
Graver Bases via Quantum Annealing
with application to non-linear integer programs
Hedayat Alghassi
∗
, Raouf Dridi
†
, Sridhar Tayur
‡
CMU Quantum Computing Group
Tepper School of Business, Carnegie Mellon University, Pittsburgh, PA 15213
February 13, 2019
Abstract
We propose a novel hybrid quantum-classical approach to calculate Graver bases,
which have the potential to solve a variety of hard linear and non-linear integer pro-
grams, as they form a test set (optimality certificate) with very appealing properties.
The calculation of Graver bases is exponentially hard (in general) on classical com-
puters, so they not used for solving practical problems on commercial solvers. With
a quantum annealer, however, it may be a viable approach to use them. We test two
hybrid quantum-classical algorithms (on D-Wave)–one for computing Graver basis and
a second for optimizing non-linear integer programs that utilize Graver bases–to under-
stand the strengths and limitations of the practical quantum annealers available today.
Our experiments suggest that with a modest increase in coupler precision–along with
near-term improvements in the number of qubits and connectivity (density of hardware
graph) that are expected–the ability to outperform classical best-in-class algorithms is
within reach, with respect to non-linear integer optimization.
Keywords: Graver bases, quantum annealing, test sets, non-linear integer optimization,
computational testing.
∗
halghassi@cmu.edu
†
[email protected]u.edu
‡
stayur@cmu.edu
1
arXiv:1902.04215v1 [quant-ph] 12 Feb 2019
Contents
1 Introduction 4
1.1 Illustrative Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Features and Contributions of our Approach . . . . . . . . . . . . . . . . . . 5
1.2.1 Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.2 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Background: Graver Bases and its Use in Non-linear Integer Optimization 7
2.1 Mathematics of Graver Bases . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 Wide Applicability of Graver Bases as Optimality Certificates . . . . . . . . 9
3 Graver Basis via Quantum Annealing 10
3.1 QUBOs for Kernels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1.1 Integer to binary encoding . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1.2 Sampling the kernel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2 Post-Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2.1 Systematic post-processing of near-optimal solutions into optimal . . 13
3.2.2 Distribution of optimal and near-optimal solutions: Experimental results 14
3.2.3 Combining near-optimal solutions . . . . . . . . . . . . . . . . . . . . 14
3.3 Using Residual Kernel to Obtain More Graver Bases Elements . . . . . . . . 16
3.4 Adaptive Centering and Encoding . . . . . . . . . . . . . . . . . . . . . . . . 16
3.5 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.5.1 Example 1: Four coin problem . . . . . . . . . . . . . . . . . . . . . . 17
3.5.2 Example 2: Variation problem . . . . . . . . . . . . . . . . . . . . . . 18
3.5.3 Example 3: Snake-wise prime number . . . . . . . . . . . . . . . . . . 18
3.5.4 Example 4: Some random matrices of size (2 × 5) . . . . . . . . . . . 19
3.5.5 Example 5: Four cycle binary model . . . . . . . . . . . . . . . . . . 19
3.5.6 Example 6: Random low span integer matrices of size (4×8) . . . . . 20
3.6 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.6.1 Chainbreak . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.6.2 Communication delays . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4 Hybrid Quantum Classical Algorithm for Non-Linear Integer Optimiza-
tion 22
4.1 Algorithm Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.2 QUBO for Obtaining Feasible Solutions . . . . . . . . . . . . . . . . . . . . . 23
4.3 Parallel Augmentations with Limited Elements of the Graver Bases . . . . . 23
4.4 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.4.1 Case 1: Nonlinear 0-1 program with 50 binary variables . . . . . . . . 24
4.4.2 Comparison with a best-in-class classical method . . . . . . . . . . . 27
4.4.3 Case 2: Nonlinear low span integer program with 25 integer variables 28
2
4.4.4 Augmenting with partial Graver basis . . . . . . . . . . . . . . . . . . 30
5 Conclusions 32
Acknowledgements 32
Bibliography 32
A Graver Basis via Classical Methods 36
B Quantum Annealing and D-Wave Processors 37
B.1 Quantum Annealing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
B.2 Quantum Annealer from D-Wave . . . . . . . . . . . . . . . . . . . . . . . . 37
B.2.1 D-Wave SAPI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
B.2.2 Chainbreak strategy . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
B.2.3 Annealing time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3
1 Introduction
This paper explores the capability of an available quantum annealer for solving non-linear
integer optimization problems (that arise in engineering and business applications) using test
sets. Of course, we do not expect current quantum annealers (D-Wave 2000Q, in our setting)
to be competitive against classical computing algorithms that have decades of innovations
and implementation improvements. Our motivation in this work is more of a proof-of-
concept: to check how viable a hybrid quantum-classical approach is and understand what
it would take to surpass classical methods.
The D-Wave quantum annealer solves Quadratic Unconstrained Binary Optimization (QUBO)
problems of the form [Ber18]:
min x
T
Qx such that x ∈ {0, 1}
n
.
(1)
In this paper, we develop a hybrid quantum-classical algorithm that calculates a test set
called Graver bases, on such a quantum annealer, and then we use it to optimize nonlinear
integer programming problems. Because Graver bases [Gra75] have applications in areas
other than optimization, studying how our algorithm acquires Graver bases of integer ma-
trices of various kinds is of interest in itself. We test our approach on D-Wave and report
our findings.
1.1 Illustrative Example
The following example walks through some of the key steps of our algorithms (and reviews
the definition of Graver bases). Those steps will be described in detail in later sections.
Consider the following integer optimization problem with a non-linear objective function:
min f(x) =
4
P
i=1
|x
i
− 5|
, x
i
> 0 , x
i
∈ Z
1 1 1 1
1 5 10 25
x
1
x
2
x
3
x
4
=
21
156
Let A denote the 2× 4 integer matrix above; so we write the above constraint as Ax = b. By
definition, the Graver basis G(A) of the matrix A is a minimal set of elements of the kernel
ker
Z
A with respect to the partial ordering
x v y when x
i
y
i
> 0 (the two vectors x and y lie on the same orthant) and |x
i
| 6 |y
i
| .
The steps of our hybrid quantum-classical algorithm for computing Graver bases are:
• We map the problem of finding the kernel of A into a QUBO of the form (1). This is
the quantum part of the hybrid approach.
4
• The elements of G(A) can be obtained from the degenerate solutions of the given
QUBO. The way such elements are obtained (filtered from kernel elements, followed
by some post-processing) constitutes the classical part of our hybrid approach.
In our example, the Graver basis elements are the column vectors of the matrix:
G(A) =
0 5 5 5 5
3 −9 −6 −3 0
−4 4 0 −4 −8
1 0 1 2 3
=
g
1
g
2
g
3
g
4
g
5
This was obtained using only one call to the D-Wave quantum annealer (details in 3.5.1) and
some classical post-processing. (Typically, more than one call is required. We detail this in
a later section.) Once the Graver basis is computed, the optimal solution can be obtained
by augmenting, beginning from any feasible solution. To solve the optimization problem,
our second hybrid quantum-classical algorithm is as follows:
• We use the quantum annealer (once more) to solve the constraint Ax = b (using
QUBO in Equation (11)) and obtain a feasible solution. (Actually, a call of D-Wave
usually gives many solutions, up to 10000. We discuss how many of these are unique,
sometimes more than 6000, and which one(s)to use, in later subsections).
• With the Graver basis and a feasible solution at hand, we can start the augmentation
procedure (which is classical portion of our second algorithm).
Let us illustrate the augmentation step. An initial feasible solution obtained is x
0
=
1 15 3 2
T
with f(x
0
) = 19. Adding the vector −g
1
=
0 −3 4 −1
T
to the
previous value gives x
1
=
1 12 7 1
T
, which has a lower cost value of f(x
1
) = 17.
Similarly, adding g
2
=
5 −9 4 0
T
to the previous value yields x
2
=
6 3 11 1
T
,
which has a lower cost value of f(x
2
) = 13. Similar calculations are done consecutively with
the vectors g
5
, −g
3
and −g
1
again, which finally results in x
5
=
6 6 7 2
T
, which has
the cost value f(x
5
) = 7. Adding any of the Graver basis elements again to x
5
results in vec-
tors that all have a cost higher than the current minimum 7 (inside the feasible region x > 0);
therefore, the augmentation procedure stops with the optimal solution x
∗
= x
5
.
While the objective function can be linearized, it would require increasing the number of
variables, an important consideration when we have limited number of qubits and connec-
tivity. Furthermore, other non-linear objective functions that may not be easily linearizable
can also be handled with the same Graver basis and feasible solutions, making our procedure
more general purpose.
1.2 Features and Contributions of our Approach
We list below some key features followed by key contributions of our approach.
5
1.2.1 Features
• Graver basis is an optimality certificate, and the calculation of elements depends only
on the constraints. Thus, the objective function can even be a comparison oracle. The
objective function appears only in the augmentation step where it is called (queried).
Several different objective functions (for the same constraints) can be studied classically
once the Graver basis has been computed.
• In the special case of a quadratic objective function, a naive approach of combining the
objective function and the constraints through a Lagrangian multiplier into a single
QUBO may appear attractive. However, searching for the right Lagrangian multiplier
is non-trivial. We avoid this complexity in our approach as we have decoupled the
objective function from the constraints.
• In the case of an objective function that is a polynomial function, there is no need for
any reduction to QUBO and adding extra variables, different from other methods that
utilize a quantum annealer.
• At each anneal (read), the algorithm starts out fresh from the uniform superposition
(superposition of the states of the computational basis of C
2
⊗n
). A single call can have
up to 10000 reads. Thus, it can reach different ground states with good probabilities
(i.e., be able to extract different kernel elements, ker
Z
(A) ⊂ Z
n
2
,), and so within a few
calls, we can expect to find all of them.
1.2.2 Contributions
• We provide two hybrid quantum classical algorithms: (1) to calculate the Graver basis
of any general integer matrix, and (2) to solve a non-linear integer programming prob-
lem using the Graver basis. By separating the objective function and the constraints
equation’s (Ax = b) right hand side (b) from the calculation of the test set (Graver
basis), our approach can tackle many non-linear objectives, cost functions, only via
an oracle call, and also help in solving deterministic and stochastic programs (with
varying right hand sides b or objective function parameters) in a systematic manner.
• For the Graver calculation algorithm, we develop a (classical) systematic post-processing
strategy that transforms the quantum annealer’s near-optimal solutions into optimal
solutions, which might be an useful technique in other situations.
• For iterative integer to binary transformation in these algorithms, we develop an adap-
tive strategy that moves (a) the middle point and (b) the encoding length of integer
variables based on the suboptimal solutions obtained in the previous iteration. This
strategy, which optimizes resources (qubits), can be used in any integer to binary
encoding that is solved iteratively by a quantum annealer.
6
• We test both Graver and non-linear optimization algorithms, on the D-Wave 2000Q
quantum annealing processor and discuss the implementation details, strengths, and
shortcomings.
