclusion in the overall rating scheme. This paper
describes both protocols.
BACKGROUND
In 2009, Euro NCAP introduced its new rating
scheme [1], which allows new technologies to be
implemented in the overall assessment of a new
vehicle. The new rating scheme consists of four
areas of assessment, also called boxes, which
together result in one overall rating. The four areas
of assessment are Adult Occupant Protection
(AOP), Child Occupant Protection (COP),
Pedestrian Protection (PP) and Safety Assist (SA).
With the introduction of the new rating scheme,
Euro NCAP also released a roadmap for the years
2010-2015 [2] where the implementation of AEB
technologies was outlined. Low speed AEB
systems, AEB City, were directly linked to
whiplash prevention and therefore added to the
AOP box. It is noted that AEB City systems
primarily avoid or mitigate whiplash injuries in the
opponent vehicle and are seen as partner protection
systems. Euro NCAP deliberately does not make a
distinction between self or partner protection when
appointing technologies to a certain box.
With regards to high speed AEB Inter-Urban
systems, these are included in the SA box as their
benefits are broad and are not directly related to
any of the tests performed in the other boxes.
Euro NCAP Advanced
By opening the rating scheme for new
technologies, Euro NCAP also introduced an award
system called Euro NCAP Advanced to be able to
promote new important technologies, explain their
safety potential and learn how they are evaluated
by the carmakers themselves. Amongst other
technologies, AEB systems from several
manufacturers were put forward to achieve such a
Euro NCAP Advanced reward. The accident
analyses carried out to support their applications
suggest that AEB systems could reduce rear end
crashes by more than 25%.
AEB Survey
Although the expected benefit of AEB technology
is significant, the functionality and availability of
AEB in Europe is far from standardized. In 2012,
Euro NCAP carried out a survey on the current (per
model) market availability of AEB systems within
the EU-27. The survey revealed that AEB is still
not offered on 79% of the car models on sale in
Europe and that 66% of manufacturers do not offer
an AEB system on any of their new car models.
The survey showed that information on AEB was
generally hard to find at manufacturers websites
and that there was no consistency in naming
between brands. The equipment that was offered
was mostly optional, even though there were
encouraging signs of serial fitment of AEB City
technology on small class cars in particular.
Schram et al - 2
Detailed results can be found on the Euro NCAP
website [3].
WORKING GROUP
As for all Euro NCAP protocols, the development
was done within a collaborative Working Group.
For AEB, the P-NCAP TWG was given the task to
deliver a test and assessment procedure by the end
of 2012, for implementation in 2014. Although car
makers and suppliers were not directly involved in
the working group, several meetings were
organised between representatives of both sides to
discuss the procedures. More importantly, the work
of the group took advantage of and brought
together the results delivered by several main
initiatives in Europe that where looking into the
development of AEB test and assessment
procedures.
Initiatives
Within Europe, four main initiatives were running
in parallel, all with the same goal of developing test
procedures for assessing AEB and FCW systems:
ADAC, AEB, ASSESS and vFSS.
The German automobile club ADAC, one of the
Euro NCAP’s member organisations, had
developed an inflatable vehicle target to be able to
perform a Comparative test of advanced emergency
braking systems on high end vehicles [4] with
support from automotive first-tier suppliers
Continental and Bosch. Their first test series using
the target concluded that any of the advanced
emergency braking systems tested were capable of
significantly reducing the severity of rear-end
collisions.
The RCAR Autonomous Emergency Braking
group [5], led by Thatcham has the aim of
designing and implementing a testing and rating
procedure for Autonomous Emergency Braking
(AEB) systems reflecting real world accident data.
It is hoped that this will encourage the development
of AEB systems that can avoid or mitigate the
effects of car-to-pedestrian and car-to-car collisions
seen in the most common crash types. The group
mainly consisted of insurance institutes, supported
by Volvo Car Corporation and first-tier supplier
Continental.