• Unlike the typical application of a quantum annealer that uses the many reads to
increase the confidence of a desired solution, we use the many reads to sample the
many unique solutions. This re-purposing makes our approach particularly suitable to
tackle hard integer optimization problems.
• Our experiments were designed to elucidate what is preventing the quantum annealer
from being competitive today, and what enhancements are needed (and why) to sur-
pass classical methods. What we find is that even if we have a processor with the
same number of qubits and connectivity structure, with a higher coupler precision,
some classes of nonlinear integer problems can be solved comparably to best-in-class
classical solvers, e.g., Gurobi Optimizer (latest version, 8.0). Alternatively, with a new
processor with a higher number of qubits and better connectivity that has already
been announced, even without an increase in coupler precision, certain instances can
be solved better than classical methods. Indeed, doubling the coupler precision (on
top of the announced increases in qubits and connectivity) would lead to surpassing
classical methods for many problems of practical importance.
1.3 Outline
We are bringing together (a) the calculation of Graver bases using quantum annealing
and (b) solving integer optimization through Graver bases with feasible solutions obtained
via quantum annealing. Section 2 introduces nonlinear integer programs and Graver bases.
A pre-requisite to acquiring the Graver basis is to find the kernel of a matrix. Section 3
develops a hybrid quantum classical algorithm for calculation of Graver basis of an inte-
ger matrix and presents computational results. Section 4 develops the quantum classical
algorithm for non-linear integer programs and presents numerical results. Section 5 summa-
rizes our findings. To make this document self-contained, our appendices briefly review (A)
computing Graver bases classically and (B) quantum annealing with D-Wave processors.
2 Background: Graver Bases and its Use in Non-linear
Integer Optimization
Let f : R
n
→ R be a real-valued function. We want to solve the general non-linear integer
optimization problem:
(IP)
A,b,l,u,f
:
min f(x),
Ax = b, l 6 x 6 u, x, l, u ∈ Z
n
A ∈ Z
m×n
, b ∈ Z
m
(2)
7

One approach to solving such problem is to use an augmentation procedure: start from an
initial feasible solution (which itself can be hard to find) and take an improvement step–
augmentation - until one reaches the optimal solution. Augmentation procedures such as
these need test sets or optimality certificates: so it either declares the optimality of the
current feasible solution or provides direction(s) towards better solution(s). Note that it
does not matter from which feasible solution one begins, nor the sequence of improving steps
taken: the final stop is an optimal solution. (It is not hard to see that computing a test
set can be very expensive classically. We want to study whether quantum annealing can be
competitive.)
Definition 1. A set S ∈ Z
n
is called a test set or optimality certificate if for every non-
optimal but feasible solution x
0
there exists t ∈ S and λ ∈ Z
+
such that x
0
+ λt is feasible
and f (x
0
+ λt) < f (x
0
). The vector t (or λt) is called the improving or augmenting direction.
If the optimality certificate is given, any initial feasible solution x
0
can be augmented to
the optimal solution. If S is finite, one can enumerate over all t ∈ S and check if it is aug-
menting (improving). If S is not practically finite, or if all elements t ∈ S are not available
in advance, it is still practically enough to find a subset of S that is feasible and augmenting.
Figure 1: Augmenting from initial to optimal solution [Onn10].
In the next section, we discuss the Graver basis of an integer matrix A ∈ Z
m×n
which is
known to be an optimality certificate.
2.1 Mathematics of Graver Bases
First, on the set R
n
, we define the following partial order:
Definition 2. Let x, y ∈ R
n
. We say x is conformal to y, written x v y, when x
i
y
i
> 0 (x
and y lie on the same orthant) and |x
i
| 6 |y
i
| for i = 1, ..., n. Additionally, a sum u =
P
i
v
i
is called conformal, if v
i
v u for all i (u majorizes all v
i
).
8
Suppose A is a matrix in Z
m×n
. Define :
L
∗
(A) =
x
Ax = 0, x ∈ Z
n
, A ∈ Z
m×n
\ {0} . (3)
The notion of Graver basis was first introduced in [Gra75] for integer linear programs (ILP):
Definition 3. The Graver basis of integer matrix A is defined to be the finite set of v
minimal elements (indecomposable elements) in the lattice L
∗
(A). We denote by G(A) ⊂ Z
n
the Graver basis of A.
The following proposition summarizes the properties of Graver bases that are relevant to our
setting.
Proposition 1. The following statements are true:
(i) Every vector x in the lattice L
∗
(A) is a conformal sum of the Graver basis elements.
(ii) Every vector x in the lattice L
∗
(A) can be written as x =
t
P
i=1
λ
i
g
i
for some λ
i
∈ Z
+
and
g
i
∈ G(A). The upper bound on number of Graver basis elements required (t) (called
integer Caratheodory number) is (2n − 2).
(iii) A Graver basis is a test set (optimality certificate) for ILP. That is a point x
∗
is optimal
for the optimization problem (IP )
A,b,l,u,f
, if and only if there are no g
i
∈ G(A) such
that x
∗
+ g
i
is better than x
∗
.
(iv) For any g ∈ G(A), an upper bound on the norm of Graver basis elements is given by
kgk
∞
6 (n − r) ∆ (A) and kgk
1
6 (n − r) (r + 1) ∆ (A) (4)
where r = rank(A) 6 m and ∆ (A) is the maximum absolute value of the determinant
of a square submatrix of A.
2.2 Wide Applicability of Graver Bases as Optimality Certificates
Beyond integer linear programs (ILP) with a fixed integer matrix, Graver bases as optimality
certificates have now been generalized to include several nonlinear objective functions:
• Separable convex minimization [MSW04]:
min
P
i
f
i
(c
T
i
x)
with f
i
is convex.
• Convex integer maximization (weighted) [DLHO
+
09]:
max f(Wx) , W ∈ Z
d×n
with f convex on Z
d
.
• Norm p (nearest to x
0
) minimization [HOW11]:
min kx − x
0
k
p
.
9
• Quadratic minimization [MSW04, LORW12]:
min x
T
V x
where V lies in dual of
quadratic Graver cone of A
• Polynomial minimization [LORW12]:
min P (x)
where P is a polynomial of degree
d, that lies on cone K
d
(A), dual of d
th
degree Graver cone of A.
It has been shown that only polynomially many augmentation steps are needed to solve
such minimization problems [HOW11] [DLHO
+
09]. Graver did not provide an algorithm for
computing Graver bases; Pottier [Pot96] and Sturmfels [ST97] provided such algorithms (see
Appendix A).
The use of test sets to study integer programs is a vibrant area of research. Another collection
of test sets is based on Groebner bases. See [CT91, TTN95, BLSR99, HS95] and [BPT00]
for several different examples of the use of Groebner bases for integer programs.
3 Graver Basis via Quantum Annealing
Here we present our first hybrid quantum classical algorithm, for Graver basis, constructed
from a subset of infinite set of kernels of matrix A (obtained using the quantum annealer by
solving a QUBO) and refining them classically:
• Quantum kernel: Calculate a subset of the kernel as discussed below.
• Classical filtering: Refine the Graver basis using v-minimal filtration on the kernel
subset.
This two step procedure is repeated in a loop until all required Graver basis elements are
acquired. In each iteration i within this loop, we extract the Graver basis of the given integer
matrix A for a given bound [L
g
, U
g
]. These bounds are updated adaptively [L
i
g
, U
i
g
] from one
iteration to another.
Each call of a hybrid quantum classical algorithm to extract Graver basis, inside such a
bounded region, is as follows:
10
Algorithm 1 Graver Extraction
1: inputs: Integer matrix A, Graver basis lower (L
g
) and upper (U
g
) bound vectors
2: output: Graver basis G(A), inside the bounded region [L
g
, U
g
]
3: Initialize: Graver set G(A), Kernel set K(A), Midpoint vector M
0
, Encoding length vector K
0
4: while (iteration i) ∆
G
i
(A)
6 δ do
5: Reshuffle columns of A, using random permutation P
i
6: Construct QUBO matrix Q
i
B
, using equation (8), (see 3.1)
7: Find optimal and suboptimal solutions [x
o
i
, x
s
i
] = Quantum Solve(Q
i
B
), (see B)
8: Revert variable orders (using P
i
)
9: Post-process suboptimals x
s
i
into new optimals x
no
i
, (see 3.2.3)
10: Create unique kernel set K
i
(A) = x
o
i
S
x
no
i
11: G(A) = G(A)
S
K
i
(A) and K(A) = K(A)
S
K
i
(A)
12: # Kernel to Graver, v minimal post-processing:
13: for v
1
, v
2
in G(A) do
14: if v
1
v v
2
then G(A) = G(A)\v
2
15: end for
16: G(A) = Residual P rocedure(G(A), K
i
(A)); (see 3.3)
17: [M
i+1
, K
i+1
] = Adaptive Adjustments P rocedure(M
i
, K
i
, x
s
i
); (see 3.4)
18: end while
19: return G(A)
3.1 QUBOs for Kernels
The mapping of the kernel problem into a QUBO is the essential quantum step in our hybrid
approach. Each call of a quantum-annealing based QUBO solver can– through multiple
reads– extract several (unique) degenerate ground states. We expect to be able to compute
a large sampling of the kernel of A in one or more calls (of 10000 reads each).
We need to solve
Ax = 0, x ∈ Z
n
, A ∈ Z
m×n
,
which is computationally hard, in a
bounded region [Pap81]. Instead, we look to find a large sampling of the non-zero elements
of the kernel. To do this, we use quadratic unconstrained integer optimization (QUIO):
min x
T
Q
I
x , Q
I
= A
T
A , x ∈ Z
n
x
T
=
x
1
x
2
. . . x
i
. . . x
n
, x
i
∈ Z
(5)
3.1.1 Integer to binary encoding
Because the quantum annealer solves quadratic unconstrained binary problems, we need to
encode the integer variables into binary variables through an integer to binary mapping.
Due to the limited number of qubits available, we need to be efficient in our encoding. We
do so by adaptively allocating the qubits to the variables, so that the variables may have a
different number allocated to them in any given iteration. In subsequent iterations, based
11

on which variable appears to be in need, we readjust the allocation. We also re-center our
variables adaptively to further increase the efficiency of encoding. We discuss this in a later
subsection (see 3.4).
To map an integer variable to a binary, while keeping the problem quadratic, we use a linear
mapping: x
i
= e
T
i
X
i
where e
T
i
=
e
1
i
e
2
i
· · · e
k
i
i
∈ Z
k
i
+
is the linear encoding vector and
X
T
i
=
X
i,1
X
i,2
· · · X
i,k
i
∈ {0, 1}
k
i
is the encoded binary vector that encodes integer
value x
i
. The k
i
is the length (number of bits) of encoding vector e
i
, and depends on the
linear encoding scheme that is in use. For a specific integer length, the difference between
the upper bound of x
i
to the lower bound of x
i
is ∆
i
= Ux
i
− Lx
i
; thus, the minimum
k
i
is dlog
2
∆
i
e for binary encoding with the encoder vector e
T
i
=
2
0
2
1
· · · 2
k
i
, and
the maximum k
i
is ∆
i
for unary encoding with the encoder vector e
T
i
=
k
i
z }| {
1 1 · · · 1
.
Therefore,
x = L + EX =
Lx
1
Lx
2
.
.
.
Lx
n
+
e
T
1
0
T
· · · 0
T
0
T
e
T
2
· · · 0
T
.
.
.
.
.
.
.
.
.
.
.
.
0
T
0
T
· · · e
T
n
X
1
X
2
.
.
.
X
n
(6)
where E is a (n ×
n
P
i=1
k
i
) matrix that encodes the integer vector x into binary vector
X ∈ {0, 1}
P
k
i
and L is a (n×1) vector containing the integer variable’s lower bounds. (If one
chooses the same encoding size for all integer variables
e = e
i
, k = k
i
, ∀i = 1, . . . , n,
then the (n × nk) encoding matrix simplifies to E = e ⊗ I
n
, where ⊗ is the Kronecker
product and I
n
is the identity matrix of size n.) Inserting (6) into (5):
x
T
Q
I
x = (L + EX)
T
Q
I
(L + EX) = X
T
E
T
Q
I
EX +
X
T
E
T
Q
I
L + L
T
Q
I
EX
+ L
T
Q
I
L
(7)
The last term in equation (7) is constant. Because x
2
i
= x
i
for binary variables, the middle
linear terms can be rewritten as X
T
diag
2L
T
Q
I
E
X. Therefore the quadratic unconstrained
binary optimization formulation simplifies to,
min X
T
Q
B
X
, Q
B
= E
T
Q
I
E + diag
2L
T
Q
I
E
X ∈ {0, 1}
nk
, Q
I
= A
T
A
(8)
3.1.2 Sampling the kernel
The QUBO in equation (8) has inherent symmetry in Q
I
for each of the variables. For
a randomly chosen integer matrix A, the valleys for all degenerate solutions should have
similar spreads. This gives us optimism that with certain variable perturbations and some
12
post-processing of near-optimal solutions, we should be able to sample well. Additionally,
because we solve (8) in a sequence of adaptive D-Wave calls, fine-tuning the bit sizes for
each variable and targeting our kernel search, we expect that although the D-Wave annealer
is not an uniform sampler (in the theoretical sense, see [MZK17]), we should nevertheless be
quite successful.
We should mention that applying any modification that changes Q
B
requires a new embed-
ding of the modified problem graph into the sparse hardware graph of the D-Wave processor,
which is a downside. Using D-Wave SAPI in-house embedder program, the embedder starts
from scratch each time, which creates an unknown delay in each iteration of the main loop.
We have designed a new approach that transforms the embedding of any problem graph
into any hardware graph into an equational system of quadratic integer equations and solves
them by powerful tools of algebraic geometry and Groebner bases [DAT18b]. This approach
has the property that minor changes in Q
B
result in only minor change in equations, thus
the Groebner bases solver still utilizes the majority of simplified equations from the previous
pool of equations that leads to shorter embedding time for minor changes in Q
B
. We have
not used this new embedding approach in this paper, however, as our goal was to see what
the available hardware and SAPI could do.
3.2 Post-Processing
We have developed two post-processing steps to be done classically.
3.2.1 Systematic post-processing of near-optimal solutions into optimal
Implementation of the model in equation (7) on the D-Wave quantum annealing solver
(DW2000Q, solver id: C16-VFYC) shows promising results in extracting degenerate kernel
solutions, especially when using minimize energy chainbreak strategy (see Appendix B). For
a random selection of integer matrices with various sizes, one run of the processor with
approximately 10000 reads (annealing time 290 msec) returns ≈ 100 − 150 unique (non-
similar) optimal and suboptimal solutions. Among these, ≈ 10 − 20 are optimal degenerate
solutions and the rest are suboptimal solutions.
Analysis of these suboptimal solutions shows that, remarkably, the majority (over 87%) of
them have very small errors, and so are near-optimal. This motivated us to design a post-
processing procedure to extract more degenerate solutions from the existing suboptimal
solutions. Because this post-processing is based on our known problem (Ax = 0), the
operations required to reach the optimal solutions are systematic and with known predictable
polynomial overhead.
13
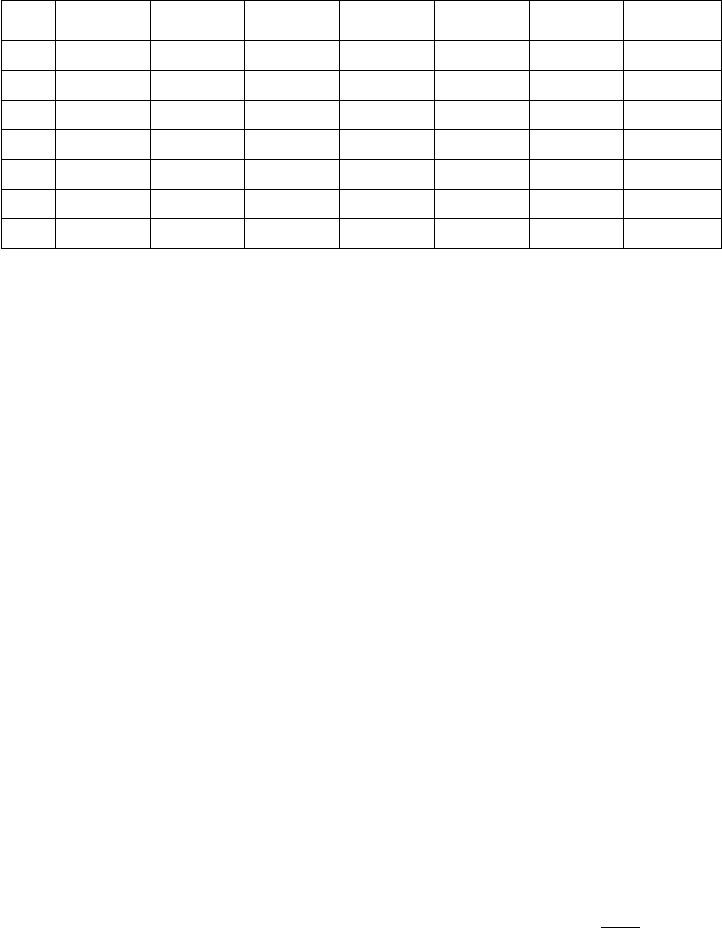
3.2.2 Distribution of optimal and near-optimal solutions: Experimental results
We chose a selection of random integer matrices A ∈ Z
m×n
, −10 6 a
ij
6 10
; ten matrices
from each size (m × n) ∈ {(2 × 5) , (3 × 5) , (3 × 6) , (3 × 7) , (4 × 8) , (5 × 8)}. Having
a fixed embedding for each size category, we acquired the unique solutions of each call (10000
reads per call, annealing time of 290nsec), and evaluated the percentage of unique solutions,
which fall into any of the seven solution categories: zero error (optimal solutions), 1 to 5
total sum errors, and greater than or equal to 6 total sum errors.
.
.
.
(2 × 5) (3 × 5) (3 × 6) (3 × 7) (4 × 8) (5 × 8) Overall
0 15 12 10 13 12 9 11.8
1 24 28 26 31 30 33 28.7
2 31 28 27 24 21 25 26.0
3 20 21 25 19 20 17 20.3
4 7 8 10 9 9 8 8.5
5 2 1 0 3 4 5 2.5
>6 1 2 2 1 4 3 2.2
Table 1: Optimal and suboptimal solution percentages for various size matrices.
As seen in Table 1, over 75% of unique solutions, fall into the categories with total sum
errors 1 to 3. Overall, 87% of unique solutions are either optimal solutions or near-optimal.
3.2.3 Combining near-optimal solutions
Assume x
u
∈ Z
n×N
is the unique solution matrix (each column is a unique read), acquired
by filtering out the repeated solutions out of all reads from the quantum annealer.
The matrix Ax
u
= E
r
contains the b values in each of N columns. We expect that b = 0
for optimal solutions, and b 6= 0 but 1
n
|b| small for nonoptimal solutions. We sorted and
separated the columns of x
u
based on their corresponding sum of absolute value error in
E
r
. Because the majority of reads have no maximum error greater than 3, we categorized
solutions into four groups of 0, 1, 2, and 3 total sum errors. The solutions with a total sum
of 0 obviously do not need post-processing.
Post-processing for the solutions with a total sum error = 1 For each row r
i
, 1 ≤ i ≤ m
all columns with +1 error and all columns with -1 error consist two sub-groups. For each row,
thus, we have three sets of operations: Subtracting all +1 columns pairwise, subtracting all
-1 columns pairwise, and adding any of columns from +1 to any of columns from -1 pairwise.
The above-mentioned operations, on average for all m rows, cost O
3N
2
u1
4m
pairwise column
additions, where N
u1
is the number of unique solutions with a total sum error of 1.
14
Post-processing for the solutions with total sum error = 2 The absolute sum error
=2 situation has two cases. The first one is similar to the previous case; for each of the
m rows, we have either +2 or -2 (and of course 0), which we will resolve similarly. In the
second case, for each pair of rows,
r
i
, r
j
, i, j = 1, . . . , m
, among m(m − 1)/2 possible
pairs, we have four sub-groups of errors (r
i
, r
j
) that are (+1, +1), (+1, -1), (-1, +1), and (-1,
-1). For each sub-group any pairwise subtraction results to zero. Additionally, we have two
sub-groups of (+1, +1), (-1, -1) and (+1, -1), (-1, +1) that can have pairwise subtraction
to result in zero. The above-mentioned operations, for all m rows, on average roughly cost
O
3N
2
u2
4m
column pairwise additions to resolve +2, -2 errors and O
3
8
N
2
u2
pairwise additions
to resolve the eight remaining categories of various +1, -1 errors, where N
u2
is the number
of unique solutions with a total sum error of 2.
Post-processing for the solutions with total sum error = 3 This situation has three
general categories of errors. As before, if for each of m rows, in each column we have either
+3 or -3, this case is similar to the first case (and the first case in the second situation) and
is resolved similarly. The second case here has similarities with the second category of the
second case. It consists of 4 subgroups on m(m − 1)/2 pairs of rows, that have (-2, -1), (-2,
+1), (+2, -1), (+2, +1). Likewise, it needs in-group subtraction for each of the four groups
and two pairwise additions between the subgroups (-2, -1), (+2, +1) and (-2, +1), (+2, -1).