The European Commission sponsored project
ASSESS (Assessment of Integrated Vehicle Safety
Systems for improved vehicle safety) led by
Humanetics Innovative Systems had specific
project goals to develop harmonized and
standardized assessment procedures and related
tools for selected integrated safety systems [6]. The
project partners consisted of nine research
institutes, four of which were Euro NCAP
laboratories: BASt, IDIADA, TNO and TRL. From
industry side, Daimler, PSA and Toyota
participated as car manufacturers and Bosch and
TRW as first-tier suppliers.
The fourth initiative was vFSS (Advanced
Forward-Looking Safety Systems), a German
partnership led by DEKRA, in which all German
vehicle manufacturers were represented (Audi,
BMW, Daimler, Porsche and VW) along with Ford,
Opel, Honda and Toyota [7]. Other project partners
were insurance institutes Allianz and GDV and the
research institute BASt. The aim of the vFSS
project was in line with the other initiatives: the
development of test procedures for driver
assistance systems (in particular advanced
emergency braking systems) in order to ensure a
robust assessment of such systems.
The outcome and deliverables of all the initiatives
were extensively discussed within the working
group and formed the basis for the decision on test
scenarios and target used.
TEST SCENARIOS AND TARGET
Within the different initiatives, there was a large
overlap of the proposed test scenarios, based on an
extensive analysis of real world rear-end crashes.
Overlaying the proposed test scenarios, the P-
NCAP TWG agreed to the following test scenarios
for AEB City and AEB Inter-Urban:
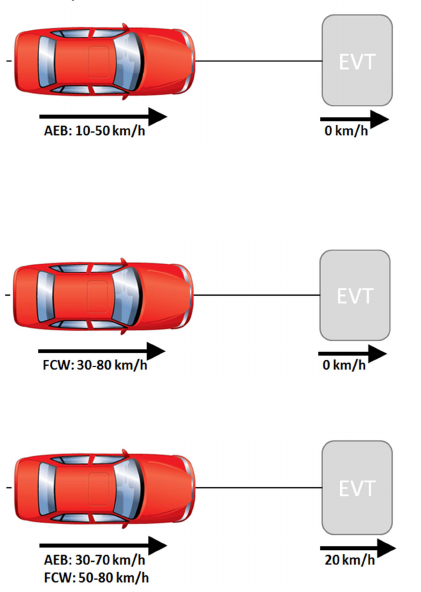
AEB City
Figure 1. AEB City scenario, CCRs
AEB Inter-Urban
Figure 2. AEB Inter-Urban scenario, CCRs
Figure 3. AEB Inter-Urban scenario, CCRm
Schram et al - 3
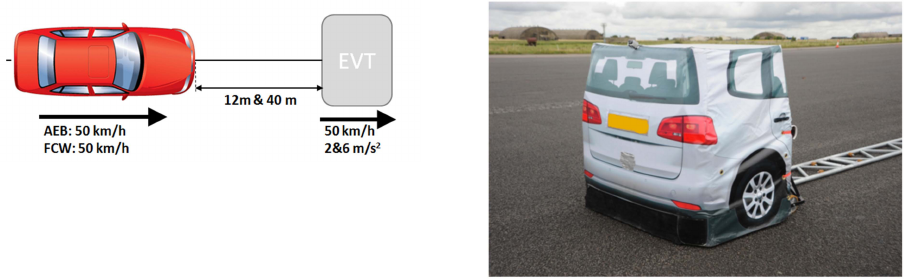
Figure 4. AEB Inter-Urban scenario, CCRb
For the AEB Inter-Urban scenarios CCRm and
CCRb, the FCW function tests are performed in
case there is no complete avoidance by the AEB
function. For the CCRs scenarios, there is no AEB
function assessment.
FCW functionality is assessed by reacting to the
warning that is issued after an imminent collision
has been detected. A brake robot will apply the
brakes 1.2s after the warning starts to simulate
driver reaction time.