The third category consists of columns, which have one of the eight groups of (-1, -1, -1), (-1,
-1, +1), (-1, +1, -1), (-1, +1, +1), (+1, -1, -1), (+1, -1, +1), (+1, +1, -1), (+1, +1, +1). For
every triple row among
m
3
possible row combinations, we have eight in-group pairwise
column subtractions, plus four out-group pairwise additions between (-1, -1, -1), (+1, +1,
+1), (-1, -1, +1), (+1, +1, -1), (-1, +1, -1), (+1, -1, +1), (-1, +1, +1), (+1, -1, -1). These
operations, for all m rows, on average roughly cost O
3N
2
u3
4m
column pairwise additions to
resolve +3, -3 errors and O
3
8
N
2
u3
pairwise additions to resolve the eight category of +/-2,
+/-1 errors, and maximum O
2
9
mN
2
u3
for resolving 12 cases with three +/-1 error in a
column, which N
u3
is the number of unique solutions with total sum error equal to 3.
Notes:
(a) The routine used in case sum error =1 is reused (with different values) in the first cases
of sum error=2 and sum error=3. Similarly, the routine used in the second category of sum
error =2 is used in the second case of sum error =3.
(b) This systematic post-processing procedure can go to higher levels of errors, but detailed
analysis of all unique solutions using the D-Wave processor shows that the majority of sub-
optimal solutions have sum errors up to 3 (with low chainbreak rate, also while using the
minimize energy chain break strategy), so we did not implement the post-processing for the
higher error values.
15
(c) Notice that the span of values for post-processed solutions becomes twice the original
span of values set by encoding size, because there are additions of columns, thus it acts like
adding one extra bit to each variable.
3.3 Using Residual Kernel to Obtain More Graver Bases Elements
After acquiring the kernel set K
i
in call iteration i, by sifting the v minimal elements of
the kernel into Graver bases elements G
i
, many of the kernel elements that are not part of
the Graver bases (or any multiple of them) are left unused (K
∗
i
: K
i
= G
i
∪ K
∗
i
). They
are either: (1) a linear combination of the Graver bases elements already found, or (2) a
linear combination of found and not yet found Graver bases elements. The second case is of
interest. Inspired by Pottier’s algorithm, the post-processing procedure to acquire the not
yet found Graver bases elements, from these extra kernel elements, is as follows:
Algorithm 2 Residual Kernel
1: input (iteration i) Partial Graver basis set G
i
and existing kernel set K
∗
i
2: output Graver basis set G
r
i
⊆ L\ {0}
3: Initialize symmetric set: K ← K
∗
i
∪ (−K
∗
i
)
4: Generate (in orthant θ
j
) the vector set: C
j
←
S
f
j
∈K,g
j
∈G
i
f
j
+ g
j
5: Collecting residues from all existing orthants: C
i
:=
S
j
C
j
6: Extracting the v conformal minimal elements: G
r
i
=v (G
i
∪ C
i
)
7: return G
r
i
This simple post-processing procedure is implemented inside the Graver extraction algo-
rithm.
3.4 Adaptive Centering and Encoding
We formulated instances of the problem QUBO in such a way that one can change each
integer variable’s number of encoding bits k
i
allocated to variable x
i
. We also formulated
the QUBO such that the encoding’s base value, either the lower point L
x
i
or the central
point (see equations 6 to 8) can be adjusted.
In each iteration, we check the previous iteration solution’s possible border (corner) values
among suboptimal unique solutions. A solution has a border value if its value is either the
upper or the lower value of the encoding range. For example, if a variable has 4 bits encoding,
the solution range (considering a zero encoding center) is between −8 to +7; thus, if the
suboptimal solution is either −8 or +7, it is on the border. If a solution in iteration i is on
the border, we expect that a better solution lies beyond this border. So, we can adapt either
(or both) the center and size of this variable in the next iteration. In the previous example
having a value of +7 is an indication that in iteration i + 1, the center could be moved
16
toward +7. Instead of just moving the center, we can also increase the encoding length of
that variable by one, and decrease the encoding length of another variable (which has small
enough values).
We initially use the same encoding length and zero center for all variables. To prevent sudden
changes in encoding length and base, we employed a moving average-based filtering method.
A simplified version of the adaptive adjustment is as follows:
Algorithm 3 Adaptive Adjustments
1: input (iteration i) Middle points vector M
i
, Encoding lengths vector K
i
, suboptimals vector x
i
2: output Middle points vector M
i+1
, Encoding lengths vector K
i+1
3: Calculate saturated borders: right border and lef t border based on M
i
and K
i
4: # Adaptive adjustment of middle points
5: if (x
i
== right border(M
i
, K
i
)) then
6: M
i+1
= M
i
+ 1
7: else if (x
i
== lef t border(M
i
, K
i
)) then
8: M
i+1
= M
i
− 1
9: end if
10: # Adaptive adjustment of encoding lengths
11: if |x
i
− M
i
| 6 2
K
i
−1
then
12: K
i+1
= K
i
− 1
13: end if
14: return M
i+1
and K
i+1
3.5 Numerical Results
We provide several examples illustrating the calculation of Graver bases using the D-Wave
quantum annealer. We used the chain break post-processing minimize energy first, and then
redid the calculations using majority vote (see B.2.2 for definitions).
3.5.1 Example 1: Four coin problem
Consider the problem of four coins discussed in [Stu03], which asks for replacing a specific
amount of money with the correct combination of pennies (1 cent), nickels (5 cents), dimes
(10 cents), and quarters (25 cents) and a fixed total sum of coins.
A =
1 1 1 1
1 5 10 25
Allocating k = 4 bits for each of the variables, hence limiting the integer variable span to
[−8, +7] using binary encoding, one call obtained four out of five Graver basis without any
post-processing. Obviously, because one of the basis elements is out of encoding range, it
17
could not be found. However, because we post-process near optimal solutions, using only
sumerror = 1, post-processing extracted the other basis element. The Graver basis, also
used in our illustrative example (1.1), is
G(A) =
0 5 5 5 5
3 −9 −6 −3 0
−4 4 0 −4 −8
1 0 1 2 3
Changing the chain break to majority vote, we still extract all the Graver basis using two
D-Wave calls (average 52% chainbreak).
3.5.2 Example 2: Variation problem
The following (3 × 6) matrix in an example given in [ST97]:
A =
2 1 1 0 0 0
0 1 0 2 1 0
0 0 1 0 1 2
Here n = 6, r = 3 and ∆(A) = 2. Based on Proposition 1-iv (equation 4), kgk
∞
6 6,
we start by allocating k = 3 bits for each of the six variables, hence limiting the integer
variable span to [−4, +3] using binary encoding. One D-Wave call extracted 10 Graver basis
elements. Increasing k to 4, still gives us the same 10 Graver basis elements.
G(A) =
0 0 0 0 1 1 1 1 1 1
0 1 1 2 −2 −2 −1 −1 0 0
0 −1 −1 −2 0 0 −1 −1 −2 −2
1 −1 0 −1 0 1 0 1 −1 0
−2 1 −1 0 2 0 1 −1 2 0
1 0 1 1 −1 0 0 1 0 1
Changing the chain break to majority vote, we extract all the Graver basis in one D-Wave
calls (average only 8% chainbreak, due to the small size of the problem, thus small length of
chains).
3.5.3 Example 3: Snake-wise prime number
Consider the problem of filling a matrix snake-wise with prime numbers from Ref. [Stu03],
but with smaller matrix size of (2 × 5):
A =
1 2 3 5
15 13 11 7
18
This matrix has 22 Graver basis elements that were extracted in 3 calls using 6 bits of binary
encoding and utilizing all three post-processings.
G(A) =
0 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17
2 −40 −38 −36 −34 −32 −30 −28 −26 −24 −22 −20 −18 −16 −14 −12 −10 −8 −6 −4 −2 0
−3 21 18 15 12 9 6 3 0 −3 −6 −9 −12 −15 −18 −21 −24 −27 −30 −33 −36 −39
1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 19 19 20
Choosing the higher sizes for the snake-wise prime number matrix increases the Graver basis
element range, which needs a higher number of binary encoding bits, thus makes the problem
unembeddable in the current processor. Changing the chain break to majority vote, we could
extract all the Graver basis in 8 D-Wave calls (average 61% chainbreak).
3.5.4 Example 4: Some random matrices of size (2 × 5)
The following matrix from Ref. [Onn10]:
A =
−8 −9 1 0 4
4 1 8 −2 5
This matrix has 107 Graver basis elements. Using 6 binary encoding followed by three level
post-processing and adaptive encoding of the center, in five D-Wave calls, 98 of the Graver
basis were acquired.
Choosing a random integer matrix of the same size, with integer values spanning between
-10 and 10, roughly 90 percent of the Graver basis elements were acquired in less than 10
D-Wave calls. Changing the chain break to majority vote, we could extract only 12% of the
Graver basis in 10 D-Wave calls (average 72% chainbreak).
3.5.5 Example 5: Four cycle binary model
The four-cycle binary model matrix size (16 × 16) in [Stu03]:
19
A =
1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 1 1 1 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 1 1 1 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1
1 1 0 0 0 0 0 0 1 1 0 0 0 0 0 0
0 0 1 1 0 0 0 0 0 0 1 1 0 0 0 0
0 0 0 0 1 1 0 0 0 0 0 0 1 1 0 0
0 0 0 0 0 0 1 1 0 0 0 0 0 0 1 1
1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0
0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0
0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0
0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1
1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
0 1 0 1 0 1 0 1 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 0 1 0 1 0 1 0
0 0 0 0 0 0 0 0 0 1 0 1 0 1 0 1
The rank of this matrix is 9, and the maximum of all sub-determinants is 1, thus based on
the upper bound evaluation, Proposition 1-iv, equation (4) in section (2), the Graver basis
has no element greater than 7. It has 106 elements, and all of them were acquired with three
D-Wave calls by setting annealing time to the maximum value of 280µsec (while having
10000 reads). Interestingly, only one D-Wave call was needed when using the annealing time
of 1µsec.
By creating and storing the fixed size embedding of a complete graphs of size 64, we can
eliminate the embedding time. This ultimately reduces the total computation time of Graver
basis of this matrix with current D-Wave processors to only 4.38sec. The majority of this
time is due to the quantum processing unit access time. The total time derived by the
classical program 4ti2 for this problem is about 3.0 seconds. This gives us optimism that
first generation quantum annealers (with a first attempt at hybrid algorithms) are not that
far behind best-in-class classical algorithms. Changing the chain break to majority vote, we
could extract only 9% of the Graver basis in 10 D-Wave calls (annealing time 280µsec) with
the average 80% chainbreak.
3.5.6 Example 6: Random low span integer matrices of size (4×8)
Using random integer matrices of size (4×8), with a low integer value span of (-4 , +4), and
using 6 binary encoding, we could calculate almost all of the Graver basis elements in less
than 5 D-Wave calls (10000 reads, annealing time 280µsec). Reducing the annealing time to
a minimum of (1 − 10)µsec increased the number of unique solutions per call, but with the
price of increased percentage of chainbreaks. Changing the chain break strategy to majority
vote, and returning the annealing time back to 280µsec and specific embeddings, we could
20
extract 15% of the Graver basis with 10 D-Wave calls, while the average chainbreak was
65%.