Incremental Speed Approach
The range of speeds shown in the figures above
will be tested in an incremental approach. Starting
at a very low speed, the approach speed of the
Vehicle Under Test (VUT) is stepwise increased by
10 km/h while impact with the Euro NCAP Vehicle
Target (EVT) is fully avoided. When there is first
contact between the VUT and the EVT, an
additional test is performed at a speed 5 km/h lower
and testing continues with 5 km/h increments until
the speed reduction achieved of the VUT is less
than 5 km/h.
Euro NCAP Vehicle Target
Different types of target were studied within the
aforementioned initiatives but also by the vehicle
manufacturers for in-house evaluation. A number
of the most promising targets were evaluated at a
number of vFSS events to verify their ability to be
seen by different types of sensors and their
robustness. It was concluded that the ADAC
inflatable target was the preferred target for the
moment, based on its sensitivity to current
generation Radar, LIDAR, camera and PMD
sensors. The details of the target are presented by
ADAC in separate paper [8]. Euro NCAP adopted
this target for its first phase of testing. For this
purpose, it has a new cover that matches a real car
and was subsequently referred to as the Euro
NCAP Vehicle Target.
Figure 5. Euro NCAP Vehicle Target (EVT)
Test equipment and test track
Euro NCAP uses different laboratories for all of its
tests. To ensure repeatable and reproducible results
now and in the future, the WG decided to set strict
tolerances for testing AEB systems, even though it
was acknowledged that this may not always be
necessary to evaluate the performance of these
systems in the scenarios described earlier. The
tolerances used are listed below:
- Speed of VUT + 1.0 km/h
- Speed of EVT + 1.0 km/h
- Lateral deviation 0 ± 0.1 m
- Relative distance (CCRb) 0 ± 0.5m
- Yaw velocity 0 ± 1.0 °/s
- Steering wheel velocity 0 ± 15.0 °/s
Due to these strict tolerances, all of the Euro NCAP
laboratories will use both steering and brake robots
to control the vehicle during test. Details on the test
execution and the equipment used can be found in a
paper by Thatcham, one of the Euro NCAP’s test
laboratories [9].
Another, less controllable, influencing factor is
weather condition. The tracks used for the
assessment are spread over Europe with different
climates. Although the weather may influence the
performance of the systems, it is thought that in
day-to-day use these systems also encounter
various weather conditions. However, limits are set
to temperature (between 5 and 40°C) and wind
(below 10 m/s). There may be no precipitation
falling and horizontal visibility at ground level
must be greater than 1km. Finally, the natural
ambient illumination must be homogenous in the
test area and in excess of 2000 lux for daylight
testing with no strong shadows cast across the test
area other than those caused by the VUT or EVT. It
is also ensured that testing is not performed driving
towards or away from the sun when there is direct
sunlight.
ASSESSMENT
The assessment of AEB systems includes three
different functionalities: the Autonomous
Schram et al - 4
Emergency Braking function, the Forward
Collision Warning function and the Human
Machine Interface. For AEB City systems, the
FCW function is not taken into account as, for low
speeds, warning is not considered effective.
The assessment protocol is able to cope with AEB
systems that have AEB (auto-brake) or FCW
(warning only) functionality only or a combination
of both functionalities. AEB only and AEB/FCW
combined systems are able to score full points,
whereas FCW only systems can only score the
points available for FCW and HMI.
Assessment Criteria
For both the AEB and FCW functionality, the only
assessment criterion used is the impact speed
reduction. For each run into the target at
incremental speed, a full score is given when the
target is completely avoided. Where contact occurs,
the points are awarded on a sliding scale basis,
where the proportion of speed reduction based on
the relative test speed determines the proportion of
available points scored, until the speed reduction
achieved is less than 5 km/h and testing stops.