3.6 Discussion
In general, we did not expect the current version of the quantum annealer (D-Wave 2000Q)
to be competitive against classical computing that has decades of innovations and imple-
mentation improvements. Our motivation in this work was to demonstrate the possibility of
calculating the Graver bases and subsequently optimization of nonlinear convex costs, using
a quantum-classical approach.
3.6.1 Chainbreak
As we observe from the examples, the percentage of Graver basis acquired using D-Wave
processor is mainly dependent on chainbreak strategy (see B.2.2). The reality is that with
the current sparse Chimera structure, the majority of problems embedded end up becoming
very dense, and thus have long chains, which are prone to be broken. For such problems when
using minimize energy, we obtained many unique solutions (1000+), as many as just one
order of magnitude less than number of reads (10000), which makes our hybrid approach
competitive with classical methods. While using majority vote, however, the number of
unique solutions drops significantly, sometimes by two or three orders of magnitude from
10000, making it difficult be competitive to classical algorithms.
3.6.2 Communication delays
The communication delay from our local computer to the D-Wave machine, in addition
the unknown job queuing delay before quantum processing, is an unknown idle time. This
happens between classical and quantum computations in each iteration. These prevent us
from carrying out an exact time comparison between our hybrid algorithm and classical
Graver basis software packages, such as 4ti2 [noa]. The lower bound for the computation
time is the quantum processor total annealing time, which is low, and the upper bound is
the overall time, which contains all extra idle times. One way of keeping score is to track
the number of quantum calls, each with a maximum of under 3 seconds (10000 reads with a
maximum anneal time of 290 µsec.)
Detailed tests of the 4ti2 package (and other classical solvers) shows that when the problem
size approaches 120 variables (for random binary matrices), the classical method takes a
long time to find the Graver basis elements. In other words, it reaches its exponential crunch
point. We believe that for such problems, the majority of Graver basis elements can be found
with 4-5 bits of encoding for each variable. Thus, if we had a quantum annealer with a higher
graph density, or higher number of qubits and the same density, which could embed problems
of size 200, we could surpass the current classical approaches. (We also see this in our next
21
section with respect to optimization.) This is not unrealistic with the next generation of
D-wave processors being developed [Boo18].
4 Hybrid Quantum Classical Algorithm for Non-Linear
Integer Optimization
4.1 Algorithm Structure
For solving problem types given in equation (2), we do not necessarily need all Graver basis
elements at the beginning of the algorithm. Therefore, we propose the following:
• Truncated Graver basis: Calculate the Graver basis, just for the bound set by
difference of the upper and lower bound.
• Initial feasible point(s): Using a call to the quantum annealer, find the set of feasible
solutions and select one with minimum cost, or many, to increase redundancy.
• Augmentation: Successively augmenting to better solutions, as discussed in Propo-
sition 1-(iii).
Our hybrid quantum classical algorithm to find the optimum value of a nonlinear integer
program is as follows (simplified). This algorithm uses Algorithm 1 to extract Graver basis.
Algorithm 4 Graver Optimization
1: inputs: Matrix A, vector b, cost function f(x), bounds [l, u], as in Equation (2)
2: output: Augmentation evaluation of the objective function f(x) and reaching to global
solution x
∗
.
3: Using Algorithm 1 inputs: A, L
g
= −(u − l), U
g
= +(u − l), extract truncated G(A)
4: Finding a set of feasible solutions using Equation (11), while maintaining l 6 x 6 u using
middle point vector M and encoding length vector K.
5: Sort the feasible solutions from low to high according to evaluated objective functions.
6: Select the feasible solution x
0
corresponding to the low objective value (x = x
0
).
7: while g ∈ G(A) do
8: if l 6 (x + g) 6 u and f(x + g) < f(x) then
9: x = x + g
10: end if
11: end while
12: return x
∗
= x
22
4.2 QUBO for Obtaining Feasible Solutions
We first obtain a feasible solution for Ax = b as follows. Note:
(Ax − b)
T
(Ax − b) = x
T
A
T
Ax −
x
T
A
T
b + b
T
Ax
+ b
T
b (9)
The last term is constant, and the two middle terms are equal; hence to solve Ax = b one
needs to solve the quadratic unconstrained integer optimization (QUIO):
min x
T
Q
I
x − 2b
T
Ax , Q
I
= A
T
A
x ∈ Z
n
(10)
After applying the integer to the binary encoding of equation (6), the quadratic uncon-
strained binary optimization (QUBO) simplifies to.
min X
T
Q
B
X
, Q
B
= E
T
Q
I
E + 2diag
L
T
Q
I
− b
T
A
E
X ∈ {0, 1}
nk
, Q
I
= A
T
A
(11)
4.3 Parallel Augmentations with Limited Elements of the Graver
Bases
From a feasible solution, we augment using the Graver basis. Depending on where the initial
feasible solution is and where the unknown optimal solution falls, the path between these
two points is a vector that falls into a specific orthant. The sooner the algorithm derives the
Graver basis inside this unknown orthant, the quicker it reaches the optimal solution. Thus,
it is better if one starts with several feasible solutions and perform augmentation on several
of them, in parallel. Thus, during the iterative course of building Graver basis, there would
be a higher likelihood of reaching the optimum value faster. The integer solution can be
recovered from the binary solution after each run using the integer to binary transformation
given in equation (6).
4.4 Numerical Results
We explore two different nonlinear integer programs. In the first case (motivated by a
problem in Finance), the integer variables are binary. Therefore, l = 0 and u = 1, so the
required Graver basis is a truncated (boxed) Graver basis G(A), g
i
∈ {−1, 0, 1}
n
. The second
example is an integer optimization problem with a low integer span x ∈ {−2, ..., 2}
n
.
In both examples, we have used Algorithm 1 to generate a truncated Graver basis and
Algorithm 4 to optimize the given cost function.
23

4.4.1 Case 1: Nonlinear 0-1 program with 50 binary variables
The risk-averse capital budgeting problem with integer (or binary) variables is of the form [AN08]:
(
min −
P
n
i=1
µ
i
x
i
+
q
1−ε
ε
P
n
i=1
σ
2
i
x
i
2
Ax = b , x ∈ {0, 1}
n
(12)
where µ
i
0
s are expected return values, σ
i
0
s are variances, and ε > 0 represents the level of
risk an investor is willing to take. The linear constraints are the risk-averse limits on the
capital budget. The solution(s) to this problem are efficient portfolios, which matches the
budget constraints. The objective function is a sum of a linear and a convex nonlinear term.
We randomly generated many (5 × 50) binary matrices A. Similar to [AN08], we set b as
close as half of row-sum of A. Also, µ
i
is chosen from the uniform distribution [0, 1] and σ
i
is chosen from the uniform distribution [0, µ
i
]. The risk factor is set at ε = 0.01 to make the
problem realistic as well as among the hardest to solve for classical MIP solvers.
For n = 50, we needed at least k
i
= 2 bits to cover {−1, 0, 1} span needed for a trun-
cated Graver basis. This makes the problem size equal to 100, which is not embeddable on
the current D-Wave chip. But if we choose k
i
= 1 bit, by benefiting from suboptimal post
processing, the span of results doubles (as we discussed in 3.2.3). All embeddings in this
problem are a complete graph embedding of size 50, which is very convenient. For k
i
= 1,
which is the combinatorial case, the 2
i
exponential binary encoding terms do not exist (ex-
cept 2
0
= 1); therefore, q
ij
or J
ij
coupler values stay more uniform. Also, having only 0 and
1 in integer matrix A results in fewer number of (unique) coupler values. These factors cause
fewer chain breaks; therefore, chainbreak strategy majority vote works as well as minimize
energy, in this specific configuration. Both yield many unique kernels, which help to extract
Graver basis elements efficiently.
Here is an example that typifies several of our findings. The matrix is:
A =
0 0 0 0 0 1 0 0 1 0 1 0 1 0 1 1 1 0 0 1 0 0 0 0 0 1 1 0 0 1 1 1 1 0 1 0 0 0 1 0 0 1 0 0 0 1 1 1 0 0
0 0 0 0 1 0 0 0 1 0 0 1 0 1 1 0 1 0 0 1 0 0 0 1 1 1 0 1 0 1 1 1 1 1 1 0 0 0 0 1 1 0 0 0 1 0 0 1 0 0
0 0 0 0 0 1 0 1 0 1 1 0 0 1 1 1 0 1 1 1 0 0 0 0 1 0 1 1 0 0 0 0 1 0 0 1 0 1 0 0 0 0 1 1 0 1 0 0 1 0
1 1 1 1 1 0 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 0 1 0 0 1 1 0 1 1 0 1 0 0 0 1 0 0 1 1 0 0 1 0 1 0 0 1 0
0 1 0 0 0 1 0 1 1 0 1 0 0 1 0 1 0 1 1 0 0 0 0 0 1 0 0 0 0 0 1 0 0 1 0 1 1 1 1 0 1 1 1 0 0 0 1 0 0 1
The expected return vector is also created as a uniform real random variable in [0, 1] range:
µ =
0.4718 0.7759 0.8211 0.2811 0.6575 ... 0.5669 0.1867 0.406 0.3712 0.09876
T
The variance for each term σ
i
is a real random variable between 0 and µ
i
:
σ =
0.4383 0.5841 0.07405 0.09704 0.1738 ... 0.337 0.1412 0.05004 0.3668 0.00677
T
24
We chose the budget values equal to half of the sum of each row of A: b =
10 11 10 13 11
T
based on [AN08]. Readers can use this code
1
in Matlab to regenerate the exact problem val-
ues (A, µ, σ, b). Also, ε = 0.01 to make the problem harder to solve, according to [AN08].
The Graver basis of matrix A inside the box {−1, .., 1} has 304 (608 including symmetric
elements) basis elements. The first and last 10 vectors of the Graver basis are shown in
Figure 3. This Graver basis is calculated using one call of D-Wave (10000 reads, annealing
time = 1µsec.) using minimize energy chainbreak strategy (or three calls using majority vote
chainbreak strategy).
We solved the Ax = b using one call to the D-Wave quantum annealer, with 10000 reads,
annealing time = 1µsec.. Over 6000 unique solutions were obtained using minimize energy
chainbreak (and over 3000 unique solutions using majority vote chainbreak strategy).
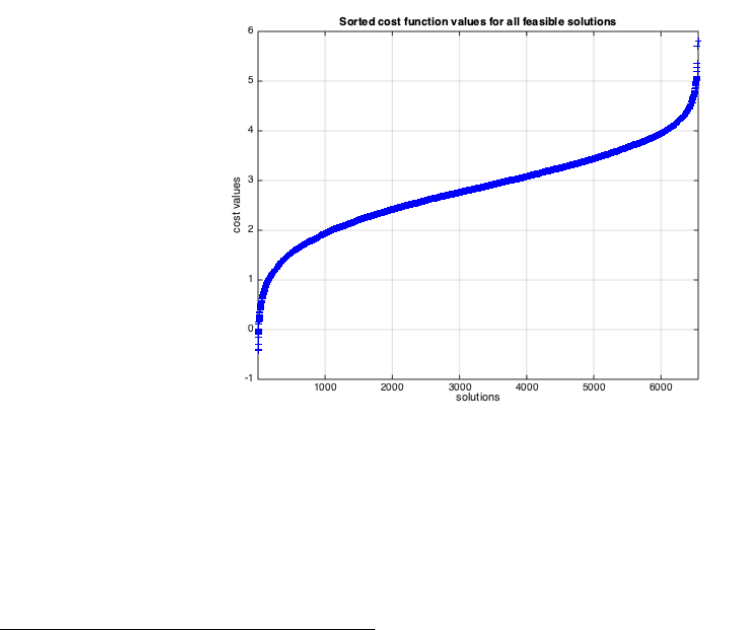
Evaluating the optimization cost function over the set of all obtained feasible solutions gives
us a range of cost values and is shown in Figure 2. What is interesting – as we see after
augmentation – is that the optimal solution is quite far way from these 6000+ solutions.
Figure 2: The sorted cost values of all feasible solutions
As it can be seen, for various solutions the cost values changes from a maximum of 5.7999
1
rng = 1; m = 5; n = 50; A = randi([0 1],m,n); mu = rand(n,1); sigma = rand(n,1); sigma = sigma .* mu; b
= round(sum(A’)/2)’;
25
G(A) =
0 0 0 0 0 0 0 0 0 0 ... 1 1 1 1 1 1 1 1 1 1
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 1 1 1 1 1
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 −1 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 −1 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 −1 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 −1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 1 1 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 1 ... 1 1 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 −1 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 1 1 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 ... 0 0 −1 0 0 0 0 0 0 0
0 0 0 −1 0 0 0 0 0 0 ... 0 0 0 −1 0 0 0 0 0 0
0 1 1 0 −1 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 −1 0 −1 ... 0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0 ... −1 0 0 0 0 0 0 0 −1 0
0 0 1 0 0 0 1 0 0 0 ... 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 −1 0 0 0 −1 0 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
0 0 −1 0 0 0 −1 0 0 0 ... 0 0 0 0 0 0 0 0 0 0
−1 0 0 0 0 0 0 0 0 0 ... 0 −1 0 0 0 0 0 0 0 −1
0 0 −1 1 0 0 −1 0 0 0 ... −1 −1 −1 0 0 1 1 0 0 0
Figure 3: The first and last 10 elements of the Graver basis of the matrix A of Example 1
26

to a minimum of −0.4154. Clearly, a wise choice of initial feasible solution is to choose the
minimum solution corresponding to the minimum cost value, which is,
x
0
=
0 0 1 1 1 1 1 0 0 0 0 0 1 0 0 1 0 1 1 1 1 0 1 0 1 0 0 1 1 0 0 1 1 1 1 0 0 1 0 1 1 1 0 0 0 0 1 1 1 1
T
If we start the augmentation procedure from the minimum x
0
, using 24 augmenting (im-
proving) steps, we reach the global solution of the problem, which has a value of −3.6947.
A global solution for this problem is,
x
∗
=
0 0 1 1 1 1 1 0 1 0 0 0 1 0 0 1 0 1 1 1 1 0 1 1 0 0 1 1 1 0 0 0 1 1 1 0 0 1 1 0 1 0 1 0 1 0 0 1 0 1
T
If we instead start the augmentation from the farthest feasible point among all feasible
points, which is the solution corresponding to the cost value 5.7999:
x
0
=
1 1 0 0 1 0 1 1 1 1 1 1 0 1 1 1 1 0 0 0 1 0 1 1 1 1 0 0 1 1 1 0 0 0 0 1 1 0 0 0 0 1 0 0 0 1 0 0 1 0
T
using 30 augmenting (improving) steps we reach the same global solution.
As we can observe, although we initially had over 6000 feasible points, the minimum cost
value among these was −0.4154 which is not optimal. From the cost value of −0.4154 to
the optimum cost (−3.6947), we needed 24 augmentations. This does not mean that we
only did 24 comparisons. In fact, we tested all of the 2 × 304 Graver basis elements, three
times. Many of the choices of the form x + g resulted in values outside {0, 1} and could be
immediately ignored before calculating their cost.
4.4.2 Comparison with a best-in-class classical method
For a quick comparison with a leading edge classical solver, the same problem was passed to
the Gurobi Optimizer (latest version, 8.0)
2
. Gurobi solved the above problem in less than
0.2sec, which is much faster than our algorithm on D-Wave Processor. If we increase the
span of random integer terms (a
ij
’s) in matrix A, from {0, 1} to {0, ..., t}, by increasing t, the
problem becomes harder and harder for Gurobi. At t = 10, Gurobi needs 16sec, at t = 20
over 3min, at t = 30 over 5min, at t = 40 over 21min, at t = 50 over 75min, ... , and at
t = 100, even after 8 hours Gurobi could not solve the problem. Note that for our quantum
annealing algorithm, the size and number of calls to D-Wave and the embedding for all of
those t stays exactly the same. The only difference is that with increasing t, the number of
unique terms in the QUBO q
ij
’s that maps to the Ising model J
ij
’s (i.e. the cardinality of
set of J
ij
values) increases.
For t = 1, there are 6 unique terms, for t = 10: ' 230, for t = 20: ' 620, for t = 30: ' 860,
for t = 40: ' 1030, for t = 50: ' 1070, and for t = 100: ' 1190 unique terms required
2
Installed on MacBookPro15,1: 6 Core 2.6 GHz Intel Core i7 processor, 32 GB 2400 MHz DDR4 RAM
27
to be mapped into a coupler. The current hardware has a limited precision (4bits = 16
steps) to address coupler instances. This matches the case of t = 1. Therefore, if the next
generation of quantum annealers invests in improving only the coupler precision (without
increasing the number of qubits or improving connectivity between them), we can match, or
even surpass, the current classical solvers, using our quantum algorithm, in a wide range of
nonlinear integer programming problems.
Now if we fix the matrix parameters (e.g. t = 1) and increase problem size (n), solving the
problem still becomes harder for Gurobi solver, whilst the number of unique coupler terms
roughly stays the same. For random problems with A
20×80
(size 80, 12 unique terms), Gurobi
needs ∼ 135sec, for A
25×100
(size 100, 16 terms), about ∼ 2hours and for A
30×120
(size 120,
16 terms), even after 3hours Gurobi did not converge to an optimal solution.
D-Wave’s technical report [Boo18] about their next generation chip - due to newly designed
denser connectivity structure called Pegasus- indicates it can embed complete graph problems
of size up to 180, and do so with lower chain lengths than the current D-Wave 2000Q
processor. We estimate, even if the new processor’s coupler precision is increased by only
one bit, due to embedding size expansion, our quantum classical algorithm can surpass
the speed of best-in-class classical solvers (e.g. Gurobi), in similar nonlinear combinatorial
programming problems with sizes greater that 100, up until 180.
Our approach is a first that benefits from many anneals (thus reads) of quantum annealer in
each call, not to increase the confidence of an optimal solution, but instead to sample many
optimal and near-optimal solutions of highly degenerate problems. Many unique feasible
solutions can be found very quickly. If the next generation of quantum annealing processors
can increase the maximum number of anneals per each call (from 10000 to say 100000), it
will significantly enhance the performance of our approach as the number of quantum calls
needed can be just one for Graver, and another for obtaining many good starting points for
optimization.
4.4.3 Case 2: Nonlinear low span integer program with 25 integer variables
Consider again the nonlinear programming problem shown in Equation (12), but now in
bounded integer form x ∈ {−2, −1, 0, 1, 2}
n
. To be able to embed the problem into the
current processor, we generate a 5 × 25 problem and use k = 2 bits for each integer variable.
Consider a typical example, where the matrix is:
28
A =
1 1 1 1 1 1 1 1 1 1 0 1 0 1 0 1 0 1 1 1 0 1 0 1 0
1 1 1 1 0 1 0 1 0 0 1 0 0 0 1 0 0 1 0 1 1 1 1 1 1
0 1 0 0 0 1 0 1 0 1 1 0 1 1 0 1 1 0 0 1 0 0 1 1 1
0 0 0 0 0 0 0 1 0 1 1 1 0 1 1 1 1 0 0 1 0 0 0 0 0
0 1 1 1 1 1 0 0 0 1 0 0 0 1 0 0 0 0 0 1 0 1 0 1 0
The expected return vector is a uniform real random variable of size 25 in [0, 1] range:
µ =
0.9277 0.06858 0.2994 0.5916 0.2033 ... 0.5098 0.9742 0.1973 0.1112 0.2974
T
The variance for each term σ
i
is a real random variable between 0 and µ
i
:
σ =
0.3677 0.02886 0.09326 0.4105 0.01868 ... 0.4081 0.8942 0.02709 0.05612 0.1204
T
We chose the budget values equal to half of sum of each row of A: b =
9 8 7 5 5
T
based on [AN08].
The lower and upper bounds for the problem variables are l = −21 and u = +21. Therefore,
the truncated Graver basis bound is [L
g
, U
g
] = [−41, +41]. Spanning the variables in this
range needs a little more than the average 3 bits encoding. We calculated all of the Graver
basis elements in this range using only 2 bits encoding length, in two D-Wave calls with a
center adjustment and benefiting from the range doubling obtained from suboptimal post-
processings (see 3.2.3). Matrix A in this band contains 2 × 616 Graver elements.
Separately, we solved Ax = b using one call to the D-Wave quantum annealer, having only
two bits of encoding (10000 reads, annealing time = 1µsec.). We chose the center of the two
bit encoding at 0. Therefore, it covers {−2, −1, 0, 1}, which is enough for finding an initial
point. The number of unique optimal solutions was 773 using minimize energy chainbreak
and 238 using majority vote chainbreak.
Evaluating the optimization cost function over the set of all solutions gives us a range of
cost values, as shown below.
The cost values range from maximum of 20.7211 for the initial feasible solution:
x
max
0
=
1 1 1 1 −1 1 1 1 1 1 1 1 −2 1 0 −1 0 1 −1 1 −2 −2 1 1 1
T
to minimum of 2.3622 for the initial feasible solution:
x
min
0
=
0 1 0 1 1 1 1 0 1 1 1 0 0 1 1 0 1 1 1 0 1 0 1 −1 1
T
29
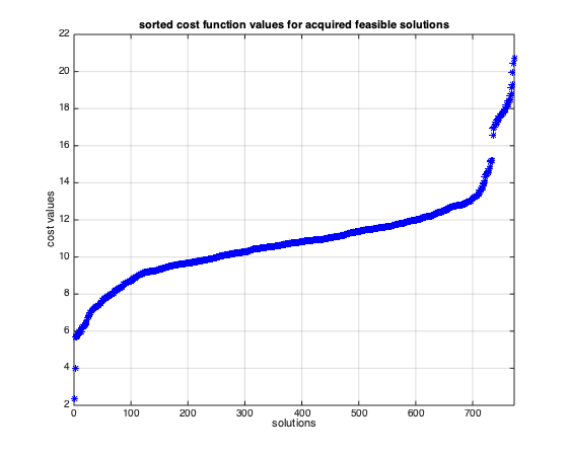
Figure 4: The sorted cost values of acquired feasible solutions for low span example
Starting from x
max
0
using 22 augmenting (improving) steps, the global solution is achieved,
while starting from x
min
0
using only 8 augmenting steps, the same global solution is achieved:
x
∗
=
0 1 1 0 2 0 0 0 2 0 2 1 −2 0 0 0 2 0 1 0 0 0 2 1 1
T
which has a minimum cost of −2.4603.