Score = [(v
rel test
– v
rel impact
)/v
rel_test
] x points
test
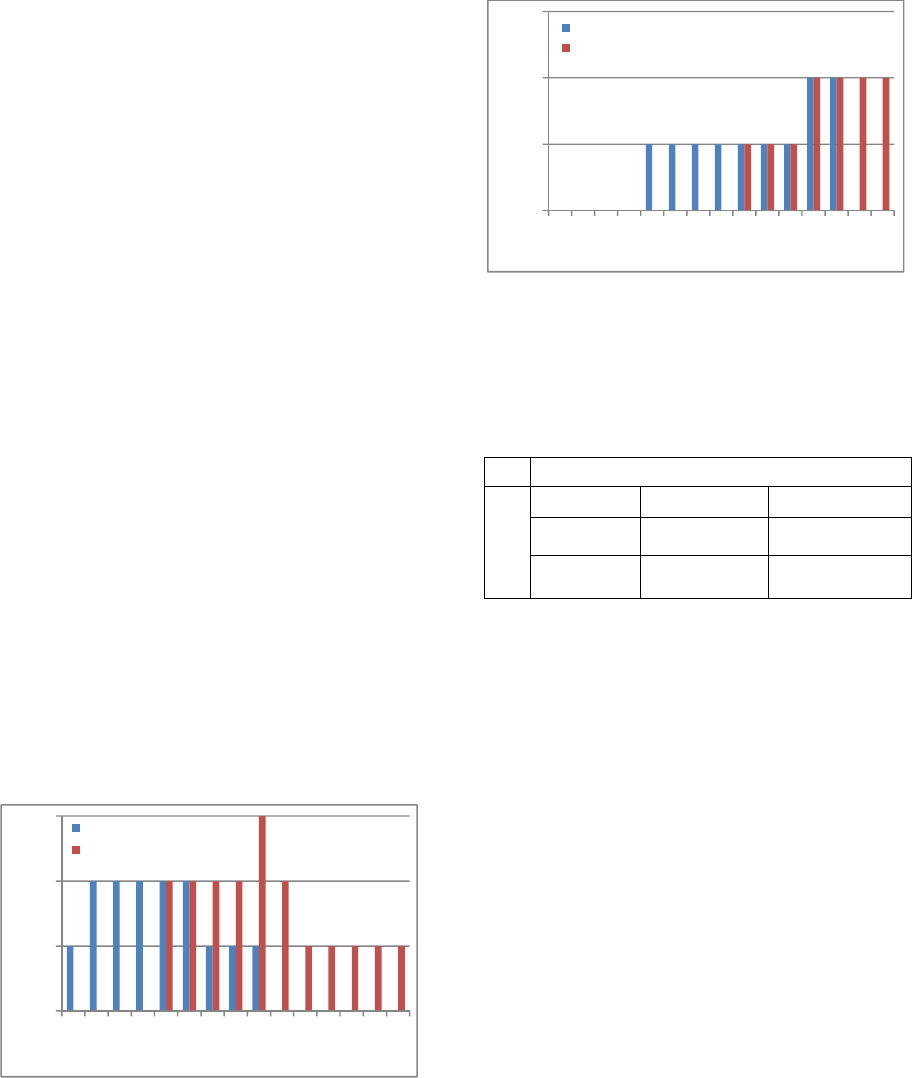
The number of points available for the different test
speeds is based on accident frequency, where the
most frequent speed crashes are given more weight
than others. The available point distributions for
FCW and AEB for the CCRs and CCRm scenarios
respectively are shown in the figures below. The
point distribution is based on GIDAS accident data.
Figure 6. Maximum points per CCRs test speed for
AEB (City) and FCW (Inter-Urban)
Figure 7. Maximum points per CCRm test speed
for AEB (Inter-Urban) and FCW (Inter-Urban)
The points available for the CCRb scenarios for
both AEB and FCW functionality are as follows:
Table 1
Available points for CCRb scenarios
EVT deceleration level
Headway
2.0 m/s
2
6.0 m/s
2
12 m
1.00 1.00
40 m
1.00 1.00
Human Machine Interface
The effectiveness of the whole AEB system, both
AEB and FCW functionality, highly depends on the
HMI of the warning and the ON/OFF rate of the
system, especially for the FCW functionality. At
this moment, Euro NCAP has not defined
qualitative criteria for warning due to the limited
knowledge available on this subject. However,
some points are awarded to systems that encourage
use and offer supplementary warnings.
AEB City
To be eligible for assessment, the AEB City system
needs to be fitted as standard to all vehicle models
sold within the EU-27. Additionally, the system
needs to completely avoid the impact up to 20
km/h.
As for AEB City, only the autonomous emergency
braking functionality is considered.HMI points will
only be awarded if the AEB system is default ON
at the start of every journey. When this condition is
met, points are awarded for the ON/OFF switch
when this is more sophisticated than a simple “push
on a button”, e.g. hold button for several seconds,
hence discouraging easy disconnection at each
journey.
AEB Inter-Urban
The fitment rate requirement for AEB Inter-Urban
systems to be eligible for assessment is less
stringent than for AEB City. In the first two years
50% of all sales of a vehicle model should have the
0.00
1.00
2.00
3.00
10 15 20 25 30 35 40 45 50 55 60 65 70 75 80
Test Speed [km/h]
AEB (AEB City)
FCW (AEB Inter-Urban)
0
1
2
3
10 15 20 25 30 35 40 45 50 55 60 65 70 75 80
Test Speed [km/h]
AEB
FCW
Schram et al - 5
system fitted. In 2016 this should be 70%, and in
2017 the AEB Inter-Urban system has to be
standard fit.
In AEB Inter-Urban, the AEB and FCW
functionality needs to be default ON at the start of
every journey, when available. In addition, the
forward collision warning must be loud and clear to
the driver. When the above conditions are met,
HMI points can be scored for the following items:
- Activation/deactivation of AEB and/or FCW
Needs to be more sophisticated than just
pushing a button once
- Supplementary warning for FCW. In addition
to the required audiovisual warning, a more
sophisticated warning like head-up display,
belt jerk, brake jerk or any other haptic
warning is available.
- Reversible pretensioning of belt. When the
system detects a critical situation that can
possibly lead to a crash, the belt can already be
pre-tensioned to prepare for the oncoming
crash.
Total Score
For the total score of AEB City and AEB Inter-
Urban, the normalized sub-scores (as a percentage
of the maximum points available) of HMI, AEB
and FCW functionality weighted and summed.
For AEB City:
Score = (AEB x 2.5) + (HMI x 0.5)
For AEB Inter-Urban:
Score = (AEB x 1.5) + (FCW x 1.0) + (HMI x 0.5)
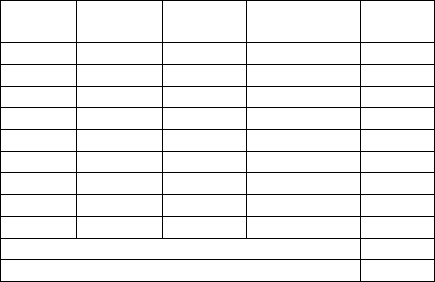
Scoring example for an AEB Inter-Urban system:
Table 2
Example of AEB function test results in CCRm
scenario
Vtest
[km/h]
Vrel test
[km/h]
Vimpact
[km/h]
Vrel impact
[km/h]
Score
30 10 0 0 1.000
35 15 0 0 1.000
40 20 0 0 1.000
45 25 0 0 1.000
50 30 30 10 0.667
55 35 45 25 0.286
60 40 55 35 0.125
65 45 - - 0.000
70 50 - - 0.000
Total 5.078
Normalised 46.2%
AEB function in CCRb scenario: 67.5%
AEB score = average(CCRm,CCRb)
= 56.9%
FCW function (assumed normalized scores for this
example)
- CCRs scenario: 84.7%
- CCRm scenario: 76.4%
- CCRb scenario: 100.0%
FCW score = average(CCRs,CCRm,CCRb)
= 87.0%
HMI score:
Prerequisites not met. System can be switched OFF
with a single push on a button.