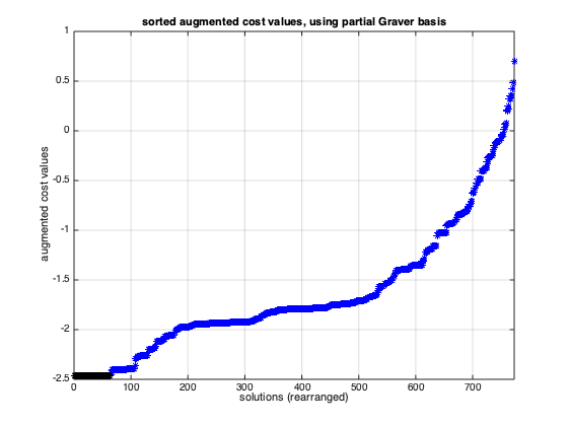
4.4.4 Augmenting with partial Graver basis
In the above, we assumed that all of the truncated Graver basis is acquired, thus starting
from any of the many available initial solutions, we reach the global solution. In fact,
the starting point affects only the number of augmentations required to reach the final
solution. Theoretically, if we have only one feasible solution and all of the Graver basis
elements in the required region, we certainly reach the global solution in polynomial number
of augmentations, for the proved class of nonlinear costs (see 2.2). Looking from the other
side of spectrum, if we have all feasible solutions and none of the Graver basis elements, just
by checking each feasible solution’s cost and finding the minimum among them, we reach
the global solution.
Our quantum annealing-based algorithm provides a third opportunity. If we have many
feasible solutions distributed in the solution space (let us say, uniformly), then we most
likely may reach the global solution even with a subset of Graver basis elements (which we
refer to as partial Graver basis). The point is, if we can not reach from a particular feasible
30
solution to a global one, due to lack of specific Graver basis elements in the available set,
other feasible solutions provide many other paths (to the global solution) that may not need
these specific Graver basis elements that are missing.
This interesting opportunity has borne out in our experiments. In the previous example, if we
call D-Wave only once for the Graver basis, we acquire almost 2 ×418 Graver basis elements,
which is 68% of the Graver basis elements previously found. Now, we start augmenting the
problem from all of 773 initial feasible points. Interestingly, using this partial Graver basis,
we could reach the global solution from 64 (out of 773) of the initial solutions; see Figure
(5) The other paths also terminate to very good near-optimal solutions (compare average
values in Figure 4, 10.9013, versus average values in Figure 5, −1.6546).
Furthermore, in case there is degeneracy in the global solution (that is, there are alternate
optimal solutions), this multi augmentation strategy can also result in several unique degen-
erate solutions. In the above example, the problem does not have a degenerate solution, and
so all 64 paths resulted in the same solution x
∗
, the only one.
Using many or all of the feasible solutions clearly adds linear computational cost to aug-
mentation, but the augmentation cost is low (polynomial) compared with the Graver cost.
Finding a good balance between the number of feasible solutions and the amount and vari-
ability of Graver basis elements would be an interesting experimental study.
Figure 5: The sorted augmented cost values for all feasible solutions, using partially acquired
Graver basis
31
5 Conclusions
In this paper, we demonstrate that calculation of Graver bases using quantum annealing,
and its subsequent use for nonlinear integer optimization, is a viable approach in available
hardware. To accomplish this, we developed several post-processing procedures, and an
adaptive approach that adjusts the encoding length as well as the center of the variables to
be efficient in the use of the limited number of qubits.
We did not expect to outperform best-in-class classical solvers, and indeed that was not our
motivation. If anything, we began as skeptics about the practical capabilities of the available
hardware. We are pleasantly surprised that we are able to solve many problems of medium
size in decent time, not too far behind the classical best, if we select problem instances that
are hard for classical approaches. Our tests suggest that with improvements in the number
of qubits and their connectivity, which have already been announced and are expected in
the near term, an improvement in the coupler precision will bring our hybrid quantum-
classical approach within reach of, or even surpass, the best-in-class classical algorithms for
an important class of non-linear integer optimization problems.
Acknowledgements
The authors thank Davide Venturelli, Eleanor G. Rieffel, Bryan O’Gorman, and other NASA
QuAIL team members for their comments and feedback.
Bibliography
[AN08] Alper Atamtürk and Vishnu Narayanan, Polymatroids and mean-risk minimiza-
tion in discrete optimization, Operations Research Letters 36 (2008), no. 5,
618–622. 24, 25, 29
[Bar82] F. Barahona, On the computational complexity of Ising spin glass models, Jour-
nal of Physics A: Mathematical and General 15 (1982), no. 10, 3241 (en). 37
[Ber18] Jesse J. Berwald, The Mathematics of Quantum-Enabled Applications on
the D-Wave Quantum Computer, arXiv:1812.00062 [quant-ph] (2018), arXiv:
1812.00062. 4
[BHJ
+
14] P. I. Bunyk, E. M. Hoskinson, M. W. Johnson, E. Tolkacheva, F. Altomare, A. J.
Berkley, R. Harris, J. P. Hilton, T. Lanting, A. J. Przybysz, and J. Whittaker,
Architectural Considerations in the Design of a Superconducting Quantum An-
nealing Processor, IEEE Transactions on Applied Superconductivity 24 (2014),
no. 4, 1–10. 37
32

[BLSR99] A. M. Bigatti, R. La Scala, and L. Robbiano, Computing Toric Ideals, Journal
of Symbolic Computation 27 (1999), no. 4, 351–365. 10
[Boo18] Kelly Boothby, Next-Generation Topology of D-Wave Quantum Processors, D-
Wave Technical Report (2018). 22, 28
[BPT00] Dimitris Bertsimas, Georgia Perakis, and Sridhar Tayur, A New Algebraic Ge-
ometry Algorithm for Integer Programming, Management Science 46 (2000),
no. 7, 999–1008. 10
[Cho08] Vicky Choi, Minor-embedding in Adiabatic Quantum Computation: I. The Pa-
rameter Setting Problem, Quantum Information Processing 7 (2008), no. 5,
193–209. 37
[CT91] Pasqualina Conti and Carlo Traverso, Buchberger Algorithm and Integer Pro-
gramming, Proceedings of the 9th International Symposium, on Applied Al-
gebra, Algebraic Algorithms and Error-Correcting Codes (London, UK, UK),
AAECC-9, Springer-Verlag, 1991, pp. 130–139. 10
[CUWW97] G. Cornuejols, R. Urbaniak, R. Weismantel, and L. Wolsey, Decomposition of
integer programs and of generating sets, Algorithms — ESA ’97 (Rainer Burkard
and Gerhard Woeginger, eds.), Lecture Notes in Computer Science, Springer
Berlin Heidelberg, 1997, pp. 92–103 (en). 37
[DAT18a] Raouf Dridi, Hedayat Alghassi, and Sridhar Tayur, Homological description
of the quantum adiabatic evolution with a view toward quantum computations,
arXiv:1811.00675 (2018). 37
[DAT18b] , A novel algebraic geometry compiling framework for adiabatic quantum
computations, arXiv:1810.01440 (2018). 13, 37
[DLHK12] J. De Loera, R. Hemmecke, and M. Köppe, Algebraic and Geometric Ideas in the
Theory of Discrete Optimization, MOS-SIAM Series on Optimization, Society
for Industrial and Applied Mathematics, December 2012. 36
[DLHO
+
09] J. A. De Loera, R. Hemmecke, S. Onn, U. G. Rothblum, and R. Weismantel,
Convex integer maximization via Graver bases, Journal of Pure and Applied
Algebra 213 (2009), no. 8, 1569–1577. 9, 10
[FGGS00] Edward Farhi, Jeffrey Goldstone, Sam Gutmann, and Michael Sipser, Quantum
Computation by Adiabatic Evolution, arXiv:quant-ph/0001106 (2000), arXiv:
quant-ph/0001106. 37
[Gra75] Jack E. Graver, On the foundations of linear and integer linear programming I,
Mathematical Programming 9 (1975), no. 1, 207–226 (en). 4, 9
33
[Hem02] Raymond Hemmecke, On the computation of hilbert bases of cones, Mathemat-
ical Software, World Scientific, July 2002, pp. 307–317. 37
[HJL
+
10] R. Harris, M. W. Johnson, T. Lanting, A. J. Berkley, J. Johansson, P. Bunyk,
E. Tolkacheva, E. Ladizinsky, N. Ladizinsky, T. Oh, F. Cioata, I. Perminov,
P. Spear, C. Enderud, C. Rich, S. Uchaikin, M. C. Thom, E. M. Chapple,
J. Wang, B. Wilson, M. H. S. Amin, N. Dickson, K. Karimi, B. Macready,
C. J. S. Truncik, and G. Rose, Experimental investigation of an eight-qubit unit
cell in a superconducting optimization processor, Physical Review B 82 (2010),
no. 2, 024511. 37
[HOW11] Raymond Hemmecke, Shmuel Onn, and Robert Weismantel, A polynomial
oracle-time algorithm for convex integer minimization, Mathematical Program-
ming 126 (2011), no. 1, 97–117 (en). 9, 10
[HS95] Serkan Hoşten and Bernd Sturmfels, GRIN: An implementation of Gröbner
bases for integer programming, Integer Programming and Combinatorial Op-
timization, Lecture Notes in Computer Science, Springer, Berlin, Heidelberg,
May 1995, pp. 267–276 (en). 10
[JAG
+
11] M. W. Johnson, M. H. S. Amin, S. Gildert, T. Lanting, F. Hamze, N. Dickson,
R. Harris, A. J. Berkley, J. Johansson, P. Bunyk, E. M. Chapple, C. Enderud,
J. P. Hilton, K. Karimi, E. Ladizinsky, N. Ladizinsky, T. Oh, I. Perminov,
C. Rich, M. C. Thom, E. Tolkacheva, C. J. S. Truncik, S. Uchaikin, J. Wang,
B. Wilson, and G. Rose, Quantum annealing with manufactured spins, Nature
473 (2011), no. 7346, 194–198 (en). 37
[Kat50] Tosio Kato, On the Adiabatic Theorem of Quantum Mechanics, Journal of the
Physical Society of Japan 5 (1950), no. 6, 435–439. 37
[LORW12] Jon Lee, Shmuel Onn, Lyubov Romanchuk, and Robert Weismantel, The
quadratic Graver cone, quadratic integer minimization, and extensions, Mathe-
matical Programming 136 (2012), no. 2, 301–323 (en). 10
[McG14] Catherine C. McGeoch, Adiabatic Quantum Computation and Quantum An-
nealing: Theory and Practice, Synthesis Lectures on Quantum Computing 5
(2014), no. 2, 1–93. 37
[MSW04] Kazuo Murota, Hiroo Saito, and Robert Weismantel, Optimality criterion for
a class of nonlinear integer programs, Operations Research Letters 32 (2004),
no. 5, 468–472. 9, 10
[MZK17] Salvatore Mandrà, Zheng Zhu, and Helmut G. Katzgraber, Exponentially Biased
Ground-State Sampling of Quantum Annealing Machines with Transverse-Field
Driving Hamiltonians, Physical Review Letters 118 (2017), no. 7, 070502. 13
34

[noa] 4ti2–A software package for algebraic, geometric and combinatorial problems on
linear spaces. 21
[Onn10] Shmuel Onn, Nonlinear Discrete Optimization: An Algorithmic Theory, Euro-
pean Mathematical Soc., 2010 (en), Google-Books-ID: kcD5DAEACAAJ. 8,
19
[Pap81] Christos H. Papadimitriou, On the Complexity of Integer Programming, J. ACM
28 (1981), no. 4, 765–768. 11
[Pot96] Loïc Pottier, The Euclidean Algorithm in Dimension N, Proceedings of the 1996
International Symposium on Symbolic and Algebraic Computation (New York,
NY, USA), ISSAC ’96, ACM, 1996, pp. 40–42. 10, 36
[ST97] Bernd Sturmfels and Rekha R. Thomas, Variation of cost functions in integer
programming, Mathematical Programming 77 (1997), no. 2, 357–387 (en). 10,
18
[Stu95] Bernd Sturmfels, Gröbner Bases and Convex Polytopes, University Lecture Se-
ries, vol. 8, American Mathematical Society, December 1995 (en-US). 37
[Stu03] , Algebraic Recipes for Integer Programming, arXiv:math/0310194
(2003), arXiv: math/0310194. 17, 18, 19
[TTN95] Sridhar R. Tayur, Rekha R. Thomas, and N. R. Natraj, An algebraic geometry
algorithm for scheduling in presence of setups and correlated demands, Mathe-
matical Programming 69 (1995), no. 1-3, 369–401 (en). 10
[VK18] Davide Venturelli and Alexei Kondratyev, Reverse Quantum Annealing Ap-
proach to Portfolio Optimization Problems, arXiv:1810.08584 [quant-ph, q-fin]
(2018), arXiv: 1810.08584. 38
35
A Graver Basis via Classical Methods
Classically any algorithm that can calculate all inclusion-minimal elements of any sublattice
L ⊆ Z
n
can be used to calculate Graver basis.All such algorithms have a computational
complexity that is exponential.