AEB Inter-Urban total score:
(AEB x 1.5) + (FCW x 1.0) + (HMI x 0.5)
56.9% x1.5 + 87.0% x1.0 + 0% x0.5 = 1.724 points
Finally, the AEB scores are included in the overall
rating for the vehicle. The AEB City scores are
awarded in the Adult Occupant Protection box and
the AEB Inter-Urban scores are awarded in the
Safety Assist box.
DISCUSSION
With the introduction of a relatively simple test to
assess advanced systems like AEB, Euro NCAP
wants to push the introduction of these systems into
the market. From the start of the development of
the protocols, it was clear that there would be a
revision of the protocol within a couple of years.
The target used during the tests represents only half
a car’s length and can only be used in non-offset
car-to-car rear scenarios. In addition, the target is
relatively easy to identify and can be seen as an
overrepresentation, especially for radar systems. As
sensor systems get more advanced, the target
should align better with the vehicle it is
representing.
For the moment, only rear end impacts are
included, where it is foreseen that systems will
advance rapidly and more scenarios can be added,
which can be more challenging in the next phase.
The requirements for HMI are very basic and these
requirements will be reviewed in the next years
when a number of systems are assessed and best
practice is identified.
All in all, Euro NCAP will continue to develop the
requirements for AEB technologies to keep up with
the development of these technologies and to
ensure high quality systems for consumers.
CONCLUSIONS
In 2014 Euro NCAP will start assessing both AEB
City and AEB Inter-Urban systems, which are
taken into account in the Adult Occupant
Protection and Safety Assist boxes respectively.
The assessment is based on three functionalities;
AEB, FCW and HMI.
The working group will continue to develop
protocols for AEB pedestrian and an extension of
the AEB City and Inter-Urban protocols.
Schram et al - 6
ACKNOWLEDGEMENT
The P-NCAP working group was able to deliver the
test and assessment protocols in time for
implementation in 2014 due to all the hard work
done within and outside of the working group.
P-NCAP WG members
ADAC, BASt, DEKRA, Department for Transport
(DfT), IDIADA, NL-MOT/RDW, Swedish
Transport Administration (STA), Thatcham, TNO
and UTAC
Euro NCAP wants to thank the OEMs and
suppliers for their support and feedback on the
protocols and all the members of the P-NCAP WG
for all effort and resources they put into the
development and verification of these protocols.
REFERENCES
[1] Euro NCAP Rating Review, 2012 version 2.1.
http://www.euroncap.com/Content-Web-
Page/c6f9d381-1889-4c66-bfcd-
c5c0a69a364d/technical-papers.aspx
[2] Euro NCAP 2010-2015 Strategic Roadmap,
2009. http://www.euroncap.com/Content-Web-
Page/c6f9d381-1889-4c66-bfcd-
c5c0a69a364d/technical-papers.aspx
[3] AEB Fitment Survey 2012.
http://www.euroncap.com/results/aeb/survey.aspx
[4]
Comparative test of advanced emergency
braking systems, ADAC.
http://www.activetest.eu/pdf/adac_aebs_report_en.
pdf
[5]
Autonomous Emergency Braking (AEB)
Test Definition Group, Thatcham.
http://www.thatcham.org/safety/pdfs/AEB_group_
paper_Jun2010.pdf
[6]ASSESS
http://www.assess-project.eu/site/en/about.php
[7]vFSS www.vfss.net
[8] Development of a test target for AEB systems,
Volker Sandner, ADAC. Proceedings of the 23rd
International Technical Conference on the
Enhanced Safety of Vehicles (Paper 0406), Seoul,
May 2013.
[9] Development of Autonomous Emergency
Braking (AEB) Test Procedures, Alix Weekes,
Colin Grover, Matthew Avery, Iain Knight.
Thatcham MIRRC, United Kingdom. Proceedings
of the 23rd International Technical Conference on
the Enhanced Safety of Vehicles (Paper 0024),
Seoul, May 2013.