Pottier’s algorithm [Pot96] – also called completion procedure - starts with any lattice basis
G of L, and iteratively adds new vectors to G until any vector z ∈ L can be written as a
positive linear sign-compatible (same orthant) representation:
z =
P
i
λ
i
g
i
λ
i
∈ Z
>0
g
i
∈ G g
i
v z
(13)
If G reaches the representation property, then it contains all v-minimal elements. The vector
version is shown in Algorithm 5.
Algorithm 5 Normal Form
1: input vector s ∈ L, set G ⊂ L
2: output vector r = normalF orm(s, G) ∈ L s.t. s =
P
i
α
i
g
i
+ r, α
i
∈ Z
>0
, g
i
, r v s
3: Initialize: r ← s
4: while
∃g ∈ G s.t. g v r
do
5: r ← r − g
6: end while
7: return r
When r becomes zero, s is integer linear combination of g
i
’s in the same orthant. If r
does not reach zero, the last r has to be added to G thus in future iterations r becomes zero.
This is shown in Algorithm 6.
Algorithm 6 Pottier
1: input Generating initial set F ⊆ L = ker N(A)
2: output Graver basis set G ⊆ L\ {0}
3: Initialize symmetric set: G ← F ∪ (−F )
4: Generate S vector set: C ←
S
f,g∈G
{f + g}
5: while C 6= ∅ do
6:
∀s ∈ C : r ← normalF orm(s, G) and C ← C\ {s}
7: if r 6= 0 then
8: Update:
G ← G ∪ {r} and C ← C ∪ {r + g
i
} g
i
∈ G
9: end if
10: end while
11: return G
It can be shown [DLHK12] that the above algorithm terminates with all inclusion mini-
mal elements of L. (There remain non inclusion minimal terms that should be filtered out
36

based on the inclusion minimal concept.) Other algorithms for computing Graver bases exist
such as project and lift [CUWW97, Hem02] and using Lawrence lifting [Stu95].
B Quantum Annealing and D-Wave Processors
B.1 Quantum Annealing
Quantum annealing [FGGS00, McG14] uses the quantum adiabatic evolution [Kat50] to
solve optimization problems (QUBOs). (See [DAT18a] for a Morse theoretical description
for the quantum adiabatic evolution.) This is done by slowly evolving the ground state of
some known system into the sought ground state of the problem Hamiltonian. For instance,
D-Wave 2000Q [HJL
+
10, JAG
+
11, BHJ
+
14] implements quantum annealing using the time
dependent Hamiltonian
H(s) = A(s)H
I
+ B(s)H
P
(14)
where A(s) is monotonically decreasing while B(s) is monotonically increasing with respect to
normalized (slow) time s =
t
τ
∈ [0, 1]. τ is the total annealing time. The initial Hamiltonian
(with known ground state) is a transverse magnetic field H
I
= −
P
i
σ
x
i
where σ
x
i
is the i
th
Pauli x-matrix. The problem Hamiltonian H
P
is [Bar82]:
H
P
=
X
i∈V
h
i
σ
z
i
+
X
(i,j)∈E
J
ij
σ
z
i
σ
z
j
, (15)
where the parameters h
i
and J
ij
encode the particular problem instance. The σ
z
i
are Pauli
z-matrices. A measurement of the final state (i.e.,end of the adiabatic evolution at s = 1)
will yield a solution of the problem.
B.2 Quantum Annealer from D-Wave
We had access to a D-Wave Quantum Annealer 2000Q
TM
(C16-VFYC solver) administered
by NASA Quantum Artificial Intelligence Laboratory (QuAIL). This processor operates at
20(±5)milliKelvin and designed with 2048 qubits with a 95.5 qubits yield in its 16 by 16
block Chimera configuration. The Chimera structure has a limited connectivity as shown
in Figure 6. Therefore, the graph of a specific QUBO problem needs to be embedded into
the graph of hardware (Figure 6). Embedding an input graph into the hardware graph is a
specific instance of a graph homomorphism and its associated decision problem is in general
NP-complete [Cho08, DAT18b].
B.2.1 D-Wave SAPI
D-Wave’s software application programming interface (SAPI) is an application layer built
to provide resource discovery, permissions, and scheduling for quantum annealing. The
37
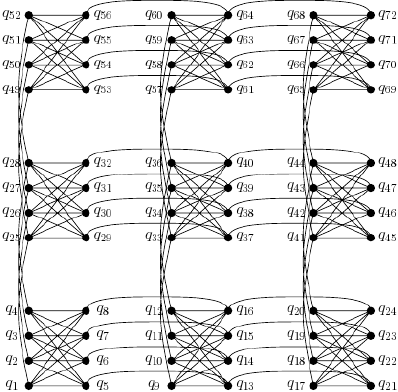
Figure 6: Schematic representation of a 3 by 3 block Chimera
codes for this project are implemented using Matlab SAPI (version 3.0). For embedding the
problem graph into hardware graph and also for parameter settings, the sapiFindEmbedding
(default parameters) and sapiEmbedProblem (adaptive problem per chain strength) software
modules are used. To solve, sapiSolveIsing and sapiUnembedAnswer modules (with two
distinct chainbreak strategies discussed in 4.3.1) are used. The maximum number of reads
available (10000) is used to increase the efficiency of each call (the number of unique optimal
and nonoptimal solutions).
B.2.2 Chainbreak strategy
Embedding a problem graph into the hardware graph has two parts: topological and problem
value mapping. The second aspect deals with setting of the parameters. All qubit values
in a chain are expected to remain at the same value (+1 or -1) at the end of quantum
annealing process. Due to situations in which the chain couplers (J
F
, identified couplers)
are not strong enough in comparison with problem couplers, chains frequently break. To
recover from these breaks, D-Wave has provided two post-processing strategies:
• Minimize energy, which is the default choice. This approach walks each broken solution
down to a local minimum by repeatedly flipping random bits to reduce solution cost,
somewhat like a zero-temperature simulated annealing, but without moves that do not
change the energy ([VK18]).
• Majority vote, on the other hand, is computationally less expensive: it sets the chain
value according to a majority vote of qubits in the chain, and a random value in case
of ties.
In structured and dense problems, where the embedding is close to a complete graph em-
bedding, all variables end up having long chains thus the probability of chain break in them
38
increases. In such situations, the effect of chainbreak post processing might exceed the effect
of quantum annealing itself. Therefore, in the results, we report the chain-break strategy
used as well as the percentage of chains broken. This indicates how much of the problem
has been impacted by chainbreak post-processing.
B.2.3 Annealing time
Annealing time (τ) is the (a) forward (or reverse) dynamic time from the start of annealing
to the end, or (b) from the start to the pause, or (c) from end of pause to end of annealing.
Our experimental tests show that when we select a large annealing time(i.e. 290µsec), we
have fewer chain breaks, but also fewer unique solutions. When we chose a small annealing
time (i.e. 1 − 10µsec) we have more chain breaks, but higher number of unique solutions
(using minimize energy chain-break strategy).
Pause is the static stopping time (usually in the middle of forward or reverse annealing)
that allows local exploration through thermal hopping and enhances the analog of classical
gradient descent. The pause time (ρ) is usually larger than forward (or reverse) annealing
time (τ ). In reverse annealing, the system is initialized with B(1) = 1 and A(0) = 0,
with all used qubits preset to a classically known solution. The annealing then turns back
to somewhere in the middle of the schedule, where the initial (transverse field) Hamiltonian
and problem Hamiltonian have roughly the same strength, and then pauses. After the pause,
there is a third phase, which is the final forward annealing. The reasoning behind reverse
annealing is that by starting from a known local minimum of the problem, the reciprocation
of quantum and thermal fluctuations might help the quantum state to tunnel through the
energy barriers (in reverse phase), while the pause and the (final) forward annealing allows
the system to relax and thermalize in vicinity of a better minimum. In our results, we report
the annealing schedule, because it is an important factor in the quality and quantity of the
results.
39
